Изобретение относится к сельскому хозяйству и может применяться на дождевальных машинах кругового и фронтального действия для обеспечения заданной программы полива, а также для совершенствования техники полива. Известна система управления стационарной автоматической установкой, обеспечивающей индивидуальную программу полива участков установки причем переключение времени их вклю чения осуществляется схемой памяти ЭВМ и запрограммированной логической последовательностью Cl. Недостатками.этой системы являются сложность и невозможность ее использования на передвижных дождевальных машинах в связи с переменной скоростью движения , обусловленного проскальзыв.анием, изменением давления воды в машине, движением по местности с уклонами и др. Известно также устройство управления дождевальной мадшны, включающее регулятор скорости дождевальной машины и открытия дождевальных аппаратов, датчики скорости и положения дождевальной машины на поле и блокзадания программы полива С23, Недостатком этого устройства является ухудшение качества полива вследствие неточности управления по скоростей из-за накопления ошибок измерения скорости управляющего колеса и неравномерности расхо ной характеристики при движении маш ны по неровностям влажного поля. Цель изобретения - улучшение качества полива путем повышения точности управления по скорости и устранения неравномерности расходной характеристики, машины. Указанная цель достигается тем, что устройство управления снабжено последовательно соединенными блоком привязки положения машины и блоком совпадения, подключенным к регулятору скорости машины и открытия дож девальных аппаратов, причем датчик скорости выполнен в виде датчика количества ходов колеса дождевально машины, датчики скорости и положения дождевальной машины подключены к входам блока привязки, а блок задан программы полива включает таймер и подключен к второму входу блока сов падения, , На чертеже .показана блок-схема программного устройства управления дождевальной машиной, установленног на дождевальной машине фронтального или кругового действия. Датчик 1 количества ходов колеса машины соединен с блоком 2 привязки положения машины к орошаемому полю, к которому также подсоединен датчик 3 положения машины на местности. Выходы блока-2 и блока 4 задания программы полива через блок 5 совпадения соединены с регулятором 6 скорости движения машины и открытия дождевальных аппаратов. Датчик 1 количества ходов колёса машины изготавливается по известным схемам, например, путем установки серийного магнитогерконового датчика положения на толкатель рабочего колеса машины или спицы ведущего колеса машины, фронтального действия. Блок 2 привязки машины содержит реверсивный счетчик количества ходов машины и схему коррекции ходов движения машины после прохождения фиксированных участков, когда изменяющееся количество ходов между фиксированными участками, например, при буксовании или неравномерном проскальзывании, заменяется на принятую среднюю величину ходов движения машины. Датчик 3 положения машины содержит известные устройства, обеспечивающие выработку двоичных сигналов после прохождения машиной фиксированного пути, и может быть выполнено, например, для машины кругового действия путем установки на неподвижной опоре кольца радиусом 1,5 м с установкой на нем через 1 см 470 ферромагнитных экранов для управления датчиком фиксации положения мапшны, на местности, например магнитогерконовым, установленным на подвижном колене машины, что соответствует б м перемещения концевой тележки. Для машин фронтального действия аналогичные .или контактные переключатели могут быть установлены на контрол1,нык . вешках, установленных на фиксированных участках поля, на направляю- . щем проводе машины или на оросителе. Блок 4 задания програкмы полива содержит логические устройства, поз-. воляющие осуществлять управление работой- машины от датчиков влажное- ; ти поля, прием программы полива по телемеханическим каналам, задания программы полива через перфокарту, получаемую от центральной ЭВМ или панель местного набора програмьм полива. Для реализации чередующихся освежительных и увлажнительных поливов в дневное и ночное время с привязкой их на местности блока 4 содержит электронные часы (таймер) местного времени устройства памяти предыдущих .ходов машины и участков поля, на которых осуществлен освежительный или увлажнителвный полив. На выходе блока 4 задаются следукмдие параметры: номера участков или дождевальных аппаратов, соответствуюие ходам движения машины, норма полива и алгоритм чередования севежительных и увлажнительных поливов, привязанный к номерам ходов движения машины и местному времени.
Блок 5 совпадения содержит цифровые логические устройства, обеспечивающие сравнение сигналов блока задания программы полива 4 с количеством ходов движения машины, поступающим от блока 2 и при их совпадении, логические устройства блока совпадения рассчитаны на выработку соответствунмдей команды на изменение положений регулятора скорости переключение или регулирование дождевальных аппаратов или соответствующего изменения выдержки времени остановки машины при старт-стопном режиме работы. Поддержание равномерной нормы полива на участках обеспечивается блоком регулятора скорости движения машины и управления дождевальны1 о{ аппаратами 6, каящый содержит блок управления, связанный с блоком 5 совпадения, и исполвиггельных механизм, например электрогидравлическйй клапан или регуляjTop скорости движения ведущей тележки машины,или магнитный пускатель для включения электродвигателя ведущей тележки MaicoBHu. Изменение длительности времени открытия гидравлического клапана или положения регулятора сксфости движения ведущей тележки машины или изменение времени включения магнитного пускателя при старт- . СТС1ПНОМ режиме работы машины Кубань по командам, формируе. мым блоком 5 совпадения, позволяют оперативно и точно изменять норму расхода машины или, при не |0бходимости, каждого дождевальноjro аппарата в соответствии с задан- ной программой.
Устройство работает следуюгдам образом.
При движении машины осуществляется непрерывная фиксация количества ходов машины между фиксированными участками и после их прохождения при этом осуществляется замена реального количества ходов заранее установленным. Таким образом, при движении машины независимо от проскальзывания рабочих колес и неравнокерности хода ошибка в разделении всего орошаемого поля на условi oe количество ходов не накапливается. Это количество ходов иСпол ьзует ся в программном устройстве для однозначного определения положения машины на поле и точной реализации любой программы полива машины вплот до отдельного дождевального аппарат
Необходимо осуществить чередуюпшся дневной освежительный и ночной увлажнительный поливы на машине Фрегат модификации ДМУ-Б на местности с уклоном ,057, где полный оборот машины соответствует 18330 ходов гидроцилинда а или 15,5 см на 1 ход. В .связи с передвижением серийной машины на местности с уклонами и неравномерной пробуксовкой колес среднее количество ходов машины точно не выдерживается и по количеству ходов невозможно точно зафиксировать положение машины на мест0ности, невозможно также по количеству ходов машины отметить планиду освежительного и увлажнительного полива. При задержках машины в связи с ремонтом сбивается время дневного и ночного полива. Возможен
5 полив одного и того же участка поля, например, только увлажнительным по-
ЛИВОМ.
Использование предлагаемого устройства позволяет осуществить все
0 ати операции с заданной точностью автоматическим устройством. Для этого все орошаемое поле по кругу разбито на 18330 ходов гидроцилиндра машины и 15 секторов, на каждый
5 сектор приходится 1222 хода гидроцилиндра.. В датчике 3 положения установлено 470 ферромагнитных экранов, что соответствует 6 м перемещения кольцевой тележки машины.
0
В блоке задания програмквл полива 4 набирают программу полива, например, на перфокарте «ли с местной панели путем задерни и нормы полива 1222 хода гидаюцилиндра ночью
5 поливают увлажнительным поливом с нсфмой 600 , а 3630 ходов гидроцилиндра поливают с 200 м Vra так, чтобы в цепом на 15 фиксированпвых участках поля за 15
0 дней осуществлялся полный равномерный полив поля увлажнительшл«в1 вормгиии. Мгноину включают в работу, при этом контролируют соответствие тсоли чества ходов машиш заданной иорме
5 полива путем Heiipei iBHoro счета количества кодов гидроцилиндра машины датчиком количества ходов колеса,, сигналы которого через блок 2 привязки поступают в блок 5 совпадения, сравниваются с заданной программой
0 :от блока 4 и ш рабатывается необходимая выдержка времени остановки машины, например, после прохождения 20 ходов, обеспечивакщая заданную норму полива. Регулирование выдержки
5 времени остановки мгшины или из1юиег ние положения крана-згшатчика око- . рости, отрабатываемое блоком регулятора б скорости движения и открытия дождевальных аппаратов, позволяет
0 обеспечить заданную но{шу полива
После прохождения концевой тележки 6 м срабаты;вает магиитогерконовый датчик 3 положения машины на местности, его сигнал поступает в блок 2 ПРИВЯЗКИ количества ходов движения
5 Машины по орошаемому полю и независимо от проскальзывания ведущих колес машины и изменчивости количест ва ходов на фиксированном участке на счетчике блока 5 происходит замена реального количества ходов на условно принятое для фиксированного участка количества ходов - 39, одно временно со сменой реального количества ходов на условное блоком 5 осуществляется коррекция времени ос тановки мшиины для обеспечения зада ной нормы полива. При последующем прохождении фикс вованных участков цикл работы Уст ройства повторяется до 1222 хода на секторе смены увлажнительной нрр УМы полива на освежительную, ь этом случае на блок совпадения, например поступает три сигнала - участок 122 время 8.00 и сигнал несоответствия , нормы, полива .при следующем ходе машины. При этом блок 5 совпадения определяет новую выдержку времени остановки машины меядцу циклами движения, соответствующую освежительной норме полива, или выбирает новое |положение регулятора скорости. Если в процессе ночной работы произошла остановка машины и к 8-ми часам машина не закончила цикл увлажнительного полива, Т.О в блоке совпадения не будет осуществлено переключение на освежительный полив, пока не соь падет номер хода машины 1222. Запас производительности машины позволяет устранить это несоответствие ,и заданная программа полива будет выполнена. Аналогичным образом осуществляется любая программа полива отдельных участков поля и даже отдельного хода машины и ее участка вдоль машины. . Эффективность работы предлагаемого устройства управления Машиной заключается в автоматическом выполнении любой программы полива с заданной точностью, что обеспечивает качество полива, устраняет необходимость постоянного присутствия операторов на дождевальной мшаине и позволяет совершенствовать технику,, полива. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор скорости движения дождевальной машины | 1981 |
|
SU1090296A1 |
| Устройство программного управления дождевальной машиной кругового действия | 1982 |
|
SU1130277A1 |
| Способ полива | 1986 |
|
SU1471993A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ АВТОМАТИЗИРОВАННАЯ ОРОСИТЕЛЬНАЯ СИСТЕМА С НИЗКОНАПОРНЫМИ ДОЖДЕВАЛЬНЫМИ МАШИНАМИ КРУГОВОГО ДЕЙСТВИЯ | 2009 |
|
RU2402199C1 |
| СПОСОБ МЕЛИОРАЦИИ И УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛИВОМ | 2007 |
|
RU2355162C1 |
| Система регулирования влажности почвы | 1981 |
|
SU1021434A1 |
| Автоматизированная система управления бороздковым поливом | 1986 |
|
SU1329687A1 |
| Способ полива | 1980 |
|
SU904597A1 |
| Система управления многоопорной дождевальной машиной кругового действия | 1989 |
|
SU1665977A1 |
| УСТРОЙСТВО ДЛЯ ДИФФЕРЕНЦИРОВАННОГО УПРАВЛЕНИЯ ОРОШЕНИЕМ ПОСЕВОВ С ОДНОВРЕМЕННЫМ ВНЕСЕНИЕМ ЖИДКИХ МИНЕРАЛЬНЫХ УДОБРЕНИЙ | 2019 |
|
RU2726542C1 |
УСТРОЙСТВО УПРАВЛЕНИЯ ДОЖДЕВАЛЬНОЙ МАШИНОЙ, ;ёключакицее регулятор скорости дождевальной машины и открытия дождевальных аппаратов, датчики скорости и пол }жения дождеваль-. ной машины на поле и блок задания ;програкю1ы полива, отличающ ее с я тем, что, с целью улучшения качества полива путем повышения точности управления по скорости и устранения неравномерности расходной характеристики машины, устройство снабжено последовательно соединенjHHMH блоком привязки положения машины и блоком совпадения, подключенным к регулятору скорости машины и открытия дождевальных аппаратов, причем датчик скорости вьшолнен в виде датчика количества ходов ксхПеса доясдевальйой машины, датчики скорости и положения лиождевальной машины подключены к входам блока привязки, а Люк задания программы полива вкпю|чает тайАюр и подключен к второму ;входу блока совпадения.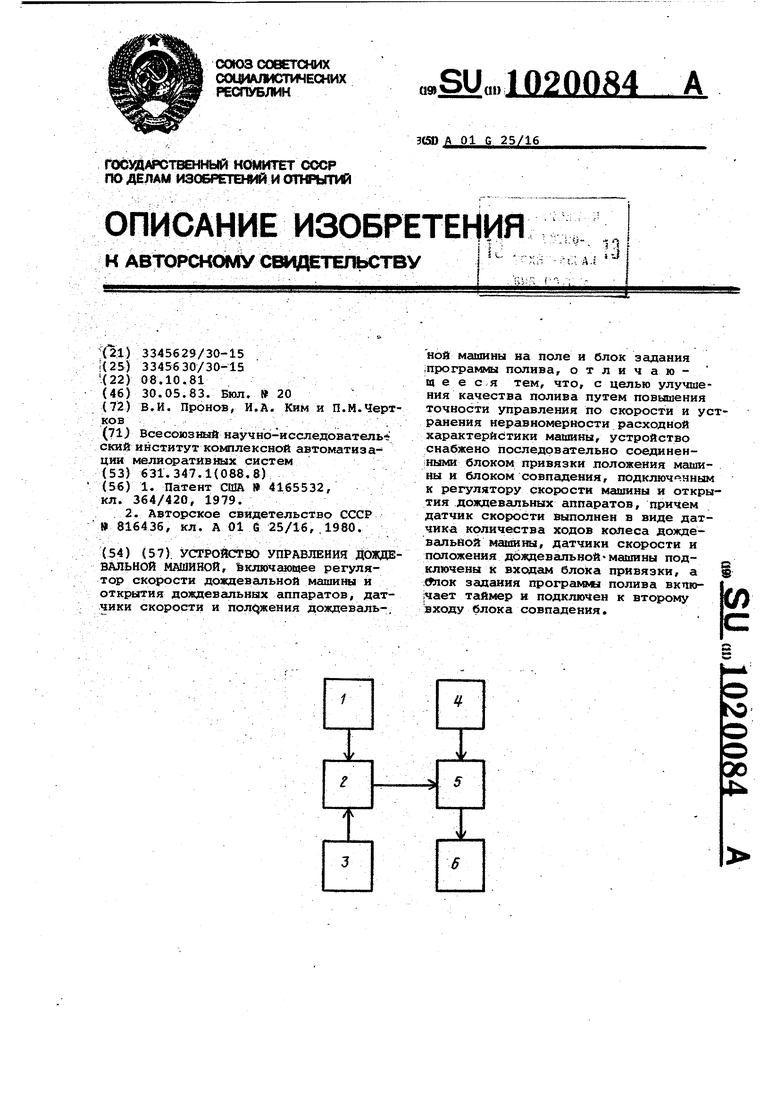
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США 4165532, кл | |||
| Способ получения мыла | 1920 |
|
SU364A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Концевая тележка многоопорной дожде-ВАльНОй МАшиНы | 1979 |
|
SU816436A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
