ел
С

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разбраковки деталей из магнитномягких материалов по величине коэрцитивной силы | 1981 |
|
SU1019382A1 |
| Цифровой измеритель магнитной индукции | 1989 |
|
SU1709257A1 |
| Устройство для намагничивания, размагничивания и контроля напряженности магнитного поля изделий | 1986 |
|
SU1345149A1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ БОЛЬШИХ ПОСТОЯННЫХ ТОКОВ | 1995 |
|
RU2096787C1 |
| Цифровой многоинтегральный прибор для тензометрических весов | 1982 |
|
SU1030661A1 |
| Устройство для размагничивания постоянных магнитов до заданной величины намагниченности | 1982 |
|
SU1091235A1 |
| Устройство для измерения напряженности магнитных полей в дефектоскопии | 1986 |
|
SU1383194A1 |
| Стабилизатор постоянного регулируемого тока | 1990 |
|
SU1728853A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Устройство для определения намагниченности при магнитопорошковой дефектоскопии | 1985 |
|
SU1325345A1 |

Изобретение относится к магнитным измерениям, в частности к устройствам для определения магнитных характеристик образцов материалов в разомкнутой магнитной цепи. Целью изобретения является повышение точности. В первом режиме при встречном включении датчиков 2,3 Холла осуществляется компенсация разбаланса. Завершение процесса компенсации контролируется пороговым блоком 7. Во втором режиме включается блок 12 компенсации внешнего поля. В третьем режиме компенсируется нэма ниченность детали, при этом блок 14 учитывает влияние размагничивающего фактора. Синхронизация осуществляется блоком 16 управления Устройство содержит также соленоид 1, датчик 19 положения детали, блок 11 установки начального уровня, коммутатор 6, переключатели 8-10. 4 ил
Изобретение относится к магнитным измерениям, в частности к устройствам для определения магнитных характеристик образцов материалов в разомкнутой магнитной цепи.
Целью изобретения является повышение точности контроля.
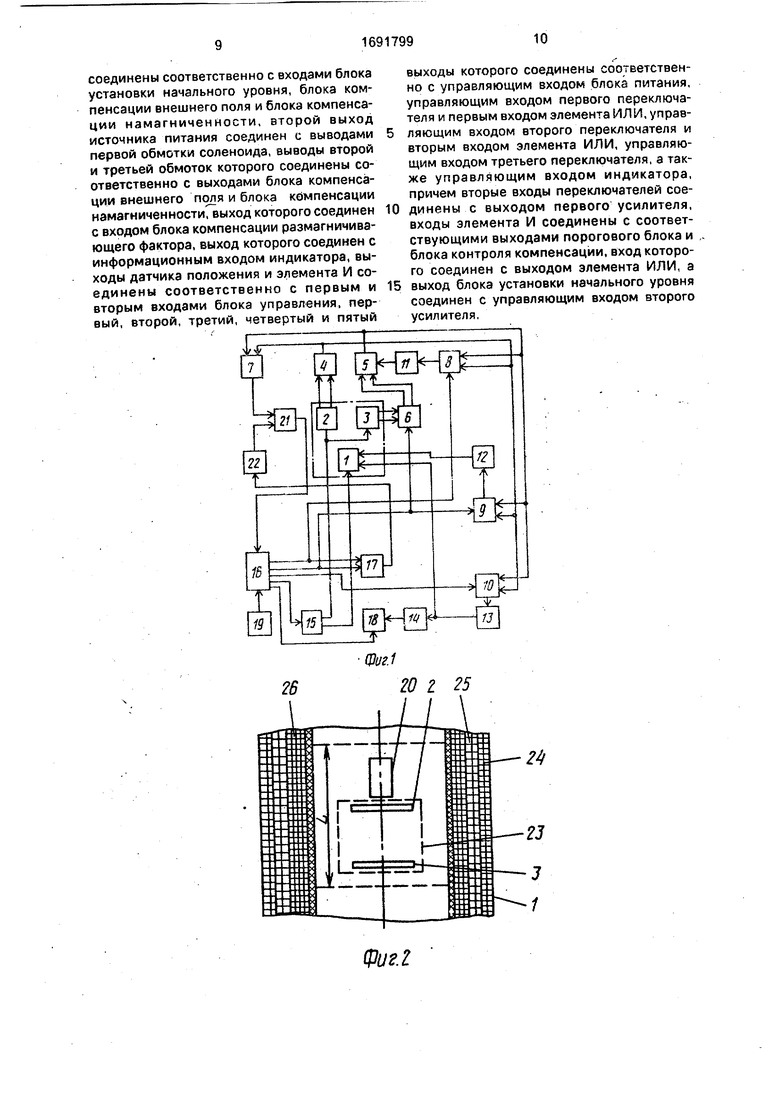
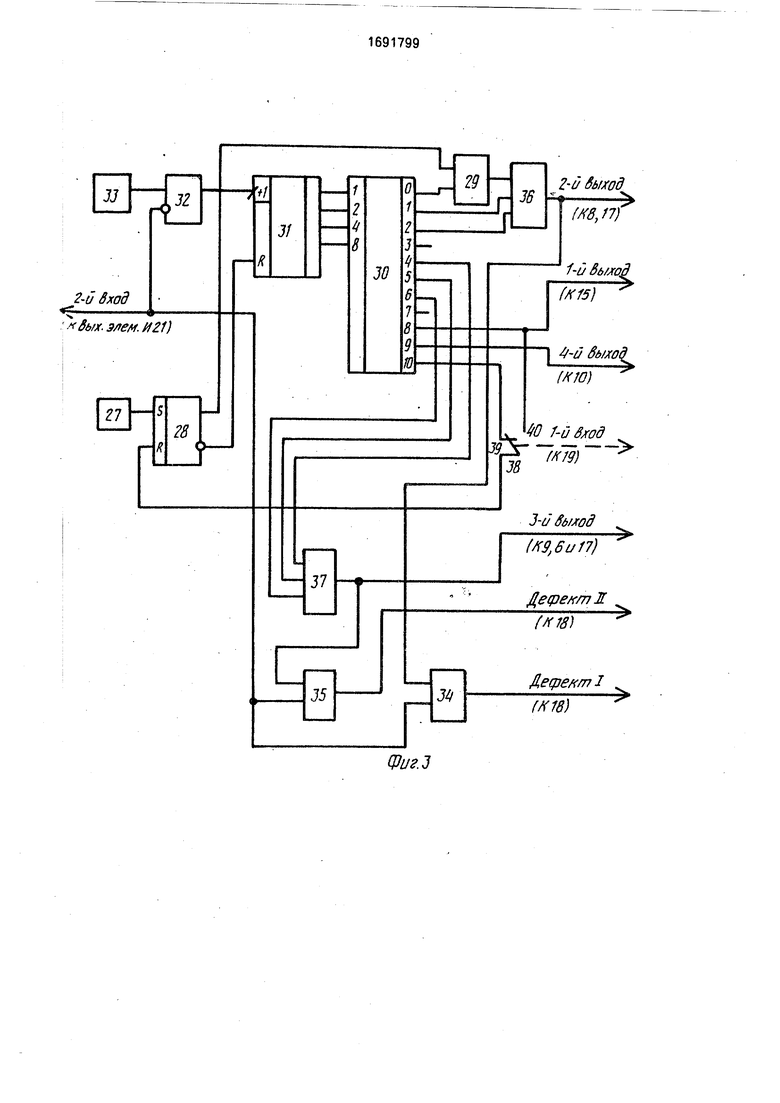
На фиг. 1 показана функциональная схема устройства; на фиг. 2 - конструкция соленоида; на фиг. 3 - схема блока управления; на фиг. 4 - диаграмма его работы.
Устройство содержит соленоид 1, в котором расположены первый 2 и второй 3 датчики Холла. Выходы первого датчика Холла 2 подключены к входам первого операционного усилителя 4 непосредственно,а выходы второго датчика Холла 3 - к входам второго операционного усилителя 5 через блок 6 коммутации. Выходы усилителей 4, 5
подключены к входам порогового блока 7 и входам первого 8, второго 9 и третьего 10 переключателей. Выход переключателя 8 подключен к входу блока 11 установки начального уровня, выход которого соединен с управляющим входом усилителя 5 Выход второго переключателя 9 подключен к входу блока 12 компенсации внешнего поля, у которого выход соединен с второй обмоткой соленоида 1. Выход третьего переключателя 10 соединен с входом блока 13 компенсации намагниченности, выход которого подключен к входу блока 14 компенсации размагничивающего фактора и к третьей обмотке соленоида 1. Первая обмотка соленоида 1 соединена с первым выходом блока 15 питания, второй выход которого подключен к датчикам Холла 2,3, а управляющий вход - к первому выходу блока 16 управления ВтоО
о
ю ю
рой выход блока 16 подключен к управляющему входу переключателя 8 и первому входу элемента ИЛИ 17. Третий выход блока 16 подключен к управляющему входу переключателя 9, управляющему входу блока 6 и второму входу элемента ИЛИ 17. Четвертый выход блока 16 подключен к управляющему входу переключателя 10. Пятый выход блока 16 подключен к управляющему входу индикатора 18, информационный вход которого подключен к выходу блока 14. Первый вход блока 16 управления подключен к выходу датчика 19 положения контролируемой детали 20, а второй вход - к выходу элемента И 21, у которого первый вход подключен к выходу блока 7, а второй вход - к выходу блока 22 контроля компенсации, вход которого соединен с выходом элемента ИЛИ 17.
Датчики Холла 2,3 размещены внутри соленоида 1 параллельно друг другу в общей теплопроводящей обойме 23 в зоне однородного поля перпендикулярно оси соленоида 1 с возможностью поступательного перемещения второго датчика Холла 3 относительно первого датчика Холла 2. Соленоид 1 выполнен с обмотками 24, 25, 26.
Блок 16 управления содержит генератор 27 циклов измерения, выход которого подключен к входу установки в единицу триггера 28. Прямой выход триггера 28 подключен к первому входу двухвходового элемента И 29, второй вход которого подключен к выходу Нуль дешифратора 30. Входы дешифратора 30 подключены к выходам двоичного счетчика 31, у которого вход установки в нулевое состояние соединен с инверсным выходом триггера 28, а счетный вход соединен с выходом элемента И (Запрет) 32. Прямой вход элемента 32 подключен к выходу генератора 33 тактовых импульсов, а инверсный вход элемента 32 подключен к первым входам элементов И 34, 35 и является вторым входом блока 16 управления. Второй вход элемента И 34 соединен с выходом трехвходового элемента ИЛИ 36, являющегося вторым выходом блока 16. Второй вход элемента И 35 соединен с выходом трехвходового элемента ИЛИ 37, являющимся третьим, выходом блока 16. Первый вход элемента ИЛИ 36 подключен к выходу элемента И 29, второй вход элемента ИЛИ 36 подключен к выходу Один дешифратора 30, а третий вход элемента ИЛИ 36 подключен к выходу Два дешифратора 30. Первый вход элемента ИЛИ 37 подключен к выходу Четыре дешифратора 30, второй вход элемента ИЛИ 37 подключен к выходу Пять дешифратора 30, а третий вход элемента ИЛИ 37 подключен к выходу Шесть дешифратора 30. Выходы элементов И 34, 35 являются пятым выходом блока 16, при этом выход элемента И 34 управляет индикатором Дефект I, а выход элемента И 35 управляет индикатором Дефект II.
Четвертым выходом блока 16 является выход Девять дешифратора 30, а первым выходом блока 16 является выход восемь дешифратора 30. Первым входом блока 16 является привод переключающего контакта
0 38, связанный с датчиком 19 положения детали 20. При наличии детали 20 в соленоиде 1 контакт 38 замкнут с контактом 39, соединенным с выходом Десять дешифратора 30, а при отсутствии детали 20 в соленоиде
5 1 контакт 38 замкнут с контактом 40, соединенным с выходом Восемь дешифратора 30. Переключающий контакт 38 подключен к входу установки в Нуль триггера 28. Устройство работает следующим обра0 зом.
Длительность цикла измерения задается периодом выходных импульсов генератора 27. В исходном состоянии до появления выходного импульса генератора 27 триггера
5 28 установлен в состояние Нуль. При этом счетчик 31 сигналом единица с инверсного выхода триггера 28 установлен в состояние нуль, на выходе Нуль дешифратора 30 имеется сигнал единица, на остальных
0 выходах дешифратора 30 и на всех выходах блока 16 - сигналы нуль.
При появлении выходного импульса генератора 27 длительностью порядка 1 мкс триггер 28 переводится в состояние едини5 ца, в результате чего на выходе элемента И 29 и, таким образом, на выходе элемента ИЛИ 36, являющегося вторым выходом блока 16, появляется сигнал единица. Кроме того, с этого момента подается сигнал
0 нуль на вход установки в нулевое состояние счетчика 31, который начинает производить подсчет выходных импульсов генератора 33 тактовых импульсов, поступающих на счетный вход счетчика 31 через
5 элемент 32, у которого на инверсный вход в этом случае подан сигнал нуль. Период импульсов генератора 33 выбирается из расчета обеспечения необходимой длительности выходных сигналов блока 16, у кото0 рого выходные сигналы ранвы или кратны по длительности периоду импульсов генератора 33. В рассматриваемом примере сигналы на втором и третьем выходах блока 16 равны по длительности трем периодам им5 пульсов генератора 33, а сигналы на первом и четвертом выходах блока 16 равны по длительности одному периоду импульсов генератора 33.
Таким образом, в течение длительности первых трех периодов импульсов генератоpa 33, т.е. в течение времени, когда сигналы единица будут последовательно появляться на выходах Нуль, Один, Два дешифратора 30, на втором выходе блока 16 выдается сигнал единица, а все остальное время - сигнал нуль. В течение длительности периодов пятого, шестого и седьмого импульсов генератора 33, т.е при последовательном появлении сигналов единица на выходах Четыре, Пять, Шесть дешифратора 30, выдается сигнал единица на третьем выходе блока 16 (на выходе элемента ИЛИ 37). В течение длительности периода девятого импульса генератора33(при наличии сигнала единица на выходе Во семь дешифратора 30) выдается сигнал единица на первом выходе блока 16. В течение длительности периода десятого импульса генератора 33 (при наличии сигнала единица на выходе Девять дешифратора 30) выдается сигнал единица на четвертом выходе блока 16.
В момент появления заднего фронта десятого импульса генератора 33 появляется сигнал единица на выходе Десять дешифратора 30, который устанавливает в состояние нуль триггер 28. В результате этого подается сигнал единица на вход установки в нулевое состояние счетчика 31, и схема блока 16 устанавливается в исходное состояние, в котором удерживается до прихода очередного импульса генератора 27.
В случае отсутствия измеряемой детали 20 в соленоиде 1 переключающий контакт 38, который управляется датчиком 19, является замкнутым с контактом 40, а не с контактом 39, в результате чего в момент появления сигнала единица на выходе Восемь дешифратора 30 схема блока 16 устанавливается в исходное состояние и описанные выше сигналы единица на первом и четвертом выходах блока 16 не выдаются.
В случае неосуществления компенсации разбаланса усилителей или внешнего магнитного поля, т.е. при поступлении сигнала единица на второй вход блока 16, прекращается прохождение импульсов генератора 33 через элемент 32 на счетный вход счетчика 31, В этом случае счетчик 31 и, таким образом, дешифратор 30 останавливаются и находятся в таком состоянии, которое соответствует накопленному счетчиком 30 количеству импульсов генератора 33, при котором выявилось неосуществление компенсации. При этом, если неосуществление компенсации выявилось при наличии сигнала единица на втором выходе блока 16, появляется сигнал единица на
выходе элемента И 34, а, если неосуществление компенсации выявилось при наличии сигнала единица на третьем выходе блока 16, то появляется сигнал единица на выходе элемента И 35 Появление сигнала единица на выходе элемента И 34 или выходе элемента И 35 приводит к высвечиванию на блоке 18 индикации соответственно сигнала Дефект I или сигнала Дефект II.
0 Рассмотрим работу остальных блоков устройства.
При включении устройства, когда в соленоиде 1 отсутствует деталь 20, блок 16 устанавливается в первый режим - компен5 сации разбаланса операционных усилителей 4, 5. В этом режие блок 6 установлен в состояние, обеспечивающее последовательное встречное включение датчиков Холла 2,3, при котором последние не реагируют
0 на внешнее однородное магнитное поле. При этом сигналы на входах усилителей 4. 5 отсутствуют и появление сигналов на выходах усилителей 4, 5 свидетельствует о наличии резбаланса. В указанном первом
5 режиме блок 16 выдает на втором выходе сигнал логической единицы длительностью порядка 200-300 мс, открывающий переключатель 8. При разбалансе усилителей 4,5 сигналы с выходов усилителей 4, 5 с необхо0 димой полярностью поступают на вход блока 11, автоматически вырабатывающего сигнал смещения усилителя 5, необходимый для компенсации разбаланса, и поддерживающего его на заданном уровне в течение
5 всего цикла измерения.
Контроль за выполнением компенсации осуществляет блок 7, на входы которого поступают сигналы с выходов усилителей 4, 5. На выходе блока 7 будет сигнал логической
0 единицы при наличии на его входах напряжений любой полярности, превышающих порог срабатывания. Выходной сигнал блока 7 подается на первый вход элемента И 21, на второй вход которого подается сигнал с
5 выхода блока 22, вырабатывающего сигнал логической единицы длительностью порядка 10 мс по истечении интервала времени, равного 90% от длительности управляющего импульса (логической единицы), который
0 выдает блок 16 на втором и третьем выходах. Если компенсация за указанное время почему-либо не осуществляется, то на выходе элемента И 21 появляется сигнал единица, поступающий на второй вход блока 16.
5 При этом блок 16 выдает сигнал на индикатор 18, который сигнализирует о том,что компенсация не осуществлялась (высвечивает сигнал Дефект I).
После выработки сигнала единица на втором выходе блока 16 и осуществлении
компенсации разбаланса блок 16 переходит во второй режим, при котором сигнал логической единицы такой же длительности, как и в первом режиме, вырабатывается на третьем выходе блока 16. При этом устройство переходит в режим компенсации внешнего поля, в котором сигнал с третьего выхода блока 16 открывает переключатель 9 и переключает коммутатор 6 в положение, соответствующее последовательному включению первого 2 и второго 3 датчиков Холла. Сигнал, снимаемый с датчиков Холла 2, 3, который определяется величиной и направлением внешнего однородного магнитного поля, через усилители 4, 5 поступает на блок 12, который обеспечивает в первой обмотке 24 соленоида 1 ток трубемой полярности, компенсирующий внешнее поле. Контроль компенсации осуществляется так же, как и в первом режиме. При отсутствии компенсации на блоке 18 высвечивается сигнал Дефект II.
Если деталь 20 в соленоиде 1 отсутствует, то первый и второй режимы повторяются, чередуясь.
При помещении в соленоид 1 детали 20 датчик 19 положения выдает сигнал, поступающий на первый вход блока 16, который при условии осуществления компенсации разбаланса усилителей и компенсации внешнего поля, выдает на первом выходе сигнал, по которому с блока 15 питания выдается импульс намагничивания в первую обмотку 24 соленоида 1. Так как сигнал единица на втором выходе блока 16 отсутствует и блок 6 находится в положении, обеспечивающем последовательное встречное включение датчиков Холла 2, 3, то по окончании действия намагничивающего импульса неоднородное магнитное поле, создаваемое остаточной намагниченностью детали 20, наводит в датчиках Холла 2, 3 ЭДС, пропорциональную остаточной намагниченности детали 20,
После окончания действия намагничивающего импульса блок 16 на своем четвертом выходе выдает сигнал, который открывает третий переключатель 10, в результате чего сигналы с выходов усилителей 4, 5, пропорциональные ЭДС датчиков Холла, поступают в блок 13. Блок 13 по сигналу блока 16 обеспечивает в третьей обмотке 26 соленоида 1 ток, необходимый для создания магнитного поля, размагничивающего деталь 20. Кроме того, сигнал с выхода блока 13 поступает в блок 14. Блок 14 осуществляет масштабное преобразование величины тока в зависимости от величины размагничивающего фактора (внутреннего поля, размагничивающего деталь 20) и его выходной сигнал поступает на индикатор 18, програ- дуированный в единицах величины коэрцитивной силы, по которому производится отсчет.
При удалении детали 20 из соленоида 1 весь цикл повторяется и через 400-600 мс устройство готово к измерению коэрцитивной силы следующей детали.
Экспериментальное исследование показало, что по сравнению с известным устройством аналогичного назначения предлагаемое устройство обеспечивает
более высокую точность измерения и возможность существенного расширения диапазона размеров контролируемых деталей. Например, при контроле деталей с соотношением длины и сечения от 0,3 до 20, погрешность измерения не превышает 1%, в то время как погрешность известного устройства составляет 10%. Это достигается за счет компенсации размагничивающего фактора, влияния помехонесущих полей, обеспечения контроля только при условии компенсации. Подвижность второго датчика Холла позволяет выбрать оптимальное его расположение относительно контролируемой детали,
Формула изобретения
Устройство для контроля деталей из магнитомягкого материала по величине коэрцитивной силы, содержащее блок питания, первый выход которого подключен к
входу питания первого датчика Холла, выходы которого подключены к входам первого усилителя, выход которого подключен к первому входу порогового блока, блок компенсации намагниченности, блок установки
начального уровня, блок управления, блок коммутации и соленоид, отличающееся тем, что, с целью повышения точности контроля, оно снабжено датчиком положения детали, индикатором, блоками компенсации размагничивающего фактора и внешнего поля, тремя переключателями, элементами И и ИЛИ, блоком контроля компенсации, вторым усилителем и вторым датчиком Холла, размещенным параллельно
первому датчику Холла и перпендикулярно осы соленоида с возможностью поступательного перемещения относительно первого датчика Холла, при этом первый выход источника питания подключен к входу питания второго датчика Холла, выходы которого соединены с входами блока коммутации, выходы которого соединены с входами второго усилителя, выход которого соединен с вторым входом порогового блока и первыми входами переключателей, выходы которых
соединены соответственно с входами блока установки начального уровня, блока компенсации внешнего поля и блока компенсации намагниченности, второй выход источника питания соединен с выводами первой обмотки соленоида, выводы второй и третьей обмоток которого соединены соответственно с выходами блока компенсации внешнего поля и блока компенсации намагниченности, выход которого соединен с входом блока компенсации размагничивающего фактора, выход которого соединен с информационным входом индикатора, выходы датчика положения и элемента И соединены соответственно с первым и вторым входами блока управления, первый, второй, третий, четвертый и пятый
выходы которого соединены соответственно с управляющим входом блока питания, управляющим входом первого переключателя и первым входом элемента ИЛИ, управляющим входом второго переключателя и вторым входом элемента ИЛИ, управляющим входом третьего переключателя, а также управляющим входом индикатора, причем вторые входы переключателей соединены с выходом первого усилителя, входы элемента И соединены с соответствующими выходами порогового блока и блока контроля компенсации, вход которого соединен с выходом элемента ИЛИ, а
выход блока установки начального уровня соединен с управляющим входом второго усилителя.
Фиг.
JJ
V/
31
2-й Вход
«8ь/х..И2П
8
Т
37
29
36
2-й выход
№8,17)
30
1-й Вь/м
frfS)
од
I
4-й выт
I
(КЮ)
f/fla
38
IK т
3-й вылод
(/f9,6 и 17)
Десрех/п Ж
34
Дефек/я1
(/(18)
Фиг.З
| Устройство для разбраковки деталей из магнитномягких материалов по величине коэрцитивной силы | 1981 |
|
SU1019382A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
