1
Изобретение относится к электро- : технике и может найти применение лля управления многодвигательных электроприводов с синхронным вращением механически несвязанных валов несколь-5 них электродвигателей.
Известен способ реверсирования частоты вращения многодвигательного электропривода с бесконтактными злек- Ю тродвигателями постоянного тока, содержащими каждый синхронную машину с датчиком положения ротора и вентильный коммутатор, датчик положения ротора каждого электродвигателя подк- 15 лючен своим выходом к управляющим цепям коммутатора следующего электродвигателя по кольцевой схеме 1. ;реверс такого электропривода может Ъыть осуществлен изменением полярное- 20 ти напряжения- питания, изменением протекания тока в обмотке возбужде- ния синхронной машины.
Этот способ является Наиболее:близким по технической сущности и дости- 25 гаемому результату к изобретению. Однако при реализации этого способа электропривод должен быть снабжен реверсором. Это усложняет реализацию перечисленных способов. 30
Целью изобретения является yi:poщение способа.
Цель достигается тем, что в 13вестном способе реверсирования частоты вращения 5когодвигательного электропривода-с бесконтактными электродвигателями постоянного тока, изменяют моменты нагрузок, по крайней мере, двух электродвигателей так, что разность моментов нагрузок t Beличивалась.
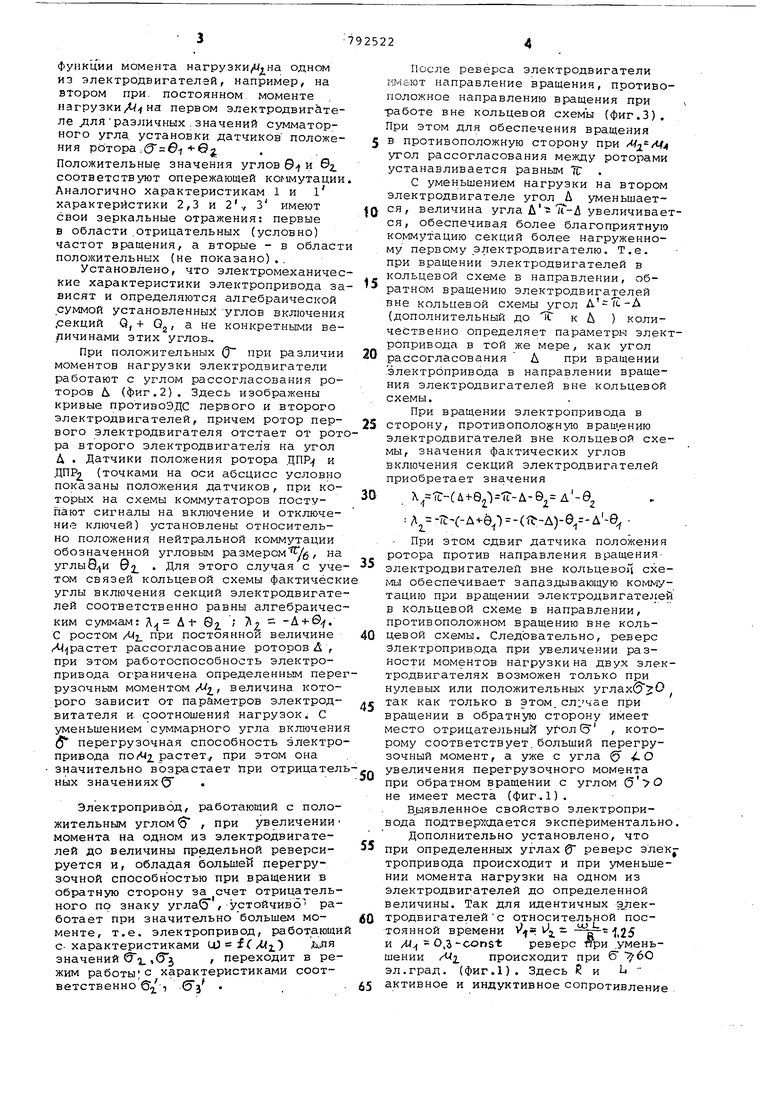
На фиг.1 изображены электромеханические характеристики двухдвигательного электропривода; на фиг.2 кривые противоЭДС и от,носительное расположение датчиков положения ротора в двухдвигательном электроприводе при вращении электродвигателей в кольцевой схеме в ту же ьсторону , что и при работе вне кольцевой схемы на фиг.З - то же, что и на фиг.1, только для случая, когда электродвигатели в кольцевой схеме вращаются в направлении, обратном вращению электродвигателей вне кольцевой схемы.
Электромеханические характеристики двухдвигательного электропривода прототипа представлены на фиг.1. Кривглли , 2,2, 3,3.. изображены зависимости частоты вращения OL) в функции момента нагрузки/У| на одном из электродвигателей, например, на втором при. постоянном моменте нагрузки/У на первом электродвигате ле дляразличных , значений сумматорного угла, установки датчиков положения ротора ;,(0 -t-Gj Положительные значения углов Э и ©2. соответствуют опережающей коммутации Аналогично характеристикам 1 и l характеристики 2,3 и 2,, 3 имеют свои зеркальные отражения: первые в области .отрицательных (условно) частот вращения, а вторые - в област положительных {не показано).. Установлено, что электромеханиче кие характеристики электропривода за висят и определяются алгебраической суммой установленных -углов включения .секций Q, + Qg, а не конкретными ве/тичинами этих углов-. При положительных О при различии моментов нагрузки электродвигатели работают с углом рассогласования роторов Д (фиг.2). Здесь изображены кривые противоЭДС первого и второго электродвигателей, причем ротор первого электродвигателя отстает от рот ра второго электродвигателя на угол Д . Датчики положения ротора .ЦПР и ДПР2 (точками на оси абсцисс условно показаны положения датчиков, при которых на схемы коммутаторов поступают сигналы на включение и отключение ключей) установлены относительно положения нейтральной коммутации обозначенной угловым размером 6, на углыЭ и 02. Я этого случая с уче том связей кольцевой схемы фактическ углы включения секций электродвигате лей соответственно равны алгебраичес ким суммам: Д Д 1- 02 - ./. С ростом /ML при постоянной величине Л растет рассогласование роторов Д , при этом работоспособность электропривода ограничена определенным пере рузочным моментом Л2, величина которого зависит от параметров электродвитателя и. соотношений нагрузок. С уменьшением суммарного угла включени ( перегрузочная способность электро привода по . растет,, при этом она значительно возрастает при отрицател ных значениях 0 . Электропривод, работающий с положительным углом6 , при увеличении момента на одном из электродвигателей до величины предельной реверсируется и, обладая большей перегрузочной способностью при вращении в обратную сторону за счет отрицатель ного по знаку углаб , устойчиво ра ботает при значительно большем моменте, т.е. электропривод, работающ с- характеристиками tUefC/tf ) ДхЯЯ значений i переходит в ре жим работы;с характеристиками соответственно 6,, .(5з . После реверса электродвигатели Ичьют направление вращения, противоположное направлению вращения при работе вне кольцевой схемы (фиг.З). При этом для обеспечения вращения в противоположную сторону при угол рассогласования между роторами устанавливается равным 7Г . С уменьшением нагрузки на втором электродвигателе угол А уменьшается, величина угла As увеличивается, обеспечивая более благоприятную коммутацию секций более нагруженному первому электродвигателю. Т.е. при вращении электродвигателей в кольцевой схеме в направлении, обратном вращению электродвигателей вне кольцевой схемы угол A-ic-A (дополнительный до itT к Д ) количественно определяет параметры электропривода в той же мере, как угол рассогласования Л при вращении .электропривода в направлении вращения электродвигателей вне кольцевой схемы. При вращении электропривода в сторону, противополодсную вращению электродвигателей вне кольцевой схемы, значения фактических углов включения секций электродвигателей приобретает значения и:-(:д-ь8 (Г-д-е. д-в д,-;( -(Яг-Д)-0,-д-в При этом сдвиг датчика полои ения ротора против направления вращенияэлектродвигателей вне кольцевоД схемы обеспечивает запаздывающую KOMNryтацию при вращении электродвигате;1еи в кольцевой схеме в направлении, противоположном вращению вне кольцевой схемы. Следовательно, реверс электроприв.ода при увеличении разности моментов нагрузки на двух электродвигателях возможен только при нулевых или положительных углах(3 2- , так как только в этом.случае при вращении в обратную сторону имеет место отрицательный угол(о , которому соответствует.больший перегрузочный момент, а уже с угла о 4.О увеличения перегрузочного момента при обратном вращении с углом ( не имеет места (фиг.1). Выявленное свойство электропривода подтвер :одается экспериментально. Дополнительно установлено, что при определенных углах 0 реверс электропривода происходит и при уменьшении момента нагрузки на одном из электродвигателей до определенной величины. Так для идентичных электродвигателей с относительной постоянной времени V v w- {,25 и /ы О,5-const реверс при .уменьшении . происходит при б бО эл.град. (фиг.1). Здесь 5 и Ь активное и индуктивное сопротивление
секции электродвигателя. При меньших значениях (о реверс происходит только при увеличении . яо предельной величины (фиг,1).
формула изобретения
Способ реверсирования частоты вра,цения многодвигательного электропривода с бесконтактными электродвигателями постоянного тока, в котором датчик положения ротора каждого электродвигателя подключен своим выходом к управляющим цепям вентильного коммутатора следующего электродвигателя по кольиевой схаме, согласно которому в каждом электродвигателе устанавливают датчик положения ротора так, чтобы алгебраическая сумма ус тановленных углов включения секций всех электродвигателей была равна нулю или положительна (опережающая коммутация), отличают и йс я тем, что, с целью упрощения изменяют моменты нагрузок, по крайней мере, двух электродвигателей так, чтобы разность моментов нагрузок уве0личивалась.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 15 340052, кл. Н 02 Р 7/68, 1970.

| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1981 |
|
SU1023613A2 |
| Многодвигательный электропривод | 1978 |
|
SU785938A2 |
| Многодвигательный электропривод | 1978 |
|
SU942232A1 |
| Многодвигательный электропривод с бесконтактными электродвигателями постоянного тока | 1973 |
|
SU520684A2 |
| Многодвигательный электропривод | 1981 |
|
SU1001420A1 |
| Способ управления многодвигательным электроприводом | 1978 |
|
SU769696A1 |
| Многодвигательный электропривод | 1978 |
|
SU974541A2 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Многодвигательный электропривод с бесконтактными электродвигателями постоянного тока | 1970 |
|
SU340052A1 |
| Многодвигательный электропривод | 1986 |
|
SU1410211A1 |

, fl,J; Гг(г
f- б, f
2 - (Г с за
З-б,
Риг. 1
