(54) ИНДУКТИВНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ

| название | год | авторы | номер документа |
|---|---|---|---|
| Индуктивный датчик перемещений | 1982 |
|
SU1076748A2 |
| Устройство для контроля и измерения конечных перемещений поршня домкрата | 1986 |
|
SU1409757A1 |
| Устройство для измерения разности давлений | 1982 |
|
SU1064172A1 |
| Измерительный трансформатор постоянного тока | 1983 |
|
SU1092581A1 |
| Бесконтактный переключатель | 1986 |
|
SU1372406A1 |
| Дифференциальный индуктивный преобразователь перемещений | 1980 |
|
SU937991A1 |
| Электромагнитное реле | 1981 |
|
SU1001217A1 |
| Путевой датчик | 1988 |
|
SU1638045A1 |
| Электропривод возвратно-поступательного движения | 1984 |
|
SU1327243A1 |
| Устройство для контроля и измерения конечных перемещений поршня домкрата горной машины | 1986 |
|
SU1416704A1 |
I
Изобретение относится к области измерения перемещений и прежде всего к измереншо угловых перемещений и наклонов с помощью индуктивных датчиков.
Известны датчики, содержащие Ш-образный сердечник с обмотками возбуждения на среднем стержне и измерительными обмотками на крайнем 1.
Эти датчики находят применение в устройствах дтя определения углов наклона с маятником, выполняющим функции якоря и поворачивающимся относительно сердечника.
Для повыщения чувствительности в устройствах подобного типа предлагалось размещать якорь-маятник между двумя Ш-образными сердечниками 2.
Однако такое достаточно сложное конструктивное рещениерассчитано на использование напряжения высокой частоты.
Наибо1лее близким техническим рещением к изобретению является индуктивный датчик, используемый в качестве датчика давления 3.
Этот датчик содержит якорь, подвижный относнтельно Ш-образного сердечника с обмоткагяя подмагничивания на среднем стержне и выходными измерительными обмотками, включенными в мостовую схему и размещенными на крайних стержнях, выполненных в виде Ш-образных магнитопроводов с замьпсающимн накладками.
Чувствительность зтого датчика к мальпм угловым смещениям якоря оказьтается недостаточной, поскольку изменение индуктивности вызывается только диффенциацией зазоров
10 в магнйтопроводах крайних стержней.
Цель изобретения - повышение чувствительности.
Это достигается тем, что на каждом из край15них стержней размещено по дополнительной обможе переменного тока, подключенной последовательно через выпрямительный мост к обмотке подмапшчнвания, располагающейся с ней на общем участке магннтопровода на поМперечном стержне сердечника.
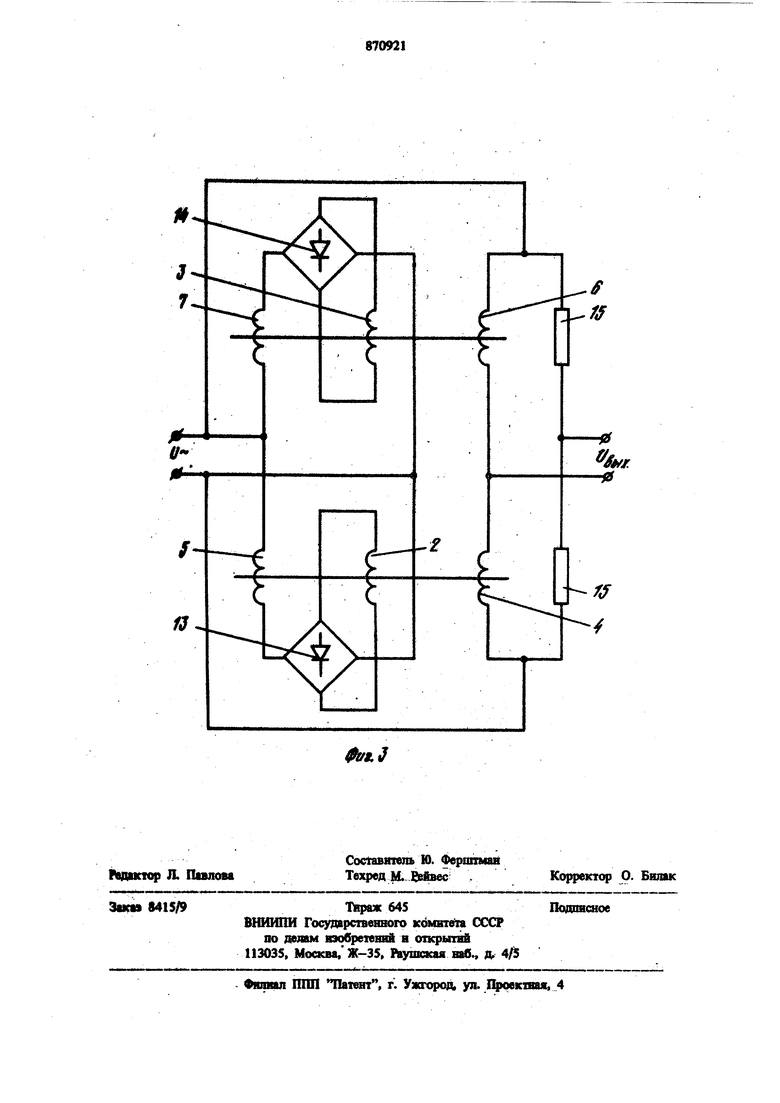
При таком выполнении на изменение потока подалагничиваннл влияет не только изменение воздупшого зазора прн повороте якоря, но и сказывается влидние дополнительных обмоток переменного тока. На фиг. 1 показано маятниковое устройство для измерения наклонов с датчиком; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 электрическая схема устройства. Индуктивный датчик перемещений содержит Ш-образный сердечник 1, вьшолненный из магнитомягкого материала. На поперечных стержнях сердечника расположены обмотки 2 и 3 постоянного тока. Крайние стержни сердечника выполнены в виде двух замкнутых Ш-образных магнитопроводов, в окнах которых размещены обмотки 4, 5, 6 и 7 переменного тока, причем плоскость расположения Ш-образных магнитопроводов крайних стержней перпендикулярна плоскости расположения Ш-образного сердечника 1. На сердечнике установлен подвижный якорь 8, который поворотом вокруг оси изменяет величины воздушных зазоров 9 и 10. Обмотки 2 н 3 подмагничивания включены согласно и создают постоянные магнитные потоки 11 н 12. Магнитный поток 11, создаваемый обмоткой 2, определяется как величиной воздушного зазора 10, так и значением тока обмотки 2. Обмотка 2 через выпрямительный мост 13 (фиг. 3) включена последовательно с обмоткой 5 переменного тока. Обмотка 3 через вьшрямительный мост 14 включена последовательно с обмоткой 7, .Магнитопроводы в крайних стержнях вокруг обмоток 4, 5, 6 н 7 переменного тока замкнуты. При зтом обмотки 4 и 5 между собой включены согласно. Согласно включены и обмотки 6 и 7. Обмотки 4 и 6 вместе с резисторами 15 .включены в мостовую схему измерения. Индуктивность указанных обмоток переменного тока зависит от магнитной проницаемости их магнитопроводов, а она изменяется в зависимости от величины подмагничивания этих магнитопроводов постоянным магнитным потоком- Постоянный ток обмоток 2 и 3 зависит от индуктивных сопротивлений соответстве но обмоток 5 и 7 переменного тока. Индуктивный датчик перемещений работает следующим образом. При подаче на датчик напряжения обмотки 2 и 3 создают в сердечнике 1 постоянные магннт ные потоки П и 12, которые охватьшают край ние н средний стержни сердечника и якорь. При неизменных и равных зазорах 9 н 10 обмотки 2 и 3 создают постоянное подмагничивание, величина кокфого определяется указанны ми зазорами и индукт тносгями обмоток 5 и 7. Так как в крайних стержнях сердечника происходит наложение постоянных магнитных потоков на переменные, то индуктивность обмоток 4; 5, 6 и 7 переменного тока уменьается, но зто уменьщеше индуктивности просходит в равной мере как в правом, так и левом крайних стержнях, так как воздущые зазоры 9 и 10 равны между собой и следствие ошметрин магнитопровода датчика, а выходе моста напряжение отсутствует. При неизменном напряжении U питания еременного тока с уменьшением воздушного зазора 10 возрастает постоянный магнитный оток 11 вследствие уменьшения сопротивлеия зазора 10. Увеличение потока приводит к уменьшению индуктивности обмоток 4 и 5. Так как обмотка 5 включена последовательно с обмоткой 2, то ток последней возрастает и это приводит к дополнительному увеличению постоянного магнитного потока 11. Возрастание зтого потока еще уменьшит индуктивность обмоток 4 и 5 и приведет к дальнейшему Возрастанию тока обмотки 2 и потока 11. Так будет продолжаться до установившегося процесса. С увеличением воздушного зазора 9 постоянный магнитный поток 12 обмотки 3 уменьшается, индуктивность обмоток переменного тока 6 и 7 увеличивается и ток обмотки 3 уменьшается. Это приводит к дальнейшему снижению величины потока 12, т.е. уменьшение магнитного потока будет происходить до установившегося процесса. Выходной сигнал будет определяться индуктивными сопротивлениями выходных обмоток 4 и 6 в установившемся режиме. При повороте якоря в другую сторону фаза выходного напряжения изменяется на обратную. Благодаря использованию дополннтельной обмотки в качестве положительной обратной связн в датчике сочетается собственно н дуктивный датчик перемещений и усилительное устройство. Такое сочетание позволяет избавиться от дополнительного усилителя (электронного или магнитного). Предлагаемый датчик применен для измерення углов наклона бурощнекового агрегата н может быть использован в разлнчных машинах и механизмах, работающих в условиях шахт, т.е. в условиях повышенной взрывоопасности, без генераторов высокой частоты и усилителей, обычно помещаемых в защнтную оболочку. Формула изобретения Индуктивный датчик перемещений, преимущественно, для определения наклонов, содержащий якорь, подвижный относительно Ш-образного сердечника с обмотками подмапшчиваняя и выходными измерительными обмотками, включенными в мостовую схему и размещенными
на крайних стержнях, выполненных в внде Ш-образных магнитопроводов с замыкающими накладками, ориентированных перпендикулярио плоскости сердечника, отличающийс я тем, что, с целью повышения чувствительности, на каждом из крайних стержней сердечника размещено по дополнительной обмотке переменного тока, подключенной последовательно через вьшрямительный мост к обмотке подмагничивания, располагающейся с ней на общем 2 1
Йх//
участке магнитстровода на поперечном стержне сердечника.
Источники информации, принятые во внимание при зкспертпэе
