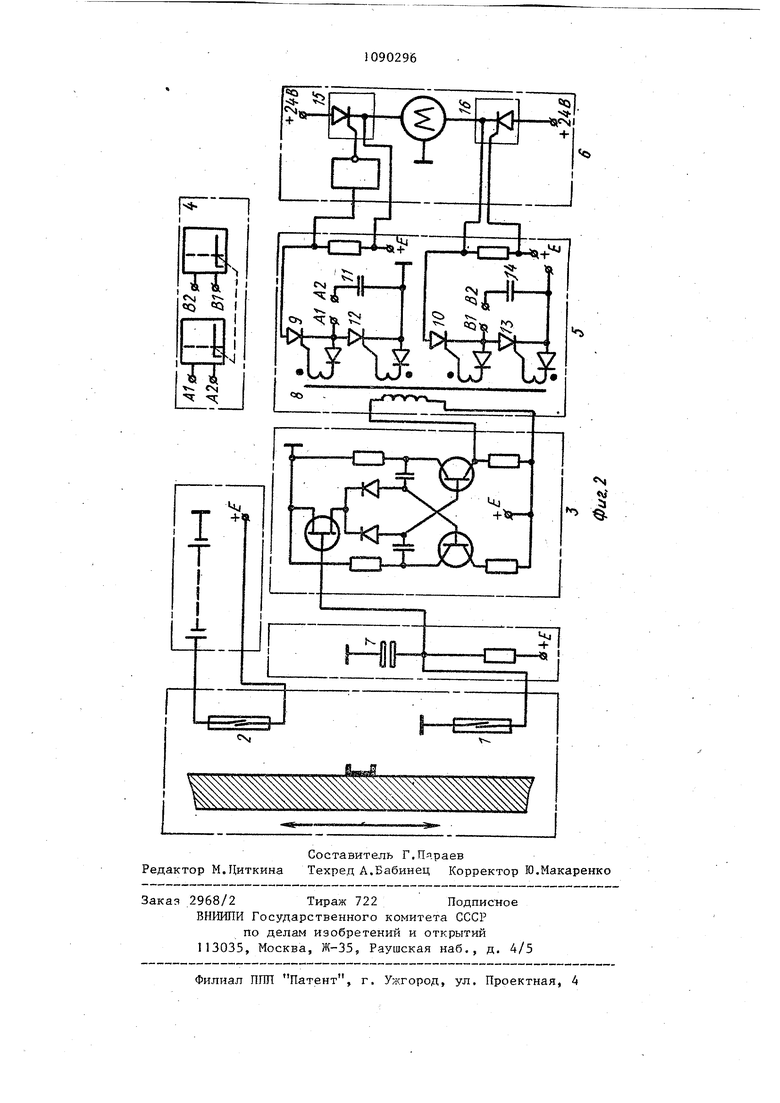
Изобретение относится к сельскому хозяйству и может применяться на дож девальных машинах Фрегат, Кубань и др. с прерьшистым поступательным движением рабочих колес (с гидроприводом или с электроприводом, работающим в стартстопном режиме) для обеспечения равномерности полива на .почвогрунтах с переменным сопротивлением.. Известно устройство регулирования скорости сельскохозяйственных машин, содержащее программный блок-задатчик с генератором импульсов,формирователь, интегрирующий усилитель и датчик скорости, подсоединенный к дополнительному колесу, выход кото рого через электронный блок подключен к исполнительному элементу регулирования скорости машины ij . Недостатками устройства являются его сложность и невозможность регулирования скорости при прерывистости движении дождевальных машин. Известен также регулятор скорост движения дождевальных машин, включшощий программный блок в виде кулачковых дисков, датчик скорости в виде дополнительного колеса с усредняющ11М блоком, кинематически связанного с исполнительным элементомкраном-регулятором 2j . Недостатками этого регулятора являются низкое качество регулирования из-за неточности измерения и задания скорости машины и отсутствие возможности дистанционного управления скоростью дождевальной машины. Цель изобретения - пс)вьш1ение качества полива путем обеспечения равн мерности полива и дистанционного изменения программы полива. Цель достигается тем, что регулятор снабжен преобразователем время частота и пороговым частотным устрой С(увом, а датчик скорости выполнен на герконах с фиксацией начала и окончания хода прерьгоистого движения и подключен через преобразователь время-частота к пороговому устройсттву, выход которого соединен с исполнительным элементом, причем один выход датчика скорости подключен к программному блоку, выход которого соединен с пороговым устройством. На фиг.1 приведена блок-схема регулятора скорости движения дождевальных машин (ДМ); на фиг.2 - при96мер схемного исполнения отдельных блоков регулятора. Регулятор скорости Движения ДМ включает датчик скорости, состоящий из блока 1 для определения начала и блока 2 окончания хода прерьшистого движения, преобразователь 3 и время прерывистого движения частота, программный блок 4 (задатчик скорости на пассивных элементах), пороговое частотное устройство 5 и исполнительный элемент 6. На фиг.2 представлен пример выполнения регулятора на электронных элементах, где обозначено : частотозадающий конденсатор 7, разделительный трансформатор 8 , тиристоры 9 и 10, зарядньй конденсатор П, тиристорные ключи 12 и 13, контакты А1, А2, В и В2 переключателей блока 4, конденсатор 14, ключ 15 и инвертор 16. Блоки I и 2 датчика для определения начала и окончания хода прерывистого движе.пия содержат контактные или бесконтактные элементы, например герконовые переключатели, установленные на приводе колеса ДМ или в схеме управления для электрифицированных приводов колеса ДМ. Назначение этих блоков датчика - сигнализация о времени начала или окончания прерывного движения да. Преобразователь 3 содержит устройства преобразования интервала времени между включениями датчиков I и 2,в частоту. Например, интервал времени между включением датчиков 1 и 2 фиксируется по напряжений заряда конденсатора через токоограничительное сопротивление от сухой батареи. Затем, это напряжение подается на затвор полевого транзистора, используемого в качестве переменного сопротивления, в схеме управления частотой мультивибрдтора. Частотный выход мультивибтратора через разделительньй трансфоратор подается на два раздельных пле- . ча частотного порогового устройства 5. Пороговое устройство,5 содержит, например, два раздельных :плеча из последовательно соединенных двух тиристоров, сопротивления задатчика 4 и конденсатора. В цепи управления тиристоров, подключенных последовательно к источнику питания на сухих батареях, подключены частотные выходы преобразователя время прерывистого движения - частота. Положительная полуволна управляющей частоты заряжает конденсатор через первый тиристор и сопротивление задатчика, а отрицательная полуволна разряжает этбт конденсатор через сопротивление задатчика и второй тиристор,. При повьш1ении частоты выше заданного порога конденсатор не успе:вает разря диться, и к источнику питания одновременно подключаются два тиристора. Импульс увеличения потребления энергии от сухих батарей двумя тирис торами используется исполнительным элементом 6 для формирования команды к уменьшр-нию на одну ступень давления подачи воды в гидроцилиндр ДМ Фрегат или сокращению длительной паузы в электрифицированных Щ Кубань и др. Второе плечо порогового устройства содержит те же элементы и отличается от первого плеча настройкой элементов на нижний порог срабатывания частоты и вьодачи команд в исполнительный элемент 6 для увеличения на одну ступень давления в кране-задатчиКе скорости ДМ с гидравлическим приводом или увеличения длительности паузы между передвижениями ДМ с электрифицированным приводом. Программный блок 4 с задатчиком скорости на пассивных элементах сод жит устройства для счета количест ва ходов прерывистого движения,учета времени суток, а также устройств для набора и считывания программы полива с перфокарты по командам телемеханического устройства и при ру ном наборе или переключения на другую программу полива после прохожде ния ДМ заданного участка поля, а та же корректировки по данным датчиков влажности почвы, датчиков испаряемо ти с дождевой струи и датчиков заданного количества ходов. Отличительной особенностью задатчика 4 является его выход - подключение согласно .заданной программе к пороговому устройству 5 пассивных элементов, например сопротивлений. Это позволяет перестра ивать программу работы ДИ и не требует непрерывного энергопотребления для функционирования задатчика, что характерно для прототипа. Исполнительный элемент 6 содержит источник энергоснабжения и устройства для стыковки с пороговым устройством 5, для осуществления переклю- i чения давления воды в кране-задатчике скорости ДМ гидравлического действия или для изменения длительности паузы остановки движения ДМ с электроприводом рабочих колес. Например, на ДМ Фрегат исполнительный элемент 6 содержит источник питания на сухих батареях24 В, электрогидрореле, КЭГ-И, подключенное гидравлическим входом к трубопроводу ДМ, а выходом к мембранному исполнительному органу для пошаговогореверсивного изменения положения крана-задатчика скорости ДМ. Регулятор скорости движения ДМ устанавливается на дождевальных машинах с пневматическими шинами около привода тележки ведущего колеса ДМ, Для дистанцио1нюго изменения программы работы ДМ задатчик скорости мо- жет соединяться с диспетчерским пунктом проводной линией или импульсным радиоканалом связи. Регулятор скорости движения дождевальной машины работает следующим образом, При необходимости осуществить чередующийся дневной освежительный и ночной увлажнительный полив на Щ. фрегат с пневматическими гминами нахолмистой местности и с разнородным грунтом, где полный оборот ДМ соответствует 18330 ходам гидроцилиндра, а неравномерность проскальзывания рабочего колеса на поле отсутствует, несмотря на то, что обшее количество ходов ДМ при прерывистом движении по полю остается неизменным, в связи с переменным сопротивлением почвогрунта, особенно на уклонах,скорость движения гидроцилиндра изменяется на 50% и на участках местности с повьпиенным сопротивлением грун перекатываншо или на подъеме по холмистои местности изменяется время дояодевания. Это обуславливает излишний расход воды, отклонение от заданной нормы полива и для обеспечения заданной влажности почвы на всем поле требует завьшенной нормы, После 1зключения ДМ Фрегат и устройства в работу датчики 1 и 2 начала и окончания хода прерьюистого движення замыкают цепи в преобразЬвателе 3 время прерывистого движения - частота и, в зависимости от интервала времени между замыканием датчиков S1 1 H 2, преобразователь 3 вырабатывае различную частоту. При работе ДМ на подъем время движения гидроцилиндра привода колеса рабочей тележки ДМ увеличивается до 200%, напряжение заряда конденсатора в цепи управления полевого транзистора возрастает, возрастает также бопротивление полев го транзистора, и преобразователь 3 BbipatSaTidBaeT пониженную частоту, при которой срабатывает второе плечо порогового устройства 5, и подает сигнал на исполнительный элемент 6 для пошагового открытия регулирующего крана-задатчика скорости движения ДМ до тех пор, пока заданное программатором 4 время движения гидроцилиндра привода рабочего колеса ДМ не будет обеспечено. Во время работы да программный блок 4 считает количество ходов прерьюистого движения да и после прохождения заданного количества ходов согласно программе изменяет уставку срабатывания порогового устройства 5. При этом срабатывает одно из плеч порогового устройства 5 Для увеличения или уменьшения интервала времени пггрывистого движения да. Устройство потребляет повышенное количество энергии только на время переключения регулирующего крана-задатчика скорос ти ДМ. Такт образом, устройство обеспечивает равномерный полив по любой программе полива при минимальиом энергопотреблении. Работа регулятора по фиг.2 происходит следующим образом. Принцип работы этого регулятора о основан на сравнении заданного программатором времени с временем факти ческого движения гидроцилиндра, которое измеряется путем заряда конден сатора от источника постоянного тока ° При движении гидроцилиндра вверх, контакт нижнего геркона размыкается конденсатор 7 заряжается от источника постоянного тока. Совершив рабочи ход, гидроцилиндр доходит до крайнег верхнего положения, замыкая при этом контакт А2. Кратковременно подается напряжение на преобразователь 3 и пороговое устройствр 5. Частота, вырабатываемая мультивиб ратором преобразователя 3, зависит от напряжения, снимаемого с конденсатора 7, которое, в свою очередь, 6 пропорционально времени рабочего хода гидроцилиндра. Через разделительный трансформатор 8 управляющая частота подется на тнристоры порогового устройства 5. При прохождении положительной полуволны управляющей частоты отпираются тиристоры 9 и 10 и через сопротивления задатчика скорости 4, подключенные к клеммам А н А , происходит заряд конденсаторов 11 и 14 от н-сточннка питания +Е. При прохождении отрицательной полуволны управляющей частоты происходит отпирание тиристорных ключей 12 н 13, через которые конденсаторы 11 и 14 разряжаются. Время заряда и разряда конденсатора определяется сопротивлением задатчика скорости, временем между отпиранием тиристоров и зависит от управляющей частоты, а следовательно, от фактической скорости движения.Если время заряда конденсатора окажется больше времени между отпираниями тиристоров, произойдет замыкание источников питания через последовательно соединенные тиристоры и токоограничивающие сопротивления, т.е. произойдет срабатывание порогового элемента. Регулирующие сопротивления задатчика скорости 4 подобраны таким образом, что при равенстве фактичес-. кой скорости заданный первый пороговьй элемент срабатывает, а второй не срабатьшает, поэтому на исполнительное устройство никакие команд|)1. не подаются. Если скорость больше заданной, то не срабатьшагот оба пороговых элемента, и через инвертор 16 наопределенное время открыт тириг сторнь1й ключ 15, в результате чего двигатель исполнительного механизма приоткрывает кран-задатчик скорости и увеличивает скорость движения гидроцилиндра. Если скорость меньше заданной, срабатывают оба пороговых элемента открывается Тиристорный ключ 15, то в конечном итоге приведет к меньшению скорости. Эффективность работы регулятора скорости да заключается в обеспечеции равномерности полива да на поле по любой программе полива и обеспечении реализации устройства на энергонеобеспеченньЬс да. Это дает
710902968
возможность улучшить качество, полива,это позволяет увеличить урожайность
устранить необходимость постоянногона орошаемом поле до 25%, что соотприсутствия оператора на ДМ и со-ветствует среднему экономическому эфвершенствовать технику полива. Все .фекту в, 34,4 руб/га.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования влажности почвы | 1981 |
|
SU1021434A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ АВТОМАТИЗИРОВАННАЯ ОРОСИТЕЛЬНАЯ СИСТЕМА С НИЗКОНАПОРНЫМИ ДОЖДЕВАЛЬНЫМИ МАШИНАМИ КРУГОВОГО ДЕЙСТВИЯ | 2009 |
|
RU2402199C1 |
| Система управления и защиты многоопорной дождевальной машины | 1980 |
|
SU1028287A1 |
| Устройство программного управления дождевальной машиной кругового действия | 1982 |
|
SU1130277A1 |
| Регулятор скорости дождевальной машины | 1981 |
|
SU973079A1 |
| Устройство управления дождевальной машиной | 1981 |
|
SU1020084A1 |
| ДОЖДЕВАЛЬНАЯ МАШИНА | 2010 |
|
RU2467562C2 |
| Устройство для внесения удобрений к дождевальной машине | 1988 |
|
SU1544289A1 |
| ДОЖДЕВАЛЬНАЯ МАШИНА | 2002 |
|
RU2222939C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДОЖДЕВАЛЬНОЙ МАШИНЫ КРУГОВОГО ДЕЙСТВИЯ | 1990 |
|
RU1778920C |
РЕГУЛЯТОР СКОРОСТИ ДВИЖЕНИЯ .ДОЖДЕВАЛЬНОЙ , содержащий программньй блок, датчик скорости движения и исполнительный элемент, отличающийся тем, что, с целью повышения качества полива путем обеспечения равномерности полива и дистанционного изменения программы полива, регулятор снабжен преобразователем время-частота и пороговым частотным устройством, а датчик скорости выполнен на герконах с фиксацией начала и окончания хода прерывистого движения и подключен через преобрааователь время-частота к пороговому устройству, выход которого соединен с исполнительным элементом, причем один выход датчика скорости подключен к програьмному блоку, выход которого соединен с пороговым устройством.. 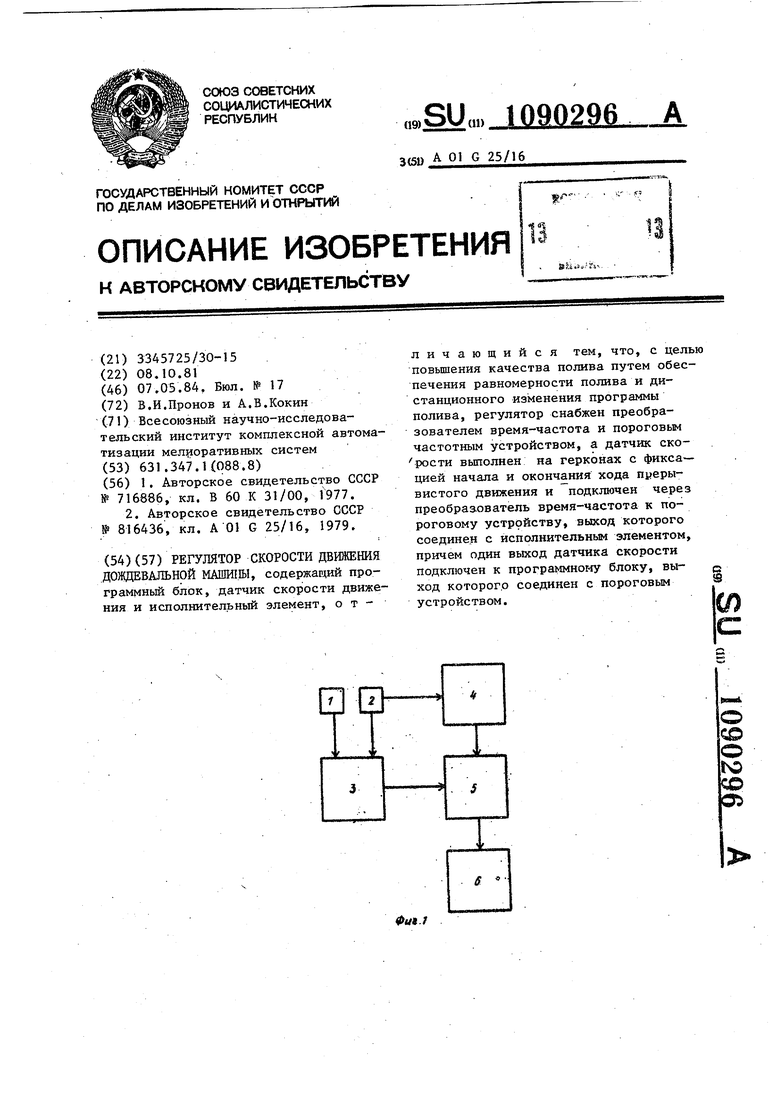
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Стабилизатор скорости движения транспортного средства | 1977 |
|
SU716886A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Концевая тележка многоопорной дожде-ВАльНОй МАшиНы | 1979 |
|
SU816436A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
