Изобретение относится к области мапитных измерений, в частности к устройтвам дпя определения магнитных свойств материалов или изделий из них, и предназачено для контроля и автоматической. разбраковки деталей из магнитно-мягких материалов по величине коэрцитивной силы.
Известен автоматический коэрцити- метр, содержащий нуль-индикатор ( намагниченности), генератор возбуждения, формирователь прямоугольных импульсов, схему совпадения, генератор троб-импульсов, блок разрешения, блок управляющего напряжения, регулятор, сточник тока размагничивания, источник размагничивающего поля (соленоид) и цифровое отсчетное устройство tl
Недостатками данного коэрцитиметра являются: отсутствие автоматической разбраковки, значительное время измерения 20 и недостаточная точность при измерении деталей из магнитно-мягких материалов.
Наиболее близким к изобретению является коэрцитиметр, содержащий электромагнит с возбуждающей катушкой (соле- ноид для создания магнитного потока, намагничивающего и размагничивающего образец), два источника постоянного тока (один положительной, другсй отрицательной полярности) для создания намагвв-30 чивающего и размагничивающего тока в обмотке электромагнита датчик Холла для определения степени намагниченности обрайца, источник питания датчика Холла, усилитель и интегрирующую схему) 35 для усиления и окончательного формирования выходного сигнала датчика Холла, запоминающую схему для запоминания с индицированием результатов измерения и блок управления, вырабатывающий сиг- 40 налы для управления работой прибора.
В этом приборе процесс измерения коэрцитивной силы происходит автоматически, т.е. по командам блока управления 2 .45
Недостатком этого прибора является отсутствие автоматической подачи проверяемых образцов S элеменТУ| т.е. к месту измерения, отсутствие автоматической разбраковки (на годные и бракр- 50 ванные) проверенных образцов и, что самое существенное, низкая чувствительность, т.е. этот прибор не обеспечивает измерение коэрцитивной силы образцов из магнитно-мягких материалов.j.
Целью изобретения является повьщ1е- ние чувствительнсюти устройства при увеличении производительности разбраковки.
Поставленная цель достигается тем, что в устройство для разбраковки деталей из магнитно-мягких материалов по величине коэрцитивной силы, содержащее источник размагничивающего тока, источншс импульсов намагничивающего тока, выходы которых через блок коммутации связаны с обмоткой соленоида, магниточувствительный элемент в виде датчика Холла, выход которого через избирательный участок связан с амплитудным детектором, а вход - с генератором переменного напряжения, и блок управлений, связанный с источником размагничиваю- щего тока и блоком коммутации, дополнительно введены компенсатор резистивного напряжения, блок ключевой автоматической регулировки компенсации, ме-
I ханизм отбр 1ковки, механизм подачи и фиксации деталей и два пороговых блока, причем выходы блока управления дополнительно связаны с механизмом подачи и фиксации деталей, механизмом отбраковки и блоком ключевой автоматической регулировки компенсации, а выход ам1шитудного детектора через блок ключевой автоматической регулировки ком: пенсации и компенсатор резистивного напряжения связан с датчиком Холла,
при этом выходы пороговых блоков подключены к входам блока управления, вход первого порогового блока связан с источником размагничивающего тока, а
I вход второго порогового блока связан с
1 выходом амплитудного детектора.
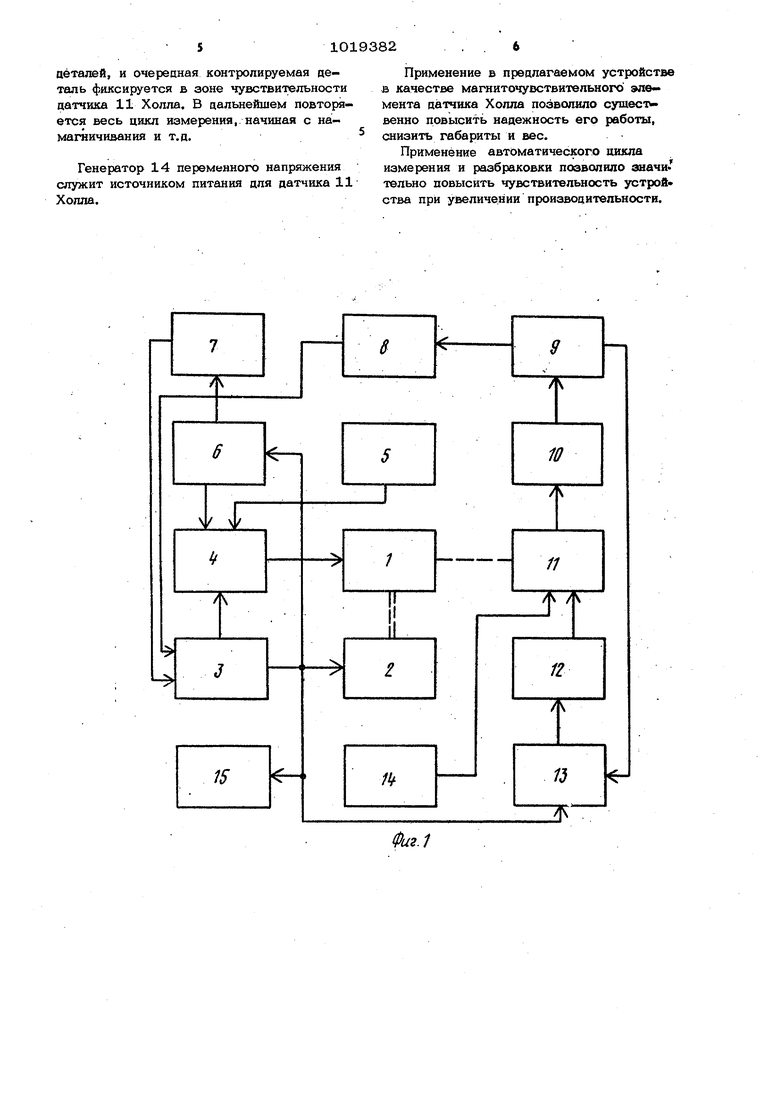
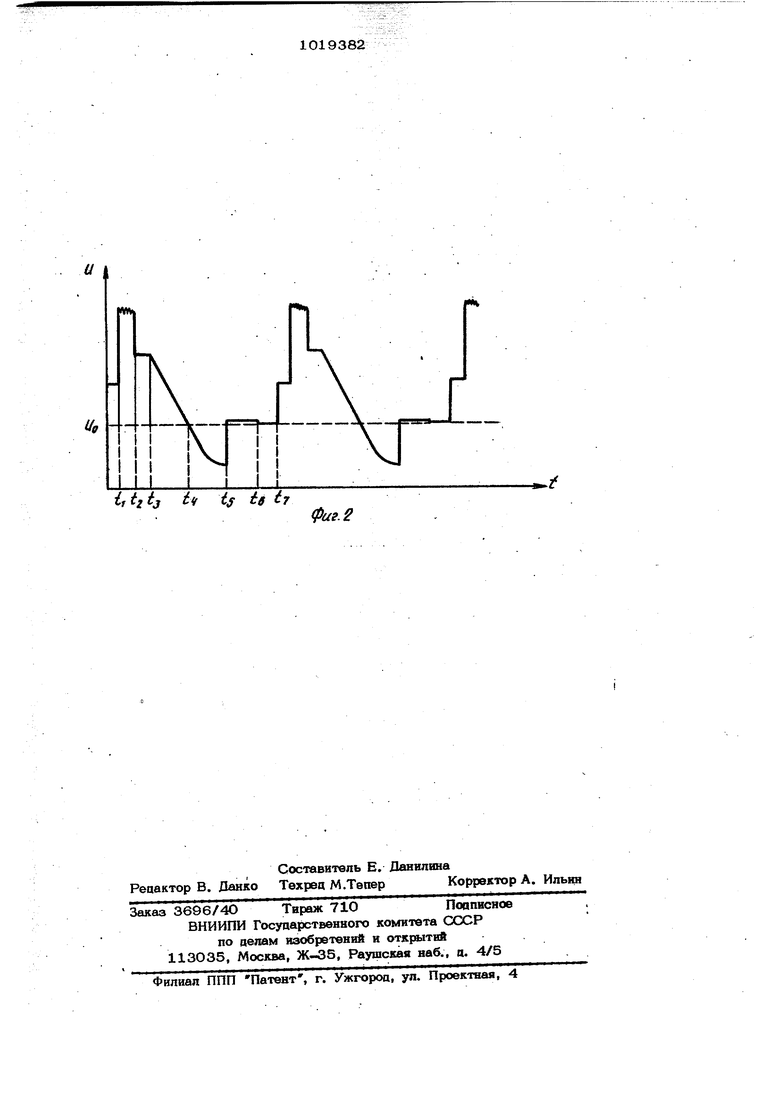
На фиг. 1 приведена структурная схем устройства; на фиг. 2 -времшная диаграмма напряжения на выходе амплитудного детектора.
Устройство содержит соленоид 1, механизм 2 подачи и фиксации деталей, блок 3 управления, блок 4 коммутации, источник 5 импульсов намагничивающего тока, источник 6 размагничивающего тока
i пороговые блоки 7 и 8, амплитудный де-
, тектор 9, избирательный усилитель 1О, датчик 11 Холла, компенсатор 12 резисторного напряжения, блок 13 ключевой автоматической регулировки компенсации,
I генератор 14 переменного напряжения и механизм 15 отбраковки.
Устройство работает следующим обра: зом.
Намагничивание и размагничивание деталей происходит в соленоиде 1, куда он поступают поочередно с помощью механизма 2 подачи и фиксации деталей, по наклонной направляющей под действием силы тяжести. После того, как механизм подачи и фиксации цеталей праал в сопеноиа 1 очерецную контролируемую деталь и зафиксировал ее в нужном положении, блок 3,управления вырабатывает сигнал, который с помсицью блока 4 коммутация подключает к соленоиду 1 источник 5 импульсов намагничивающего тока. В этот момент происходит намагничивание проверяемой детали (от момента -Ь до ЬЧ, фиг. 2). После окончания цикла намагничивания (момент fcii) с датчика 11 Холла, распо ложенного в соленоиде 1 рядом с прове ряемой деталью, снимается сигнал, ампл1 туда которого пропорциональна остаточно намагниченности детали. Данный сигнал усиливается избирательным усилителем 1 и детектируется, на выходе амплитудного детектора 9 имеется напряжение, величина которого пропорциональна остаточ- ной намагниченности детали. В следующий момент времени (момент-bj) блок 3 управления вырабатывает сигнал, который запускает источник 6 размагничивакпцего тока, ;подключенный к соленоиду 1, с помощью блока 4 коммутации таким образом, что по соленоиду 1 протекает ток, обратный по направлению току намагничивания. По мере увеличения размагничиваюшего тока уменьшается остаточная намагни ченность проверяемой детали и уменьшается сигнал, снимаемый с датчика 11 Холла, а значит и напряжение на выходе амплитудного детектора 9 также уменыиа ется. Когда напряжение на выходе ампл тудного детектора 9 уменыпается до уровня Uo (фиг. 2), соответствукядего ну левой остаточной намагаиченности контролируемой детали, срабатывает пороговый блок 8, сигнал с которого поступает в блок 3 управления (момент Ц). Дальнейшее увеличение размагничивакяцего тока вызывает небольшое перемагничивание контроли{ емаК детали и, как следствие этого, дальнейшее. уменыи ние напряжения на вькоде амплитудного детектора 9, что на процесс рения уже не влияет (от момента аоЬ), Известно, что напрвгженность магнит ного поля соленоида прямо пропорци жалы на теку, протекающему по его обмотке, т.е. коэрцитивная сила прямо пропо шич ональна току протекающему по обмотке соленоида. В процессе размагничивания ток в обмотке ооленсида 1 увеличивается, и когда он достигает величины, соотватствукшей максимально допустимой велни чине коэрцитивной силы, -срабатьшает пороговый блок 7, сигаал с которого поступает в блок 3 управления. Если коэрцитивная сила контролируемсй детали меньше максимально допустимой величины, то ее размагничивание происходит до срабатывания порогового блока 7, т.е. сигнал с порогового блока 7 поступает в блок 3 управления раньше сигнала с порогового блока 8. В этом случае блок 3 управления не вьь. рабатывает сигнал для включения механизма 15 отбраковки. Если коэрцитйвнЁШ сила контролируеf oS. детали равна или больше максимально допустимой, то размагничивание детали происходит после срабатывания порогового блока 7, т.е. сигнал с порогового блока 8 поступает в блок 3 управления позжЬ сигнала с порогового блока 7. В этом случае блок 3 управления вырабатывает сигнал для выключения механизма 15 отбраковки. В следующий момент времени (момент Ьг) блок 3 управления включает механизм 2 подачи и фиксации деталей, и, если механизм 15 отбраковки не включен, проверенная деталь поступает в тару для годных деталей, в противном случае - в тару для брака. Затем (момент тЬ) блок 3 управления отключает от соленоида 1 источник 6 размагничивающего тока и включает блок 13 ключевой автоматической регулировки компенсации, который с помощью компенсатора 12 резистивного напряжения, 1юобходимого для уменьшения (компенсации) начального (резистивного) напряжения датчика 11 Холла до величины, со№ меримой с величиной полезного сигнала, автоматически поддеркивает на выходе амплитудного детектора 9 заданный уровень напряжения ио(фиг. 2), соответствуй, щий нулевой напряженности магнитного. поля в зоне расположения датчика 11 Холла, т.е. данная автоматическая регу лировка прсжсходят в момент, когда в зоне чувствителысого датчика 11 Холла нет ксжтролируемой детали. Затем блок 13 ключевой автоматичес&0& регулировки компенсации отключается (момент Ь) в на дальнейший процесс измерения влияния не оказывает, так как компенсатор 12 резистивного напряжения сохраняет свои параметры неизменными до следующего шита автоматической регулирсшки компенсации. В тот же момент (момент Ъ-Ц отключается механизм 2 подачи и фиксации
аёталей, и очередная контролируемая деталь фиксируется Б зоне чувствительности датчика 11 Холла. В дальнейшем повторяется весь цикл измерения, начиная с намагничивания и т.д.
Генератор 14 переменного напряжения служит источником питания для датчика 11 Холла.
Применение в предлагаемом устройстве в качестве магниточувствительного эле мента датчика Холла позволило сушест венно повысить надежность его работы, снизить габариты и вес.
Применение автоматического цикла измерения и разбраковки позволило эначи тельно повысить чувствительность устройства при увеличении производительности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля деталей из магнитомягкого материала по величине коэрцитивной силы | 1989 |
|
SU1691799A1 |
| Устройство для размагничивания постоянных магнитов до заданной величины намагниченности | 1982 |
|
SU1091235A1 |
| Магнитный структуроскоп | 1983 |
|
SU1128154A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РЕЛАКСАЦИОННОЙ КОЭРЦИТИВНОЙ СИЛЫ И РЕЛАКСАЦИОННОЙ НАМАГНИЧЕННОСТИ ПРОТЯЖЕННЫХ ИЗДЕЛИЙ ИЗ ФЕРРОМАГНИТНЫХ МАТЕРИАЛОВ | 2016 |
|
RU2627122C1 |
| СПОСОБ РАЗМАГНИЧИВАНИЯ СТАЛЬНЫХ ПРУТКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339108C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОЭРЦИТИВНОЙ СИЛЫ МАГНИТНЫХ МАТЕРИАЛОВ | 2001 |
|
RU2186381C1 |
| Феррозондовый коэрцитиметр | 1979 |
|
SU855572A1 |
| СПОСОБ ЛОКАЛЬНОГО ИЗМЕРЕНИЯ КОЭРЦИТИВНОЙ СИЛЫ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ | 2011 |
|
RU2483301C1 |
| СПОСОБ ИЗМЕРЕНИЯ КОЭРЦИТИВНОЙ СИЛЫ ФЕРРОМАГНИТНЫХ СТЕРЖНЕВЫХ ОБРАЗЦОВ | 1990 |
|
RU2024889C1 |
| Размагничивающее устройство | 1991 |
|
SU1758680A1 |
УСТРОЙСТВО ДЛЯ РАЗБРАКОВКИ ДЕТАЛЕЙ ИЗ МАГНИТНОМШСИХ МАТЕРИАЛОВ ПО ВЕЛИЧИНЕ коэрцитивной СИЛЫ, содержащее размагничивающего тока, источник импульсов намагничивающего тока, выхоаы которых через блок коммутации связаны с обмотксА соленоида, магниточувствительный элемент в виде датчика Холла, выход которого через избиратель- ный усилитель связан с амплитудным детектором, а вход - с генератором переменного напряжения, и блок управления, связешный с источником размагничивающего тока и блоком коммутации, отличающееся тем, что, с целью повышения чувствительности устройства при увеличении производительности разбраковки, в него дополнительно введены компенсатор резистивного напряжения, блок ключевой автоматической регулировки компенсации, механизм отбраковки, механизм подачи и фиксации деталей и два пороговых блока, причем выходы блока управления дополнительно связаны с механизмом подачи и фвксещии деталей, механизмом отбраковки и блоком ключевой автоматической регулировки компен- сац1Ш, а выход амплитудного детектора через блок ключевой автоматической регулировки компенсации и компенсатор О) резистнвного напряжения связан с датчиком Холла, при этом выходы пороговых блоков п(Н1Ключены к входам блока управления, вход порогового блока свяа зан с источником размагннчиваюшего тока, а вход второго порогового блока связан с выходом амплитудного детектора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ измерения коэрцитивной силы | 1977 |
|
SU773543A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3697866, кл | |||
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
