Изобретение относится к технической кибернетике и может быть использован ;В системах регулирования объектакм, параметры которых - нейзйёстНые пос|тоЯ:Нные. или медленно меняющиеся. во времени величины. Такими системами . являются, например, системы автомати ческого управления летательными ап- .паратами, ядерными реакторами, гидромелиоративными сооружениями и т.д. Известно устройство для автомарического управления объектами при наличии случайных возмущений, содержащее узел сравнения, блок коммутиру емых коэ.ффициёнтов, объект ретулйровакия, дифференцирующее.звено, сумма тор, квадратор Г1Д. . Недостатками данного устройства являютсй малая точность при изменении параметров объекта в широких пределах, невозможность работы с .объектами per гулрГрования, порядок которых превы шает второй, . / , Известна также гамонастраивающая.ся система с эталонной моделью, содержа1 1ая регулятор с переменным коэф Фициентом регулирования, первое срав нивающее устройство, объект регулирования, эталоиную .модель. Второе срдвнивающее устройство, усилитель постоянного тока, квадратичный детектор, корректирующий фильтр {21, : .Недостатками такой системы явля-. ется трудность реализации эталонной .модели объекта регулирования при изтмененйи параметров объекта в широких -пределах, малая точность в. работе при изменении парамеа-ров объекта в щироких .пределах, ; Наиболее близким к предлагаемому техническим решением являете аяа,п:дивная система стабнодзации, содвржащая объект регулированияЕ, .блоки задания коэффициентов, сумматор умножители интеграторы, регулятор Сз, : Эта система обеспечивает асимпто. тич;ескую устойчивость по-ложения равновесия при изменении параметров объекта в широком диапазоне, однако она :Обл адает сложносты конструкции, так как-при построении систем необходи:мо m интеграторов и m улшоясителей, .где :1пг|--.количество выходов объекта рбгулиррвания, а необходим регуля. 0рук6т,орый осуществляет умножение . си.гнала от i-ro интегратора на сигнал рт 1-го выхода объекта-регулирования, а ./затем производит суммирование получай ныхпроизведений,,е, на выходе регУля-: тор получается сигнал, равный.: .t-v. .где Vi- сигнал с i-ro вы -.. ..134 j . -. , «-йОДа/йВБекта регулирования С|- - Ьигнал :с выхода -i-ro интегратора. ; Цель изобретения - упрощение систекы - Поста влённая цель достигается тем,-что в системе, содержащей блок задания коэффициентов/ последовательно соединенные, блок суммирования, первый умножитель, интегратор, второй умножитель, объект регулирования,, выходы которого соединены с соответствующими входами блока задания коэффициентов , входы блока суммирования подключены к соответствующим выходам блока задания коэффициентов, дополнительно выход блока суммирования подключен к вторым входам первого и второго умножителей.. На чертеже представлена блок-схема системы. Система содержит объект 1 регулирования, блок 2 задания коэффициентов, блок 3 суммирования, первый умножитель 4, интегратор 5, второй умножитель 6, /,.., hi выходы объекта регулирования, и - скалярное управляющее воздействие, удовлетворяющее уравнению ,)/ (i, . где, - m .- мерный вектор коэффициен тов блока 2 задания коэффициентов, выбираемый из условия (A)- гурвидевый квазиполином степени п-Г с положительным старшим коэффициентом (ot( числитель передаточной функции объекта регу лирования)-, -tn - мерный вектор выходных координат объекта. Выбирая функцию Ляпунова в виде V(x,,x-i-(3 L-3to)4. (2); где X - п - мерный вектор состояния .. объекта) О - положительно-определенная симметричная матрица размерности (пп); Ь о - число, можно по.казать, что реализуемый алгоритм настройки: . . 3e ct()2, (3) где - число. Обеспечивает асимптотическую устойчивость системы. Система функционирует, следующим образом, Сигналы с вьдходов обтье1кта 1 регулирование поступают на соответствуюцие входы блока 2 задания коэффици-. евтов,. который представляет собой блок умножит.елей. В блоке 2 за-, задания коэффициентов происходит умножёние сигналас 4-г6 выхода объекта регулирования на постоянный коэффициент:. Сигйалы с выходов блока 2 задания коэффициентов поступают на соответетйуквдие входы блока 3 суммирования где складываются. Сигнал с выода Йяока 3 суммирования приходит на первый вход которого умножителя 6 на оба входа первого умножителя 4, 10194 Б первом умножителе 4 происходит умножеиие сигнала е выхода блока 3 суммирования на этот же сигнал. Сигнал с выхода первого умножителя 4 поступает ка вход интегратора 5, где интегрируется. Сигнал с выхода инте:гратора 5 поступает иа второй вход второго умножителя 6. Во втором ум- , -ножителе.6 происходит умножение сигнала с выхода блока 3 суммирования 00 на сигнал с выхода интегратора 5, Сигнал с выхода второго умножителя б (управляющее воздействие ) поступаг ет на вход объекта.1 регулирования, . . Таким образом, гфедлагаемое подключекие выхода блока суммирования позволяет обеспечить асимптотическую устойчивость при существе иной у ripoиении системы.
САМОНАСТРАИВАКЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ, содержащая блок задания коэффициентов, последовательно соединенные блок суммирования, первый . ; умножитель, интегратор, второй умножитель , объект регулирования, выходы {которого соединены с сортвётствуюгщими входами блока задания коэффициентов, входы блока суммирования подключены к соответствующим выходам блока задания коэффициентов, отличающаяся тем, что, с целью упрощения системы, выход блока суммирования подключен к вторым входам первого и, второго умножителей.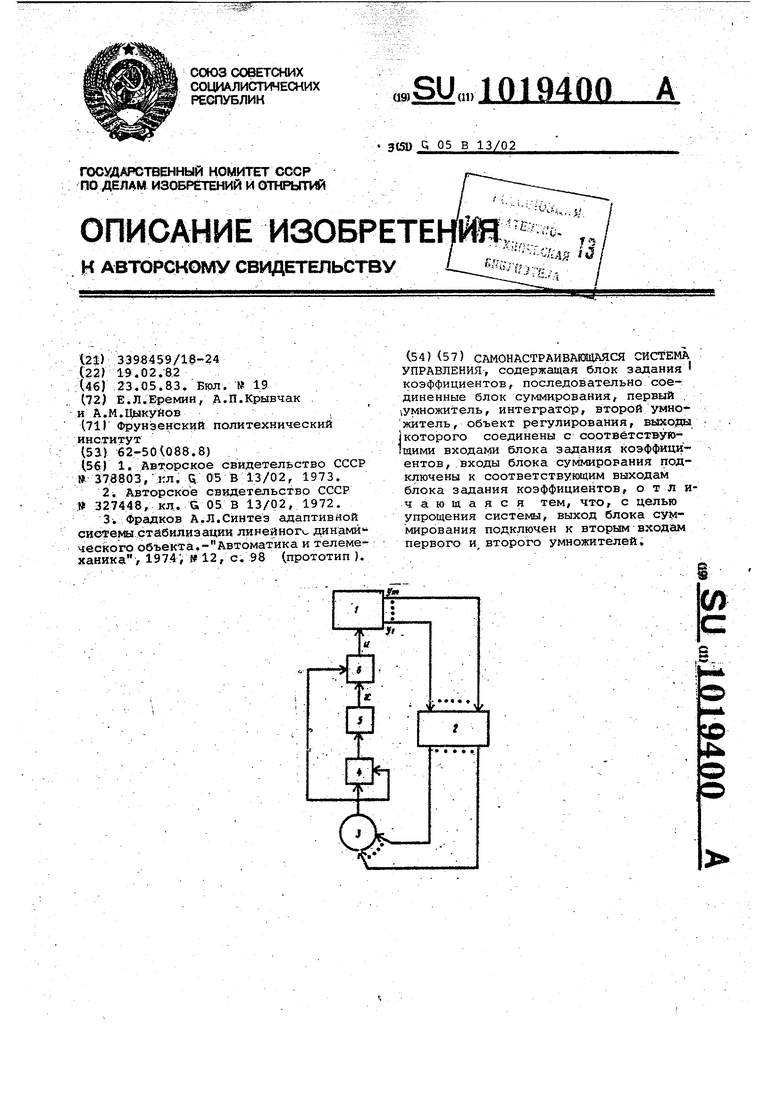
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОБЪЕКТАМИ ПРИ НАЛИЧИИ СЛУЧАЙНЫХ ВОЗМУЩЕНИЙ | 0 |
|
SU378803A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА С ЭТАЛОННОЙ МОДЕЛЬЮ | 0 |
|
SU327448A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
