фиг.1 Изобретение относится к системам автоматического контроля и преобразования перемещений, а именно к датчикам линейного перемещения. Известен двухтактный дифференциал ный датчик линейных перемещений, содержащий магнитную систему, состоя щую из двух параллельно расположенных Ш-образных сердечников с обмотками возбуждения, в пазах средних стержней сердечников l. Недостатком этого датчика являет ся небольшой диапазон измеряемых линейных перемещений и нелинейность вы ходной характеристики, зависящие от площади перекрытия стержня и якоря, которая в данном датчике невелика,поскольку ограничена габаритными размерами последних. Наиболее близким по своему техническому решению К предлагаемому изоб ретению является датчик линейного пе . ремещения, содержащий замкнутый магнитопровод и два параллельно расположенных стержня, соединенных по кон цам магнитопроводящими перемычками, а внутренние стержни направлены встречно и параллельно боковым сторонам магнитопровода. На стержнях размещены обмотки возбуждения, которые соединены согласно, а на перемычках магнитопровода размещены секНИИ обмотки подмагничивания, включен мне встречно.В пазу между элементами установлен якорь с возможностью пере мещения в плоскости,параллельНОЙ плоскости продольного сечения магнито провода 2. Недостатком этого датчика являетс небольшой диапазон измеряемых линейных перемещений и нелинейность выход ной характеристики, так как площадь перекрытия стержня якорем невелика, а величина рабочего воздушного зазор между якорем и магнитопроводом большая и нестабильная в процессе работы Также нестабильно и число витков обмотки, создающих магнитный поток. Цель .изобретения - расширение диапазона измеряемых линейных пере.мещений при одновременной линеаризации выходной характеристики,- а сле довательно, и повышение точности дат чика. Поставленная цель, достигается тем, что в датчик линейного перемещения, содержащий два параллельно расположенных магнитопровода, соединенных по концам основными магнитопроводящими перемычками, на которых расположены секции обмотки возбуждения, два основных стержня, на KOTQрых расположены секции распределенной обмотки подмагничивания, и якорь введены два дополнительных стержня с перемычками, основные стержни соединены одним из торцов с внутренней стороной соответствующего параллельно расположенного магнитопровода и смещены один относительно другого, каждый дополнительный стержень расположен над соответствующим основным стержнем и связан с ним дополнительной магнитопроводящей перемычкой, между основными и дополнительными стержнями перпендикулярно .К ним расположен якорь. На фиг.1 показан датчик, общий эид; на фиг.2 - схема соединения обмоток датчика и распределение магнитных потоков. Датчик линейного перемещения содержит два параллельно расположенных магнитопровода 1 и 2,соединенных по концам перемычками 3 и 4, два основных стержня 5 и 6, два дополнительных стержня 7 и 8 с перемычками 9 и 10, секции 11 и 12, обмотки возбуждения секции 13 и 14,обмотки подмагничивания и якорь 15. Магнитопроводы 1 и 2 с перемычками 3 и 4 образуют общий замкнутый магйитопровод 16. Датчик линейного перемещения работает следующим образом. При подаче напряжения переменного тока на секции 11 и 12 обмотки возбуждения каждая из них создает в общем магнитопроводе 16 магнитный поток. Так как секции 11 и 12 обмотки возбуждения включены последовательно согласно, то общий магнитный поток Р06(фиг.2 1 замыкается по магнитопроводам 1 и -2 перемычками 3 и 4, При подаче постоянного напряжения на обмотку подмагничивания сек Ция 14 (или 13) этой обмотки создает постоянный магнитный поток, Ф или Ф 2 ) который замыкается через стержень 6 (или 5), воздушный зазор , магнитопровод 16. В магнитопроводе 16 магнитный поток Фр-, или. п2 Разделяется на две части, одна из которых замыкается через перемычку 4,другая - через перемычку 3. В перемычке 4 магнитный поток Ф направлен . согласно с мГагнитнымпотоком pci5 магнитный поток Ф.-2 встречно Фрс,б- между собой эти потоки направлены встречно. В перемычке 3 магнитный поток Ф направлен встреч- согласно с а между собой эти потоки направлены встречно. Такое распределение магнитных потоков достигается за счет последовательно-встречного включения секции 14 и 13 обмотки подмагничивания. Магнитные потоки и Фр2 изменят магнитную проницаемость всего агнитопровода 16,т.е. его магнитное опротивление R для магнитного отока Фрс|б/ ведет iK изменению ока в секции 11 и 12 обмотки возбужения, а следовательно, и в сопротивлении нагрузки, подключенном к этой обмотке. , В датчике при перемещении контролируемого объекта якорь 15-движется вдоль основных стержней 5 и б и вдол дополнительных стержней 7 и 8. При таком движении величина рабочего воздушного зазора Гр остается постоянной, следовательно, остается посто янным и магнитное сопротивление этог зазора Я. Магнитное сопротивление всего магнйтопровода 16 R, много мен ше .магнитного сопротивления воздушного потока Rjt и его величиной можно пренебречь, т.е. при .iR R««R, -«-- f, |л |Г ЛТакже остается постоянным удельно число витков Wy.и ток в обмотке подмагничивания Э . Если обозначить то Ф Kjj. Отсюда видно, что изменение маг,нитного потока Ф зависит от Изменения положения якоря 15 относительно стержней 5-8. При среднем по;1ожении якоря 15 (XppJ магнитные потоки Ф,, и Фр2 перемычках 3 и 4 равны по величине и направлены встречно друг другу,, т.е. компенсируют друг друга а следовательно, не влияют.на магЬит ное сопротивление всего магнйтопровода R и ток в нагрузке. При перемещении якоря 15 влево ил вправо относительно среднего положения Jign вслед за линейным перемещё нием крнт ролируемого объекта на расстояние л X нарушается равенство маг нитных потоков Ф и Ф 2 в перемычках 3 и 4, что ведет к изменению ма нитной проницаемости магнйтопровода 16; и следовательно, к изменению то в сопротивлении нагрузки, по котором судят о величине линейного перемеще рия контролируемого объекта. При этом, если при перемещении якоря 15 произошло увеличение длины части стержня 6 (. или 5) , создающего агнитный поток Ф, (или зменение этого потока будет равно ЛФп-j,) к (XCP+UX). Если произошло уменьшение длины части стержня 6 (или 5 то изменение магниткого потока Ф,(или аф„2 J К .- ДХ). Поскольку магнитные : потоки Фр и Фр2 в перемычках 3 и 4 направлены встречно, что суммарный магнитный поток будет равен Ф 7 ЛФп-1 - ЛФР2 К (Хср. )-К(Хрр -ЛХ) 2КЛХ. При этом изменение тока в сопро- . тивлении нагрузки будет пропорционально изменению потока дФ. При перемещении якоря 15 на рас- . стояние дХ Х(,р , т.е. в одно из крайних положений, изменение магнитного потока ДФ будетх максимальным и равным . 1пах При этом изменение тока в нагрузке тоже будет максимальным. Линейное перемещение контролируе-v мого объекта определяется величиной тока, наводимого в сопротив-лении нагрузки, которая зависит только от взаимного расположения якоря 15 относительно стержней 5 и 6, т.е. от длины части стержней 6 .или 5) создающей магнитный поток Ф (или )Выполнение стержней 5 и 6, разнесенными в направлении, перпендикулярнф боковым сторонам магнйтопровода 16, установка над стержнями 5 и 6 дополнительных стержней 7 и 8, замкнутых с йагнитопроводом 16 со стороны соединения с стержнями 5 и 6, и установка якоря 15 между стержнями с возможностью перемещения вдоль них в совокупности с распределением секций 13 и 14 обмотки подмагничивания по длине каждого стержня 5 и 6, и размещение секции обмотки возбуждения на перемычках 3 и 4 магнйтопровода 16 позволяет расширить диапазон измеряемых линейных перемещений при одновременной минеаризации выходной характеристики.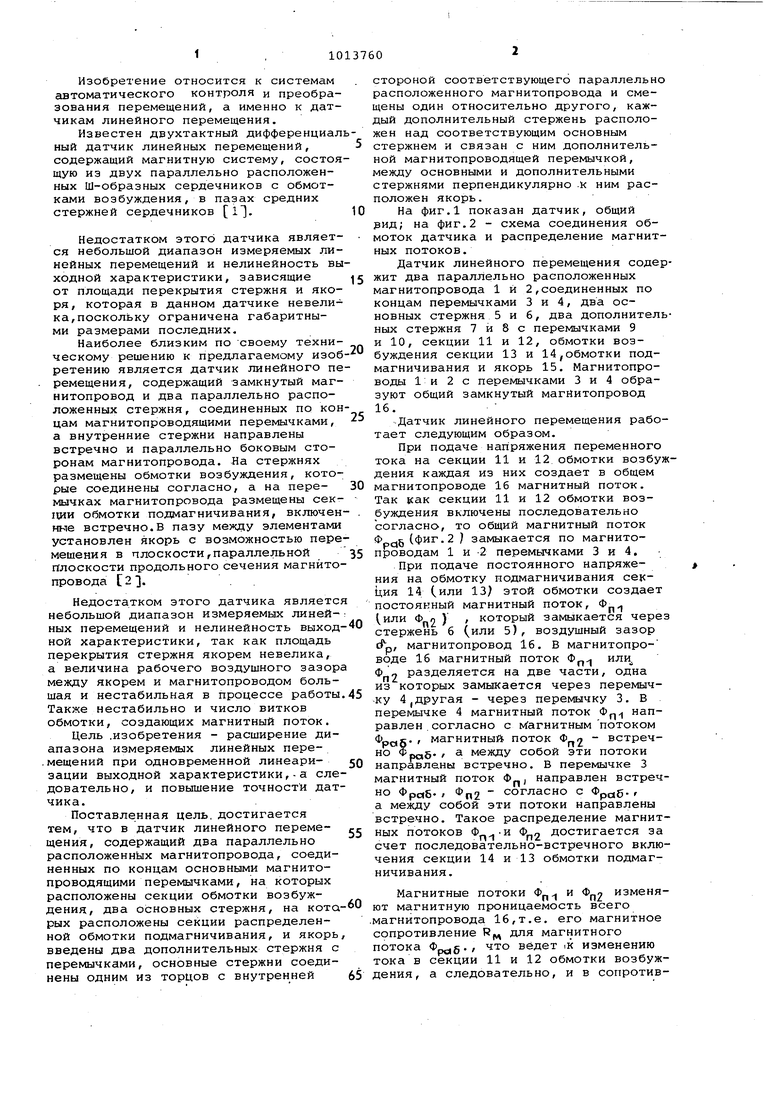
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля многокомпонентных перемещений объекта | 1981 |
|
SU1029200A1 |
| ПОЛЯРИЗОВАННОЕ МАЛОГАБАРИТНОЕ ЭЛЕКТРОМАГНИТНОЕ РЕЛЕ | 2018 |
|
RU2713475C1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2138773C1 |
| Линейный электродвигатель постоянного тока | 1985 |
|
SU1265936A1 |
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2132534C1 |
| Датчик угловых перемещений | 1989 |
|
SU1620815A1 |
| Индуктивный датчик перемещений | 1979 |
|
SU870921A1 |
| Электромагнитный датчик для контроля положения металлических изделий | 1985 |
|
SU1268232A1 |
| ИНДУКТИВНЫЙ ДАТЧИК ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2011 |
|
RU2485439C2 |
| Преобразователь перемещения в код | 1982 |
|
SU1042054A1 |

ДАТЧИК ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ, содержащий два параллельно расположенных магнитопровода, соединеннцх по концам основными магнитопроводящими перемычками,- на которых расположены секции обмотки возбуждения, два основных стержня, на которых расположены секции распределенной обмотки под№ агничивания, и якорь, о т л ичающийся тем, что, с целью расширения диапазона измер гния и повышения точности датчика, в него введены два дополнительных стержня с перемычками, стержни соединены одним из торцов с внутренней стороны соответствующего параллельно расположенного магнитопровода и смещены один относительно другого, каждый дополнительный стержень расположен над срответствующим основным стерж- . нем и связан с ним дополнительной магнитопроводящей перемычкой, между основными и дополнительными стержнякш перпендикулярно к ним расположен якорь. оо si ж
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU172655A1 | |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| 0 |
|
SU156872A1 |
