Изобретение относится к автоматическому регулированию возбуждения синхронных машин с автоматическим регулятором возбуждения сильного действия.
Известен автоматический регулятор возбуждения сильного действия (АРВ), в котором для Обеспечения динамической устойчивости осуществлена форсировка возбуждения, до момента достижения максимума угла вылета ротора генератора в первом цикле качаний .
Недостатком известного способа является то, что он не обеспечивает возможаости ирпользования всей обЛасти настроечных параметров АРВ, которые по условиям статической устойчивости могут использоваться..
Наиболее близким по технической сущности к изобретению является способ автоматического регулирования возбуждения синхронного генератора в зависимости от отклонения и производных напряжения и путем изменения диапазона насгроеч-, ных параметров в результате измерения производной частоты на шинах электростанций, сравнения измеренного значения с уставкой зоны нечувствительности и увеличения коэффициента по производной частоты при превышении границы зоны нечувствительности 2 .
Недостатком способа является то, что он также не обеспечивает полного совпадения областей статической и динамической устойчивости, так как увеличение воздействия по производной частоты J ограничивается . условиями устойчивости вблизи правой высокочастотной границы области статической устойчивости.
Цель изобретения - повышение динамическрй устойчивости.
Цель достигается тем,что согласно способу .автоматического регулирования возбуждения с1инхронного генератора , осуществляемому путем изменения диапавона настроечных параметров в результате измерения гфоизводной частоты на вганах электростанции сравнения измеренного значения с уставкой зоны нечувствительности и увеличения коэффициента по производной частоты, измеряют дополнительно производную тока ротора генератора, сравнивают величину прозводной тока ротора с уставкой зоы нечувствительности и в случае превышения.ее воздействуют по канау производной тока-ротора с постоянным коэффициентом, одновременно сравнивают отклонение частоты на инах электростанции с уставкой зо- ы нечувствительности и если отклоение частоты не превышает уставки оны нечувствительности, то воздействуют по каналу отклонения частоты с постоянным коэффициентом, а в случае превышения отклонения частоты уставки зоны нечувствительности воздействуют дополнительно по каналу 5 отклонения частоты с переменным коэффициентом в соответствии с выражением: Kojj.b5. - ,„(й-$-С), где l oSerr постоянный статический коэф({яциент; отклонение частоты,.
10 KQ.J постоянный динамический коэффициент, С - величина зоны нечувствительности,
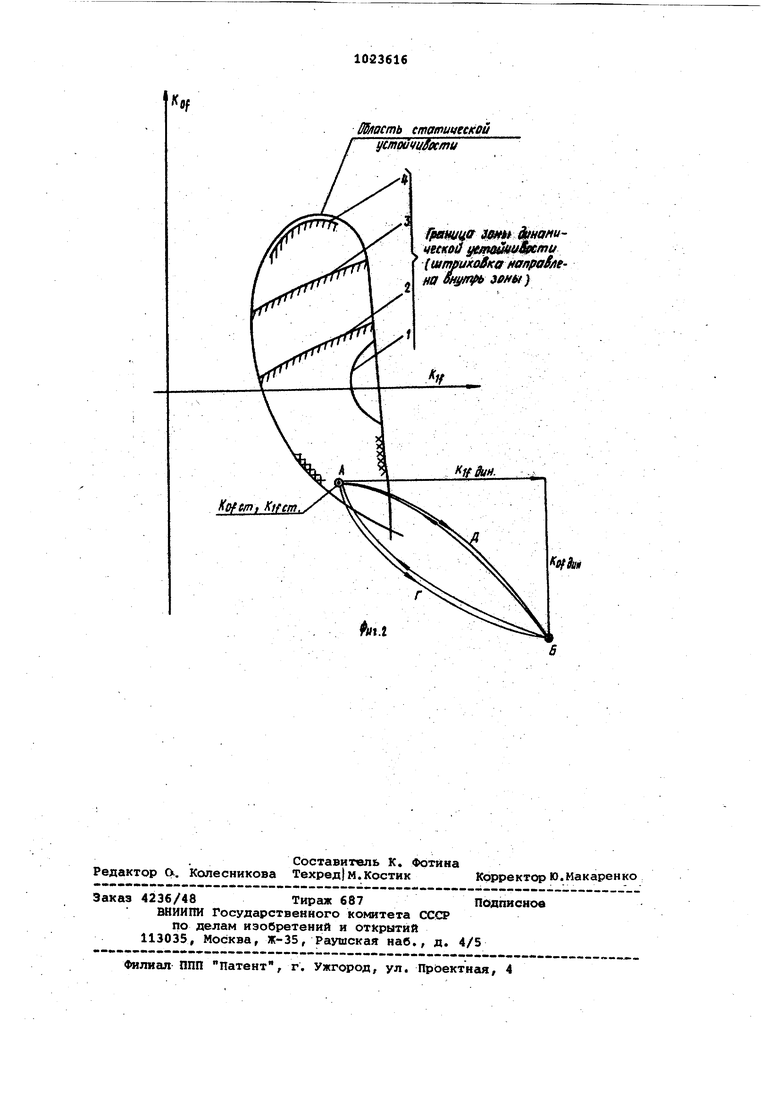
йа фиг 1 привейегна блок-схема, ре алиэующая спб сбб автстлатич ее кого
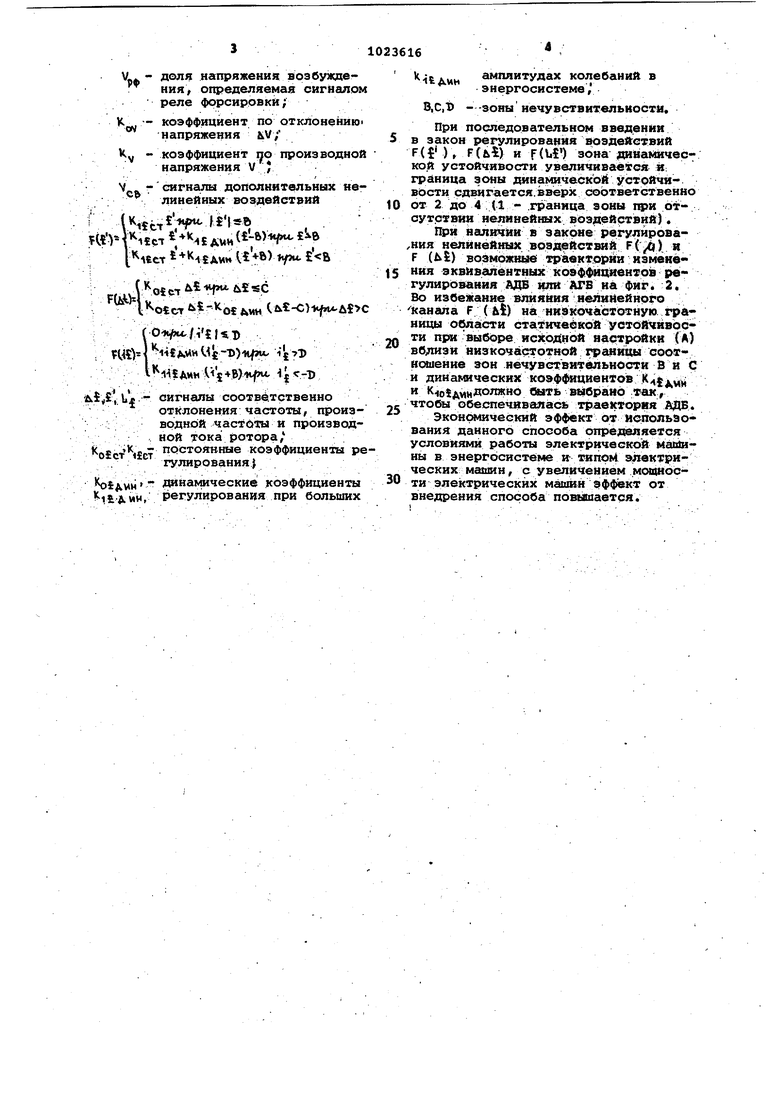
15 регулирования возбуждения синхронного генератора) на фиг. 2 - изменеJ ия гранидаа зоны динамической устойчивости внутри области статической устойчивости.
Q Схема содержит блок 1 измерения напряжения статора электрической машины, соединенный с сумматором 2, блок 3 измерения отклонения частоты/ соединенный с сумматором 2 через блок 4 формирования сигнала стабилизации по отклонению частоты и через блок 5 форладрования производной частоты, соединенный с блоком 6 формирования сигнала стабилизации по производной частоты, а
также содержит блок 7 измерения - йрСгйзводной тока ротора, соедикеншай с сумматором 2 через блок 8 формирования сигнала стабилизации по производной тока ротсэра.
5 Способ осуществляется следующим образом..
Сигналы напряжения статора генератора частрш и тока ротора поступают соответственно на вход блоков 1,3 и 7. Выходные сигналы бло ка 1 в виде отклонения напряжения, гфоизводной напряжения и напряжения реле форсирбвки поступают непосредственно на вход сумматора 2. На выходе блока 3 образуется сигнал откдонёния частота, црступающий на вход блока 5 На выхрде блока 7 образуется сигнал производной тока ротора. Сигналы отклонения частоты.
производной частоты и производной
тока ротора постудают соответственно на блоки 4,/б и 8| представляющие сОбою нелинейные устройства с зонами нечувствительности. Сигна лн регулирования суммируются на входе сумматора 2.
Регулятор, осуществляет регулирование напряжения возбуждения У„ в соответствии с законом
где V - исходйое значение напряже: ния возб яодения, соответствует отсутствию регули5 рования М - доля напряжения аозбужде ния, определяемая сигналом реле форсировкй; К - коэффициент по отклонению напряжения V/ К - коэффициент по производной напряжения V J V . -сигналы дополнительных нелинейных воздействий Г (K, Fft«« f Ai.«tt-6) 6 IEAV«W - «-tfAMH ет t 5 C л«н ,A f ,/i$KT) U$)-1 ч- MH )afju, 1 jg 71) Аии ij c-T) д$Д,Ь.- сигналы соотвё.тственно отклонения частоты, производной частоты и производной тока ротора, oScrN cT постоянные коэффициенты р гулирования} .WM данамические коэффициенты К.дин, регулирования при больших амплитудах колебаний в Чьдмн энергосистеме, В,С,Ь - -зоны нечувствительности. При последовательном введении в закон регулирования еюздействий F(f); FtJil) и f (bf) зона дийамйческой устойчивости увеличива«тся и: граница зоны динамиче ской устойчивости сдвдгается. вверх соответственно от 2 до 4 ;(1 - .граница эоиы отсутствии нелинейных воздействий). При наличии в законе регулирования нелинейных воздействий F() и F () B03h40}nude траектории измёкёния эквивалентных хо9ф: циен1 ов регулирования АДБ или АГВ на фиг« 2. Во изоейание влияния нелинейного канала F (л1) не низкочастотную границы области статической устййчйвости привыборе ис}сод{нЫ1 яас тройки (А) вблизи низкочастотной градицы соотнсшение зон нёчувствитсдльности В и С и динамических коэффициентов , и K otAMh QbtTb выбрано :Фак, 4toGa обеспечивалась траектория АДБ. Экономический эффект от иС:Поль9Ования данного способа определяется условиями р1аботы электрической viautaны в энергосистеме к типрМ электрических маоиин, с увеличением мощности электрических маишн от внедрения способа повышается.
SS/iacmb статической устдйчиУести
Tfamunff шм flfnafiutiecKOiJ fffm Mtipefnit (шт/ихлВканапрамена щ/ff )н1а)
Л/1.г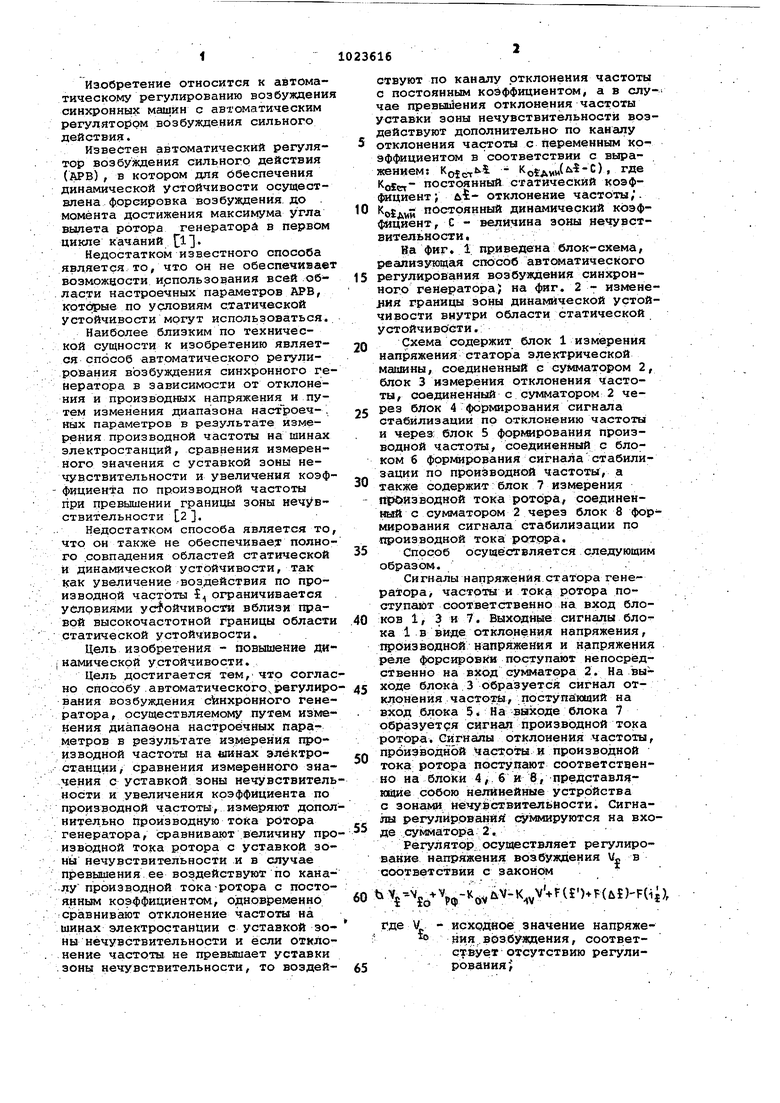
СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА в зависимости от ОткпЬне ния и производных напряжений и путем изменения диапазона настроечных паураметров в результате измерения производной частоты на шинах электростанции, сравнения измеренного значения с уставкой зоны нечувствительности и увеличения коэффициента по производной частоты при превышении границы зоны нечувствительности, о т л и чающий с я тем, что, с целью повышения динамической ус- тойчивости, измеряют дополнительно Производную тока ротора генератора, сравнивают величину тфоизводиой тока ротора с уставкой зоны нечувствительности и в случае превьшения ее Воздействуют по канешу производной тока ротора с постоянным коэффициентом, одновременно сравнивают отклонение частоты на шинах электростанции с уставкой зоны нечувствительности и еслиотклонение частоты не превышает уставки зоны нечувствительности то воздействуют по каналу отклстения частоты с постоянным коэффициентам, а в случае превышения отклонения частоты уставки зоны нечувствительности воздействуют доi полнительно по каналу отклонения частоты с перёьюнньал коэффициентом V) в соответствии с выражением Ko,jj, ( ItojtT ПОСТОЯННЫЙ статический коэФ4 циент; J iотклонение частоты, Ко. постоянный динсцшческий коэф 1я1циент, С . величина зоны нечувствительности. о SD 00 Ф
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Труды ВЭИ | |||
| Вып | |||
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| , 2 | |||
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГКИИРОВАНИЯ ВОЗБУЖДЕНШ СИНХРОННЫХ ГЕНЕРАТОРОВ | 1972 |
|
SU433614A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
