2. Датчик по п. 1, о т л и ч.а ю щ и и с я тем, что конденсатор переменной емкости снабжен второй группой дополнительных m секций неподвижных обкладок, аналогичных основным и расположенных со сдвигом
относительно первой группы на угол
/Р .
3. Датчик по п. 2, отличающийся тем,- что секции второй группы электрически соединены между собой.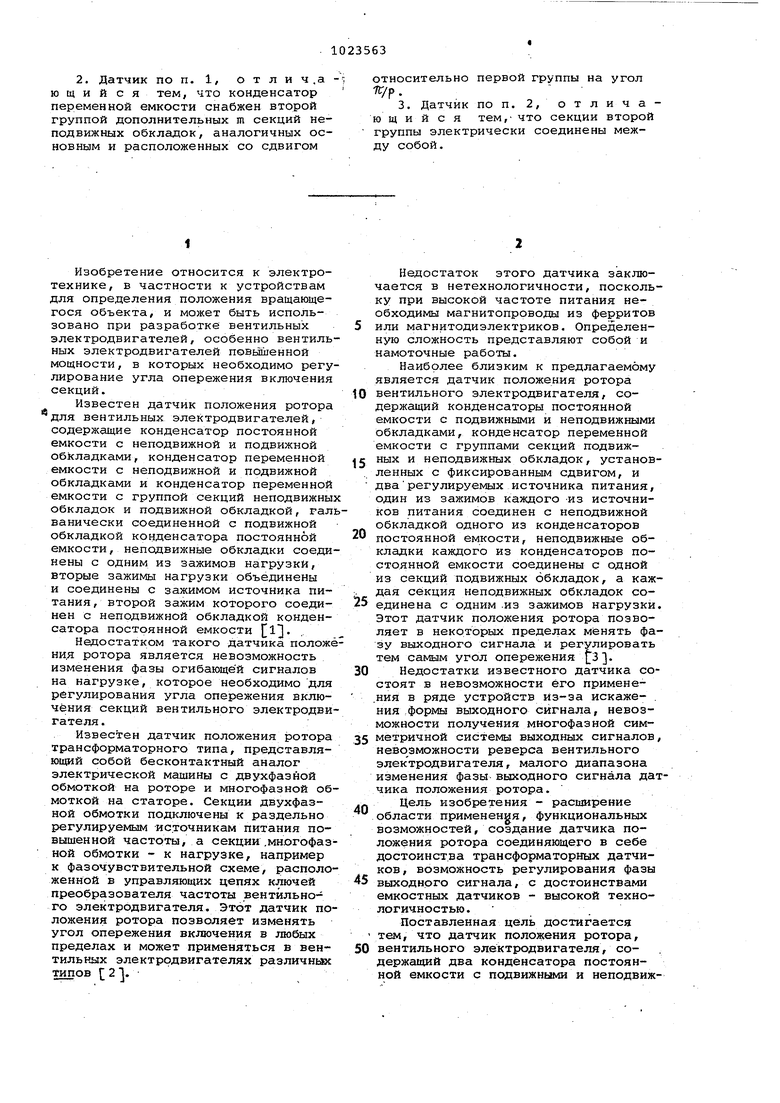
| название | год | авторы | номер документа |
|---|---|---|---|
| Емкостной датчик положения ротора вентильного электродвигателя | 1976 |
|
SU605291A1 |
| Вентильный электродвигатель | 1983 |
|
SU1095323A1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1985 |
|
SU1356134A1 |
| Вентильный электродвигатель и способ его настройки | 1984 |
|
SU1272414A1 |
| Датчик положения для управления вентильным электродвигателем | 1974 |
|
SU663035A1 |
| Вентильный электродвигатель | 1986 |
|
SU1372575A2 |
| Реверсивный вентильный электродвигатель | 1985 |
|
SU1264269A1 |
| Вентильный электродвигатель | 1981 |
|
SU970578A1 |
| Способ реверсирования частоты вращения многодвигательного электропривода | 1978 |
|
SU792522A1 |
| Вентильный электродвигатель | 1984 |
|
SU1241364A1 |

Изобретение относится к электротехнике, в частности к устройствам для определения положения вращанвдегося объекта, и может быть использовано при разработке вентильных электродвигателей, особенно вентильных электродвигателей повЕлшенной мощности, в которых необходимо регулирование угла опережения включения секций.
Известен датчик положения ротора для вентильных электродвигателей, содержащие конденсатор постоянной емкости с неподвижной и подвижной обкладками, конденсатор переменной емкости с неподвижной и подвижной обкладками и конденсатор переменной емкости с группой секций неподвижных обкладок и подвижной обкладкой, гальванически соединенной с подвижной Обкладкой конденсатора постоянной емкости, неподвижные обкладки соединены с одним из зажимов нагрузки, вторые зажимы нагрузки объединены и соединены с зажимом источника питания, второй зажим которого соединен с неподвижной обкладкой конденсатора постоянной емкости l Недостатком такого датчика положения ротора является невозможность изменения фазы огибающей сигналов на нагрузке, которое необходимо для регулирования угла опережения включения секций вентильного электродвигателя .
Известен датчик положения ротора трансформаторного типа, представляющий собой бесконтактный аналог электрической машины с двухфазной обмоткой на роторе и многофазной обмоткой на статоре. Секции двухфазной обмотки подключены к раздельно регулируемым источникам питания повышенной частоты, а секции.многофазной обмотки - к нагрузке, например к фазочувствительной схеме, расположенной в управляющих цепях ключей преобразователя частоты вентильного электродвигателя. Этот датчик положения ротора позволяет изменять угол опережения включения в любых пределах и может применяться в вентильных электродвигателях различньвг типов 2 1.
Недостаток этого датчика заключается в нетехнологичности, поскольку при высокой частоте питания необходимы магнитопроводы из ферритов
или магнитодиэлектриков. Определенную сложность представляют собой и намоточные работы.
Наиболее близким к предлагаемому является датчик положения ротора
0 вентильного электродвигателя, содержащий конденсаторы постоянной емкости с подвижными и неподвижными обкладками, конденсатор переменной емкости с группами секций подвижe ных И неподвижных обкладок, установленных с фиксированным сдвигом, и дварегулируемых источника питания, один из зажимов каждого -из источников питания соединен с неподвижной обкладкой одного из конденсаторов
постоянной емкости, неподвижные обкладки каждого из конденсаторов постоянной емкости соединены с одной из секций подвижных обкладок, а каждая секция неподвижных обкладок соединена с одним .из зажимов нагрузки. Этот датчик положения ротора позволяет в некоторых пределах менять фазу выходного сигнала и регулировать тем самым угол опережения fS.
0 Недостатки известного датчика состоят в невозможности его примене,ния в ряде устройств из-за искаже- . ния формы выходного сигнала, невозможности получения многофазной сим5 матричной системы выходных сигналов, невозможности реверса вентильного электродвигателя, малого диапазона изменения фазы выходного сигнала датчика положения ротора.
Цель изобретения - расширение области применения, функциональных возможностей, создание датчика положения ротора соединяющего в себе достоинства трансформаторных датчиков, возможность регулирования фазы
5 выходного сигнала, с достоинствами емкостных датчиков - высокой технологичностью.
Поставленная цель достигается тем, что датчик положения ротора,
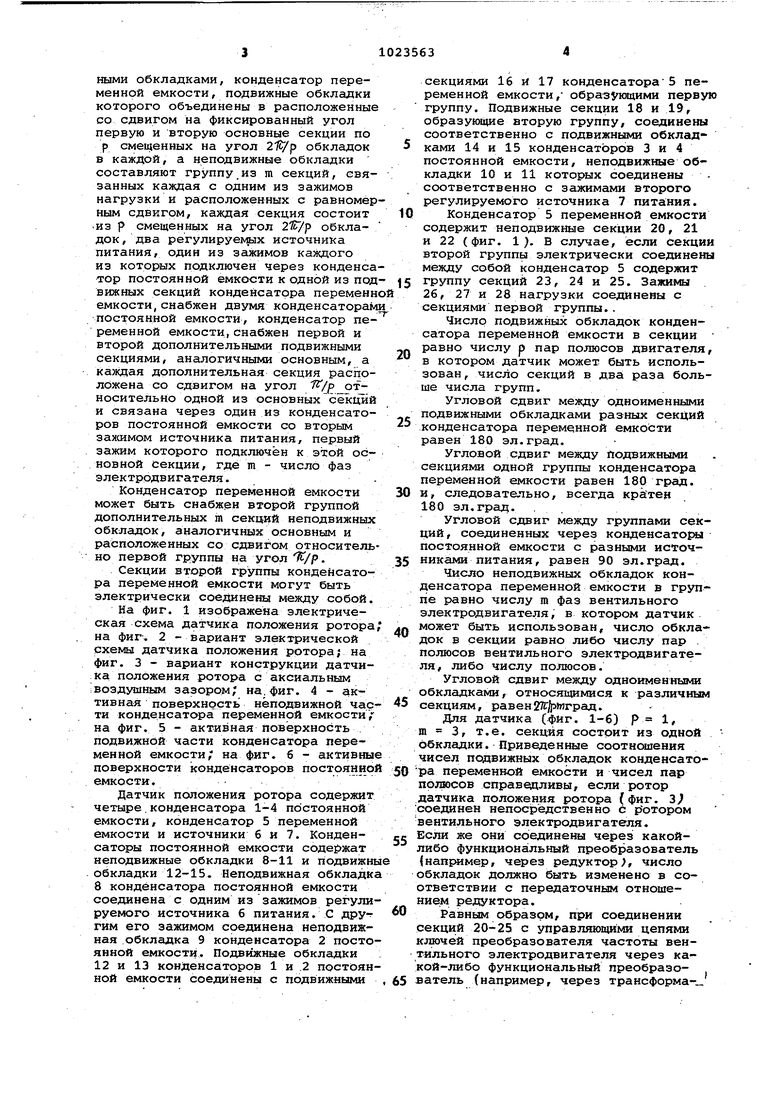
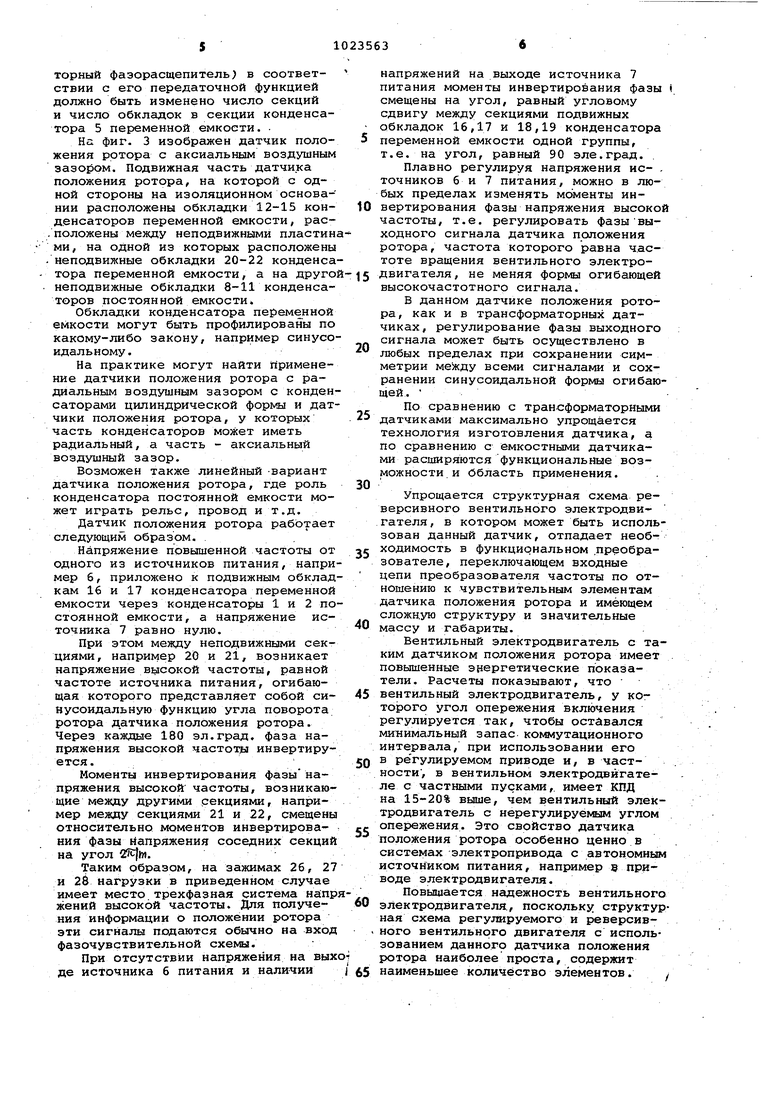
0 вентильного электродвигателя, содержащий два конденсатора постоянной емкости с подвижными и неподвижными обкладками, конденсатор переменной емкости, подвижные обкладки которого объединены в расположенные со сдвигом на фиксированный угол первую и вторую основные секции по р смещенных на угол обкладок в каждой, а неподвижные обкладки составляют группу,из m секций, связанных каждая с одним из зажимов нагрузки и расположенных с равномер ным сдвигом, каждая секция состоит из р смещенных на угол 2К7р обкладок, два регулируе1 их источника питания, один из зажимов каждого из которых подключен через конденса тор постоянной емкости к одной из под вижных секций конденсатора переменн емкости,снабжен двумя конденсаторам постоянной емкости, конденсатор переменной емкости,снабжен первой и второй дополнительными подвижными секциями, аналогичными основным, а кавдая дополнительная секция расцоложена со сдвигом на угол /f ртносительно одной из основных секций и связана через один из конденсаторов постоянной емкости со вторым зажимом источника питания, первый зажим которого подключён к этой основной секции, где m - число фаз электродвигателя. Конденсатор переменной емкости может быть снабжен второй группой дополнительных m секций неподвижных обкладок, аналогичных основным и расположенных со сдвигом отвоситель но первой группа на угол . Секции второй группы конденсатора переменной емкости могут быть электрически соединены между собой. На фиг. 1 изображена электрическая схема датчика положения ротора на фиг, 2 - вариант электрической схемы датчика положения ротора; на фиг. 3 - вариант конструкции датчика положения ротора с аксиальным iвоздушным зазором; на.фиг. 4 - активная поверхность неподвижной час ти конденсатс а переменной емкости, на фиг. 5 - активная поверхность . ПОДВИЖНОЙ части конденсатора переменной емкости; на фиг. б - активны поверхности конденсаторов постоянно емкостя. Датчик положения ротора содержит четыре.конденсатора 1-4 постоянной емкости, конденсатор 5 переменной емкости и источники б и 7. Конденсаторы постоянной емкости содержат неподвижные обкладки 8-11 и подвижн обкладки 12-15. Неподвижная обкладк 8 конденсатора постоянной емкости соединена с одним из зажимов регули руемого источника 6 питания. С другим его зажимом соединена неподвижная .обкладка 9 конденсатора 2 посто янной емкости. Подвиж1ше обкладки 12 и 13 конденсаторов 1 и 2 постоян ной емкости соединены с подвижными секциями 16 и 17 конденсатора5 переменной емкости, образующими первую группу. Подвижные секции 18 и 19, образующие вторую группу, соединены соответственно с подвижными обкладками 14 и 15 конденсаторов 3 и 4 постоянной емкости, неподвижные обкладки 10 и 11 которых соединены соответственно с зажимами второго регулируемого источника 7 питания. Конденсатор 5 переменкой емкости содержит неподвижные секции 20, 21 и 22 (фиг. 1 ). В случае, если секции второй группы электрически соединены между собой конденсатор 5 содержит группу секций 23, 24 и 25. Зажимы 26, 27 и 28 нагрузки соединены с секциями первой группы.. Число подвижных обкладок конденсатора переменной емкости в секции равно числу р пар полюсов двигателя, в котором датчик может быть использован, число секций в два1 раза больше числа групп. Угловой сдвиг между одноименными подвижными обкладками разных секций конденсатора переменной емкости равен 180 эл.град. Угловой сдвиг между подвижными секциями одной группы конденсатора переменной емкости равен 180 град. и, следовательно/ всегда крйтен 180 эл.град. . . Угловой сдвиг между группами секций, соединенных через конденсато нл постоянной емкости с разными источниками питания, равен 90 эл.град. Число неподвижных обкладок конденсатора переменной емкости в группе равно числу m фаз вентильного электродвигателя, в котором датчик . может быть использован, число обкладок в секции равно либо числу пар . полюсов вентильного электродвигателя, либо числу полюсов. Угловой сдвиг между одноименными обкладками, относяпшмися к различным секциям, равен27фиград. Для датчика (фиг. 1-6) р 1, m 3, т.е. секция состоит из одной обкладки. Приведенные соотнсяиения чисел подвижных обкладок конденсатора переменной емкости и чисел пар протесов справедхливы/ если ротор датчика положения ротора (фиг. 3 сое;шнен непосредственно С ркэтором вентильного электродвигателя. Если же они соединены через какойлибо функциональный преобразователь {например через редуктор;, число обкладок должно быть изменено в соответствии с передаточным отношение:м редуктора. Равным образом/ при соединении секций 20-25 с управляющими цепями клпочей преобразователя частоты вентильного электродвигателя через какой-либо функциональный преобразователь {например, через трансформа-
торный фазорасщепитель) в соответствии с его передаточной функцией должно быть изменено число секций и число обкладок в секции конденсатора 5 переменной емкости.
На фиг. 3 изображен датчик положения ротора с аксиальным воздушным зазором. Подвижная часть датчика положения ротора, на которой с одной стороны на изоляционном основаНИИ расположены обкладки 12-15 конд.енсаторов переменной емкости, рас.положены между неподвижными пластинами, на одной из которых расположены неподвижные обкладки 20-22 конденсатора переменной емкости, а на другойнеподвижные обкладки 8-11 конденсаторов постоянной емкости.
Обкладки конденсатора переменной емкости могут быть профилированы по какому-либо закону, например синусоидальному.
На практике могут найти применение датчики положения ротора с радиальным воздушным зазором с конденсаторами цилиндрической формы и датчики положения ротора, у которых часть конденсаторов может иметь радиальный, а часть - аксиальный воздушный зазор.
Возможен также линейный -вариант датчика положения ротора, где роль конденсатора постоянной емкости может играть рельс, провод и т.д.
Датчик положения ротора работает следующим образом.
Напряжение повышенной частоты от одного из источников питания, например 6, приложено к подвижным обкладкам 16 и 17 конденсатора переменной емкости через конденсаторы 1 и 2 постоянной емкости, а напряжение источника 7 равно нулю.
При этом между неподвижными секциями, например 20 и 21, возникает напряжение высокой частоты, равной частоте источника питания, огибающая которого представляет собой синусоидальную функцию угла поворота ротора датчика положения ротора. Через каждые 180 эл.град. фаза напряжения высокой частоты инвертируется.
Моменты инвертирования фазы напряжения высокой частоты, возникающие между другими секциями, например между секциями 21 к 22, смещены относительно моментов инвертирования фазы напряжения соседних секций на угол 2гс|т.
Таким образом, на зажимах 26, 27 и 2& нагрузки в приведенном случае имеет место трехфазная система напржений высокой частоты. Для получения информации о положении ротора эти сигналы подаются обычно на вход фазочувствительной схемы.
При отсутствии напряжения на вых де источника 6 питания и наличии
напряжений на выходе источника 7 питания моменты инвертирования фазы смещены на угол, равный угловому сдвигу между секциями подвижных обкладок 16,17 и 18,19 конденсатора переменной емкости одной группы, т.е. на угол, равный 90 эле.град. .
Плавно регулируя напряжения источников 6 и 7 питания, можно в любых пределах изменять моменты инвертирования фазы напряжения высоко частоты, т.е. регулировать фазывыходного сигнала датчика положения ротора, частота которого равна частоте вращения вентильного электродвигателя , не меняя формы огибающей высокочастотного сигнала.
В данном датчике положения ротора, как и в трансформаторных датчиках, регулирование фазы выходного сигнала может быть осуществлено в любых пределах при сохранении симметрии между всеми сигналами и сохранении синусоидальной формы огибающей.
По сравнению с трансформаторными датчиками максимально упрощается технология изготовления датчика, а по сравнению с емкостными датчиками расширяются функциональные возможности, и Область применения.
Упрощается структурная схема реверсивного вентильного электродвигателя, в котором может быть использован данный датчик, отпадает необходимость в функциональном .преобразователе, переключающем входные цепи преобразователя частоты по отношению к чувствительным элементам датчика положения ротора и имеющем сложную структуру и значительные массу и габариты.
Вентильный электродвигатель с таким датчиком положения ротора имеет повышенные энергетические показатели. Расчеты показывают, что вентильный электродвигатель, у которого угол опережений включения регулируется так, чтобы оставался минимальный запас- коквйутационного интервала, при использовании его в регулируемом приводе и, в частности, в вентильном электродвигателе с частными пусками,, имеет КПД на 15-20% выше, чем вентильный электродвигатель с нерегулируемым углом опережения. Это свойство датчика положения ротора особенно ценно в системах электропривода с автономны источником питания, например 9 приводе электродвигателя.
Повышается надежность вентильног электродвигателя, поскольку структуная схема peryjHipyeMoro и реверсивного вентильного двигателя с использованием данногр датчика положения ротора наиболее проста, содержит наименьшее количество элементов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент Великобритании i 1115523, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
