Изобретение относится, к автомати ке и может быть использовано в сист мах программного управления двухпоз ционными объектами. Известна система программного упрйвпения роботами, содержащая генератор тактовых импульсов, связанны со схемой совпадения, блок распреде ления импульсов, наборное штекерное поле,схему управления объектом, Известная система обеспечивает управление движением исполнительного механизма робота и внешнего технологи ческого оборудования l. Однако система не обеспечивает защиту исполнительного механизма от аварийных ситуаций при неправильном наборе программы и в случае отказа 1иеханизма. Наиболее близким по технической сущности к предлагаемому является устройство для программного управления, содержащее датчики положения и последовательно соединенные генератор импульсов, элемент И, блок распределения импульсов, блок набора програм1«), элементы ИЛИ, триггеры блоки задержки, вторые триггеры, еди ничные входы которых подключены к .срответствукяпим датчикам положения, Известнее устройство обеспечивает программное управление промышленным роботом 2 . Недостатком известного устройства является сложная схема управления следующим шагом програл ы, так как на кажддаа датчик положения требуется отдельный триггер. Каждый датчик положения опрашивается только в определенном шаге программы. Применение таких датчиков положения не дает возможности построения постоянных защитных блокировок, что усложняет процесс программирования и не обеспечивает надежную работу устройства. Цель изобретения - повышение надежности устройства. Указанная цель достигается тем, что устройство для циклового программного управления, содержащее блок датчиков положения и последовательно соединенные генератор импульсов, ключ, первый элемент И, блок распределения и блок набора программы, подключенный первыми входами к первым входам блоков управления, второй вход первого элемента И подсоединен через триггер к выходу первого элемента задержки.
а второй выход блока набора программы - ко входу второго элемента задержки,введены последовательно соединенные формирователь режимов, анализатор и элемент ИЛИ, а также последовательно соединенные логический блок, второй элемент И и элемент НЕ, выход которого подключен ко входу первого элемента задержки второй вход триггера соединен с выходом второго элемента И, подключенно.го вторым входом к выходам блоков управления, а третьим входом - к выходу блока датчиков положения и ко .второму входу анализатора, третий вход которого соединен с вьаходом логического блока, .а второй выход со вторыми вxoдa в блоков управления подсоединенных третьими входами ко второму входу блока распределения и через элемент ИЛИ - к выходу второго элемента задержки, формирователь режимов подключен к блоку распределения, первый вход логического блока к выходу блока датчиков положения, а второй вход - к третьему выходу блока набора прюграммы.
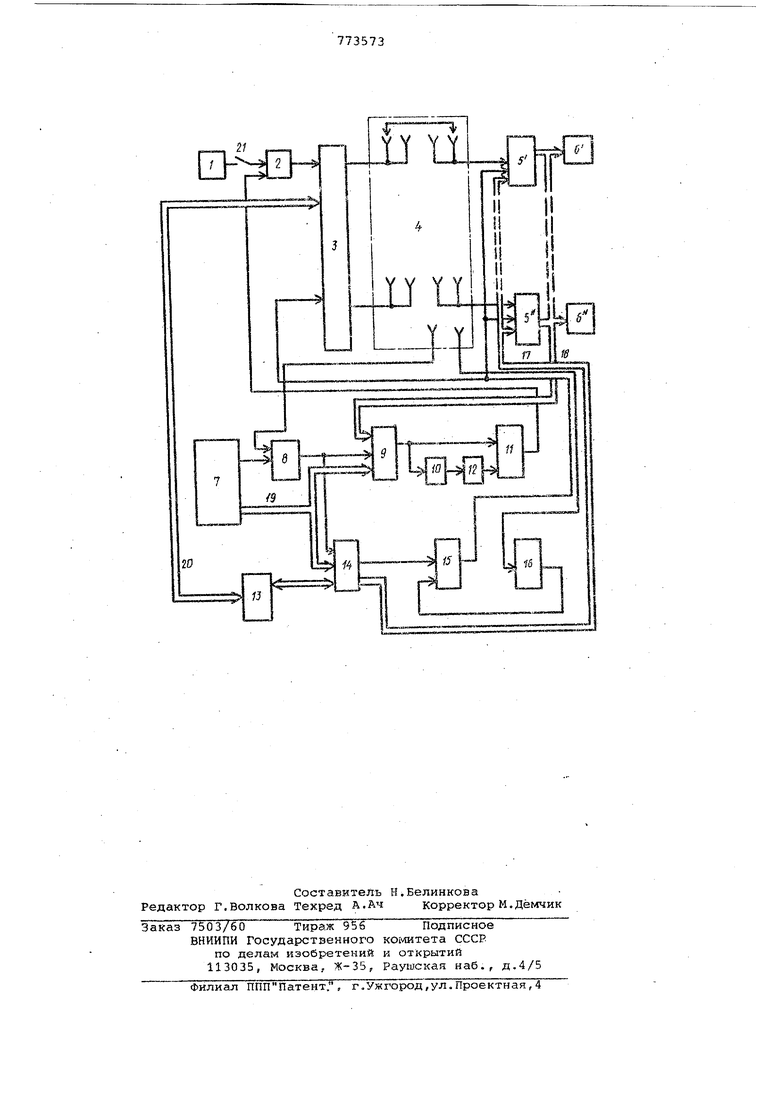
На чертеже представлена блок-скема устройства.
Устройство содержит генератор импульсов 1, через ключ связанный с первым входом первого элемента И 2, выход которого связан с первым входом блока 3 распределения, который через блок 4 набора программа и блоки управления подключен к управляемым объектам 6 -б, блок 7 датчиков положения, выход которого соединен с одним яз входов логического блока 8, подключенного ко входу второго элемента и 9, выход которого связан с элементом НЕ 10 и нулевым входом триггера 11, первый элемент задержки 12, соединенны с единичным входом триггера 11, формирователь 13 режимовJвключенный между выходом блока 3 распределения и третьим входом анализатора 14, выход которого связан с одним входо элемента ИЛИ 15, другой вход которого подключен к выходу второго эле мента 16 задержки между циклами.
Блок 3 содержит счетчик, элемент сброса и дешифратор и предназначен для последовательного распределения программных сигналов и вьщач кода шага для определения условий блокировок.
Блоки 5 -5 содержат логические И и триггер и предназначены для управления объектами б -б , Блок 7 представляет собой совокупность датчиков, количество и тип которых зависит от применяемых объектов б-б, и датчика контроля предыдущего оборудования.
Блок 8 содержит набор логических элементов и предназначен для организации связи объектов б -б с преч
дьщущим технологическим оборудованием.
Формирователь 13 содержит набор логических элементов, соответствующих возможным аварийным и запретным ситуация на каждом шаге програм1укл и предназначен для подачи кода условий блокировок на анализаторе 14,
Анализатор 14 содержит набор логических элементов и предназначен для сравнения кода условий блокировок с данными блока 7 и вьщает команды ма блокировку или сброс блоков 5-5 например при нахождении исполнительного органа объекта в зоне действия штампа.
1аины 17,18,19 и 20 представляют собой совокупность параллельных линий связи, количество которых зависит от числа управляе&влх объектов. Устройство также содержит ключ 21,
Устройство работает следующим образом.
До начгша работы все блоки предварительно установлены в нулевое состояние. Сигналы из триггеров блоков по шине 18 управления поступают на И 9 и там сравниваются с сигналами, приходящими от блока 7 по шине 19, Элемент И 9 вглдает сигнал совпгедения на триггер 11 и элег-юнт НЕ 10, Из триггера 11 поступает сигнал Разрешение на И 2,
После нажатия ключа 21 тактовые импульсы от генератора 1 поступают на блок 3, Счетчик блока 3 выдает код первого шага на формирователь 13, Сигнал управления из вьдходов блока 3 поступает па соответствующее приемное гнездо блока 4 и через него на входы соответствукндих блоков 5 -з , Происходит переключение триггеров в блоках 5-5 и сигнал воздействует на соответствуккцие управляемые объекты б -6,
Одновременно сигнгш управления по шине 18 управления поступает на элемент И 9, Так как состояние тригзгеров в блоках в начале выполнения програмьал на данном шаге не соответствует состоянию сигналов на шине 19, элемент И 9 выдает сигнал, Несовпадение, который воздействует на триггер 11, переключая его в положение Запрет, Сигнал Запрет подается на второй вход элемента И 2, Последняя запрещает поступление тактовых импульсов на блок 3, который переходит в режим ожидания разрешения на следуннций шаг. После того, как перемещающийся объект б-б достиг заданвого положения, сигналы на шинах 18 и 19 совпадают и элемент И 9 выдает сигнал Совпадение на элемент НЕ 10, Иивертированный сигнал запускает элемент 12, который время задержки между шагами переводит триггер 11 в положение
Разрешение. Время задержки ме;кду шагами необходимо для ожидания окончания механического дребезга объектов 6-б и увеличивает точность позиционирования объектов 6-б в конечных позициях. Сигнал Разрешение поступает на элемент И 2 и блок 3 переходит на следующий шаг.
Кроме того, устройство позволяет выполнить следующие дополнительные действия.
Из блока 3 по шине 20 на формирователь 13 поступает код шага программы. Последний выдает на ангтизатор 14 код условий блокировок для каждого шага програ ы, который сранивается с информацией, приходящей от блока 7 по шине 19.
Анализатор 14 определяет степень опасности создававшейся ситуации и в зависимости от этого воздействует на блоки в виде сигналов блокировок. В случае аварийных ситуаци через элемент ИЛИ 15 происходит сброс блоков блока 3 в исхоное положение.
При необходимости согласования работы объекта управления 6 -6 с предьвдущим технологическим оборудованием, из блока 4 на вход блока 8 подается сигнал запроса. Блок 8 устанавливается в режим ожидания сигнала из блока 7 и подает сигнал блокировки на элемент И 9 и анализатор 14. Один из датчиков блока 7 осуществляет контроль за предьадущим технологическим оборудованием, а остальные контролируют положение объектов . После окончания цикла работы предьздущего технологического оборудования, соответствующий датчик блока 7 В1дцает синхросигнал на вход блока 8, который выходит из режима ожидания и снимает блокировку элемента И 9 и анализатора 14.
Работа устройства продолжается согласно набранно й программы, или описанию выше.
Применение вияеупомянутых блоков в схеме устройства выгодно отличает предлагаемое устройство от известного, так как оно защищает исполнительные узлы управляемого объекта и внешнего технологического оборудования от повреждений при аварийных ситуациях. Выработка сигналов блокировки и сброса дает возможност ввести в работе управляемого объекта, например промьшшенного робота, инстинкт самосохранения.
. Введение задержки между шагами программы увеличивает точность позиционирования в конечных положениях, что особенно важно при больших скоростях перемещения управляемых объектов.
Формула
изобретения
Устройство для циклового програм10
лного управления, содержащее блок датчиков положения и последовательно соединенные генератор импульсов, ключ, первый элемент И, блок распределения и блок набора программы, подключенный первыми входами к первым входам блоков управления, второй вход первого И подсоединен через триггер к выходу первого элемента задержки, а второй выход блока набора программы - ко входу второго элемента задержки, о т л и ч а ющ е е с я тем, что, с целью повышения надежности устройства, в него введены последовательно соединенные
формирователь режимов анализатор
и элемент fUIH, а последовательно соединенные логический блок, второй элемент И и элемент НЕ, выходы которого подключены ко входу первого элемента задержки, второй вход триггера соединен с выходом второго элемента И, подключенного .вторым входом к выходам блоков управления, а третьим входом - к выходу блока датчиков положения и ко второму входу
5 ангшиэатора, третий вход которого
соединен с выходом логического блока, а второй выход - со вторыми входами блоков управления, подсоединенных третьими входами ко второму входу
0 блока распределения и через элемент ИЛИ - к выходу второго элемента задержки, формирователь режимов подключен к блоку распределения, первый вход логического блока - к выходу
блока датчикфв положения, а второй
вход - к третьему выходу блока набора программы.
Источники информации, принятые во внимание при экспертизе
1.Белянин П.Н. Применяеьсле роботы. М., Машиностроение, 1975, с. 209-215.
55 2.Авторское свидетельство СССР № 537328, кл. G 05 В 19/08, 1975 (прототип).
21
V V V VГ Г
Т Т 11-- О I
J Li-L- fnrLlJ
IP I 11 ii 1
и П

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для циклового программного управления | 1982 |
|
SU1084738A1 |
| Устройство для программного управления объектами | 1982 |
|
SU1041992A1 |
| Устройство для программного управления | 1984 |
|
SU1167585A1 |
| Устройство для циклового программного управления | 1986 |
|
SU1312527A1 |
| Устройство для циклового программного управления | 1986 |
|
SU1381432A1 |
| Устройство для программного управления объектами | 1989 |
|
SU1777120A1 |
| Устройство для управления робото-технологическим комплексом | 1983 |
|
SU1233105A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для программного управления | 1975 |
|
SU537328A1 |
| Устройство для программного управления объектами | 1984 |
|
SU1269098A2 |