1 . 10122052
Изобретение относится к програм-выходам втррых триггеров, связанных мному управлению и может быть исполь- первыми входами с четвертыми выходазовано в манипуляторах, управляемых, ми блока набора программ, а вторыми с помощью программных устройств.входами - с выходами датчиков полоИзвестно устройство для программ5 жения исполнительных.элементов, ввемного управления, содержащее блок на-дены два дешифратора,,вторые и Трабора программы, распределитель им-тьи элементы И, третьи триггеры, пульсов и логические элементы СОэлемент НЕ и третий элемент ИЛИ,
Недостатками устройства являютсясоединенный входами с выходами треузкая специализация, невозможность тьих триггеров, а выходами - с треприменения для управления робото-тех-тьим входом первого дешифратора и
ническими комплексами, малые функ-через элемент НЕ - с первыми входациональные возможности, т„е. работами второго и третьего дешифраторов,
только по жесткой программе.подключенных вторыми входами соответ Наиболее блийким к изобретению 5 ственно к первому выходу первого
является устройство, содержащее дат- счетчика импульсов и к выходу вточики положения, последовательно сое-рого счетчика,а выходами соответдиненные генератор импульсов, эле- ственно - к первым и к вторым вхомент И, блок распределения импульсов,дам вторых элементов И, соединенных
блок набора программы,, элементы ИЛИ,20 выходами с первыми входами третьих
первые триггеры, блоки задержки, -триггеров подключенных вторыми входавторые триггеры, дополнительный эле-ми к выходам третьих элементов И,
мент ИЛИ С21.соединенных первыми входами с пятыУстройство не обеспечивает изме-ми выходами блока набора программ,
нения программы при изменении внеш- 5 а; вторыми входами - с выходами дат
.них условий работы (,например, при от-чиков состояния объекта управления,
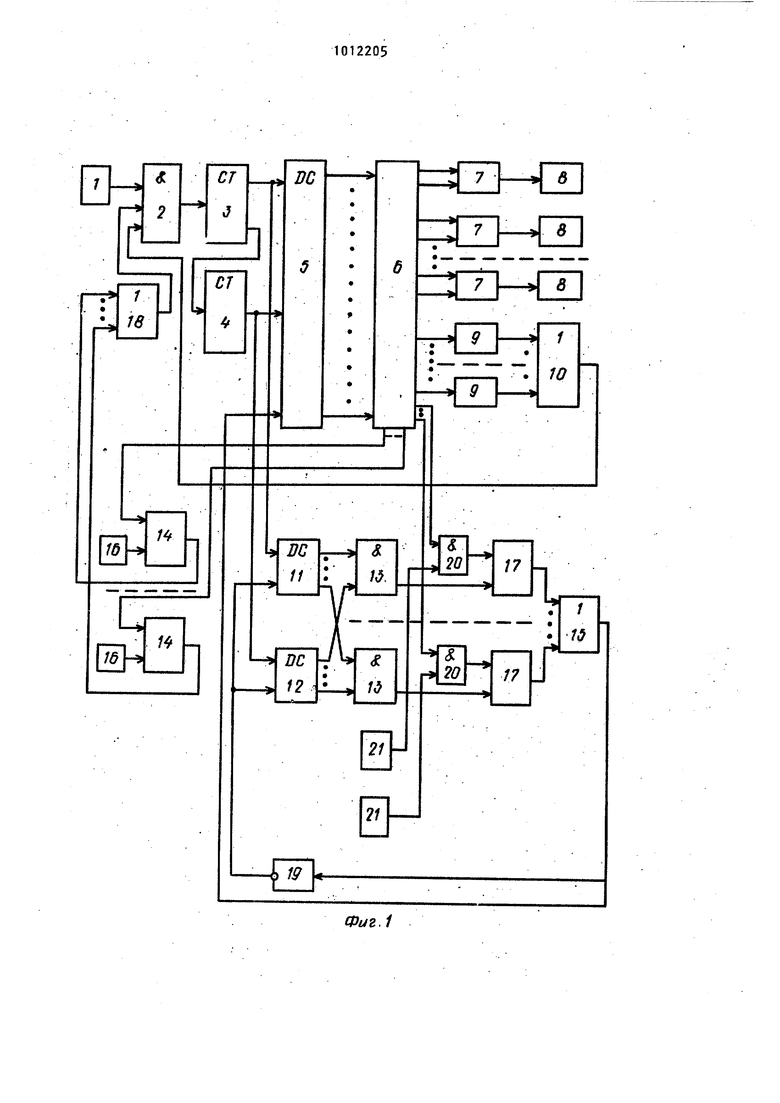
сутствии деталей в одном из загру- На фиг. 1 дана блок схема устройзочных устройств, поломки одного изства; на фиг. 2 - временная диаграмэлементов, входящих в состав робо-«а участка программы; на фиг. 3 тизированного комплекса, при необхо-30 временная, диаграмма работы второго
димости включения смазочных уст- -триггера,
ройств, износе инструмента и др.).Устройство содержит генератор 1
Цель изобретения - расширениеимпульсов, первый элемент И 2, перфункциональных возможностей устройст-вый счетчик 3 импульсов, второй
ва.35 А импульсов, первый дешиф- Поставленная цель достигается тем,ратор 5, блока 6 набора программ, что в устройство программного управ-первые триггеры 7, объекты 8 управления, содержащее датчики состоянияления, элементы 9 задержки, первый объекта управления, генератор импуль-элемент ИЛИ 10, второй дешифратор 11, сов, подключенный выходом к первому40 третий дешифратор 12, вторые элеменвходу первого элемента И, соединен-ты И 13, вторые триггеры li, третий ного выходом с входом первого счетчи-элемент ИЛИ 15, датчики 16 положека импульсов, подключенного первым-ния исполнительных элементов, третьи выходом к первому входу первого де-триггеры 17, второй элемент ИЛИ 18, шифратора, а вторым выходом - к45 элемент НЕ 19, третьи элементы И 20, входу второго счетчика импульсов,датчики 21 состояния объекта управсвязанного выходом с вторым входомления.
первого дешифратора подключенногоДатчики 16 положения исполнительвыходами к входам блока набора про-чых элементов представляют собой люграмм, соединенного первыми и вторы-50 ® контактные или бесконтактные ми выходами соответственно с первымиконечные или путевые переключатели и вторыми входами первых триггеров,(датчики положения). Устанавливаюта третьими выходами - с входами эле-ся они на рабочих органах манипуля(iieHTOB задержки, подключенных выхода-тора загрузочных устройствах, станми к входам первого элемента ИЛИ,55 ДРУгом оборудовании, родящем связанного выходом с вторым входомв состав роботоизированного комплекпервого элемента И, соедйненнногоса. В качестве датчика состояния iтретьим входом с выходом второго эле-(положения) могут использоваться конмента ИЛИ, подключенного входами ктактные реле. Под включенным состоя310
нием датчика понимается такое его
состояние, когда через датчик на вход устройства поступает сигнал с уровнем логической единицы.
Датчик состояния объекта управлеяия конструктивно может быть идентичен датчику положения и опрашивает-; ся в случае, когда при наличии какого-либо, изменения в процессе.работы роботизированного комплекса (отсутствие смазки, поломка резца, отключение одного из станков и т.д.) необходимо перейти к подпрограмме или пропустить участок программы.
Устройство работает следугацим образом.
До начала работы все триггеры, входящие в устройство, предварительно установлены в нулевое состояние.
Тактовые импульсы с заданной частотой с выхода генератора 1 через элемент И 2 поступают на вход счетчика 3 импульсов (единиц). Каждый десятый импульс с выхода счетчика 3 импульсов (единиц) поступает на вход сМетчика t импульсов (десятков). На выходах дешифратора 5 последовательно появляются сигналы управления, которые поступают на вход блока 6 набора программы, представляющего собой диодную матрицу.
При поступлении сигнала управления на единичный вход одного из триггеров 7 включается объект 8 управления, который находится во включённом состоянии о поступления сигнала управления на нулевой вход триггера. Сигнал управления, поступивший на вход одного из элементов 9 задержки, вызывает формирование на его выходе сигнала Запрет, проходящего на вход элемента И 2 и останавливающего считывание программы до истечения выдержки времени.
При поступлении сигнала управления на вход одного из триггеров 1 и отсутствии смгнала от соответствующего датчика 16 положения исполнительных элементов, на выходе триггера формируется сигнал Запрет, который через элемент ИЛИ 18 поступает на вход элемента И 2 , останавливая считывание программы (фиг. 3).
Конец сигнала Запрет формируется при поступлении на второй (нуле54
вой) вход триггера 14 сигнала от датчика 16 положения.
Сигнал Запрет отсутствует на выходе триггера , если запрашиваемый датчик уже находится во включенном состоянии. Запрос датчика 21 состояния объекта управления происходит при поступлении сигнала управления через элемент И 20 на второй
(единичный) вход соответствующего триггера 17.
При отсутствии сигнала от датчика 21 состояния переключения триггера 17 не происходит и выполняются
все команды согласно программе. При наличии сигнала от датчика 21 состояния триггер 17 переключается в единичное состояние. Сигнал с его выхода ч„ерез элемент ИЛИ. 15 поступает
на третий (управляющий) Ьход дешифратора 5, запрещая появление на его выходах сигналов управления, и через элемент НЕ 19 - на управляющие входы дешифраторов 11 и 12, подключенных соответственно к счетчикам ;3 и импульсов.При этом на выходах дешифраторов 11 и 12 появляются сигналы, соответствующие состояниям счетчиков 3 и .
0
При достижении заданного номера команды на выходе элемента И 13 появляется сигнал, перебрасывающий триггер 17 в нулевое состояние. При этом дешифратор 5 открывается, и с
5 его выходов поступают сигналы управления, начиная с команды, до момента поступления которой дешифратор был закрыт.
Таким образом при наличии сигна0лов состояния объекта управления происходит пропуск .заданного участка программы. Количество датчиков состояния может быть произвольным.
Такое построение устройства позво5ляет управлять роботизированным комплексом со сложной разветвленной программой.
Устройство обладает модульной конструкцией, что значительно упрощает
0 ремонт в производственных условиях. Кроме того, оно позволяет комплектовать систему управления применительно к .конкретному роботизированному комплексу.
Фиг. 1
Фи,2

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1985 |
|
SU1273883A1 |
| Устройство для программного управления | 1987 |
|
SU1596307A1 |
| Устройство для программного управления | 1985 |
|
SU1267362A2 |
| Устройство для программного управления | 1984 |
|
SU1182488A1 |
| Устройство для циклового программного управления | 1979 |
|
SU773573A1 |
| Устройство для программного управления намоточным станком | 1987 |
|
SU1451648A1 |
| Устройство для программного управления объектами | 1982 |
|
SU1041992A1 |
| Устройство для программного управления объектами | 1984 |
|
SU1269098A2 |
| Устройство для циклового программного управления | 1986 |
|
SU1312527A1 |
| Устройство для программного управления объектом | 1980 |
|
SU888135A1 |

УСТРОЙСТВО ПРОГРАММНйГО УПРАВЛЕНИЯ, содержащее датчики состояния объекта управления и генератор импульсов, подключенный выходом к первому входу первого элемента И, соединенного выходом с входом первого счетчика импульсов, подключенного первым выходом к первому входу первого дешифратора, а вторым выходом - к входу- второго счетчика импульсов, связанного выходом с вторым входом первого дешифратора, подключенного выходами к входам блока набора программ, соединенного первыми и вторыми выходами Соответственно с первыми и вторыми входами первых, триггеров, а третьими выходами с входами элементов задержки, подключенных выходами к входам первого i элемента ИЛИ, связанного выходом с вторым входом neipBoro элемента И, соединенного третьим входом с выходом второго элемента ИЛИ, подключенного входами к выходам вторых триггеров, связанных первыми входами с . четвертыми выходами блока набора программ, а вторыми входами - с выходами датчиков положения исполнительных элементов, отличающеес я тем, что, с целью расширения функциональных возможностей устройства, в него введены два дешифратора, вторые и третьи элементы И, третьи триггеры, элемент НЕ и третий элемент ИЛИ, соединенный входами с выходами третьих триггеров, а выS ходами - с третьим входом первого дешифратора и через элемент НЕ - с первыми входами второго и третьего дешифраторов, подключенных вторыми входами соответственно к nepBo iy выходу первого счетчика импульсов и к выходу второго счетчика, а вь1ходами соответственно - к первым и вторым входам вторых элементов И, to to соединенных выходами с первыми входами третьих триггеров, подключенных о вторыми входами к выходам третьих Сл элементов И, соединенных первыми входами с пятыми выходами блока набора программ, а вторыми входами - с выходами датчиков состояния объекта управления.
.д
