Изобретение относится к электротехнике и может быть использовано в системах автоматического регулирования возбуждения синхронных электродвигателей.
В качестве прототипа выбран способ управлением током возбуждения синхронного электродвигателя [Патент РФ №2239936], при котором измеряют величину cosϕ двигателя и текущее значение его угла нагрузки, поддерживают значение cosϕ на уровне 1,0 путем изменения в соответствующую сторону значения уставки контура регулирования тока возбуждения по отклонению напряжения статорной цепи, осуществляемого по пропорционально-дифференциальному закону, при этом с целью повышения устойчивости и снижения энергетических потерь, задают минимальное и максимальное значения рабочего диапазона угла нагрузки двигателя, при выходе величины угла из заданного диапазона прекращают воздействие на ток возбуждения по отклонению напряжения и ведут управление током возбуждения по величине отклонения угла нагрузки от заданного номинального значения, пока величина отклонения не изменит знак, после чего вновь начинают воздействовать на ток возбуждения по отклонению напряжения статорной цепи. Задают также номинальное и верхнее допустимое значения температуры обмотки ротора, измеряют величины напряжения и тока возбуждения, вычисляют величину производной от тока возбуждения, используя полученные значения и известные величины индуктивности обмотки ротора и температурного коэффициента сопротивления токопроводящего материала обмотки, рассчитывают текущую температуру обмотки. При достижении температурой верхнего допустимого значения ограничивают выходные сигналы контуров автоматического регулирования тока возбуждения уровнем, соответствующим величине тока возбуждения в пределах 0,95-1,0 его номинального значения, пока температура не снизится до номинальной рабочей величины.
В послеаварийных процессах в энергосистеме двигатель находится в зоне неустойчивой работы (угол нагрузки двигателя выходит за Θmax), и возврат в зону устойчивой работы обеспечивается воздействием на ток возбуждения контуром управления по углу нагрузки машины, данное превышения угла нагрузки Θmax обычно имеет кратковременный характер, но при загруженной машине может привести к срыву синхронизации двигателя.
В предлагаемом способе управления током возбуждения синхронного двигателя устранены указанные выше недостатки.
Задача изобретения - повышение устойчивости синхронной работы двигателя при обеспечении минимальных потерь в статоре, предотвращение работы двигателя в зоне неустойчивой синхронизации в послеаварийных процессах энергосистемы и недопущении перегрева ротора.
Указанная задача решается следующим образом.
При выходе из режима форсирования возбуждения двигателя при восстановлении параметров энергосистемы воздействие на ток возбуждения производят контуром плавного снижения тока, с заданным шагом и скоростью, которые определяются задатчиком плавного снижения тока, уменьшает ток возбуждения со значения тока форсировки возбуждения до момента, пока cosϕ двигателя не войдет в заданный диапазон (cosϕзад±Δ), а значение тока возбуждения в заданный диапазон Ifmax-Ifmin, при этом воздействие на ток возбуждения происходит изменением уставки напряжения статорной цепи на входе регулятора напряжения, реализуя подчиненный принцип регулирования. После входа параметров cosϕ и тока возбуждения в границы вышеуказанных диапазонов и нахождения значения угла нагрузки Θ в заданном диапазоне Θmin-Θmax воздействие на ток возбуждения производят контуром по напряжению по отклонению напряжения статорной цепи, при этом уставкой регулятора напряжения статора управляет третий, вспомогательный регулятор, который, удерживая величину cosϕ двигателя вблизи единицы, обеспечивает минимизацию потерь в статорной цепи. Таким образом, в каждый данный момент управление возбуждением осуществляется одним из двух конкурирующих контуров: контуром управления по напряжению статора или контуром управления по углу нагрузки машины, в зависимости от величины этого угла.
Контур управления по напряжению статора содержит четвертый, вспомогательный регулятор плавного снижения тока возбуждения, который формирует уставку напряжения для регулятора напряжения только в послеаварийных процессах энергосистемы. Подчиненное построение данного регулятора с регулятором напряжения обеспечивает безударные переходы управления между третьим и четвертым вспомогательными регуляторами. Регулятор напряжения статора реализует ПД-закон регулирования, чем достигается эффективное демпфирование колебаний ротора при резких изменениях напряжения статора. Верхняя граница заданного диапазона угла нагрузки машины Θmax ограничивает минимальную допустимую по условиям устойчивости величину возбуждения двигателя, а передача управления регулятору угла нагрузки при достижении последним минимальной величины Θmin разрешенного диапазона предотвращает работу двигателя в неэкономичном режиме перевозбуждения при пониженной величине нагрузки на валу двигателя. Ограничение максимально допустимой величины тока ротора может осуществляться путем вычисления температуры его обмотки по измеряемым величинам напряжения на обмотке и производной от тока ротора. При достижении температурой ротора Т верхнего допустимого значения Тmax сигналы каналов автоматического регулирования тока возбуждения ограничиваются уровнем, несколько меньшим номинального тока возбуждения рабочего режима двигателя. После охлаждения ротора до заданной номинальной величины температуры Тном ограничение снимается.
Заявляемое изобретение поясняется чертежом.
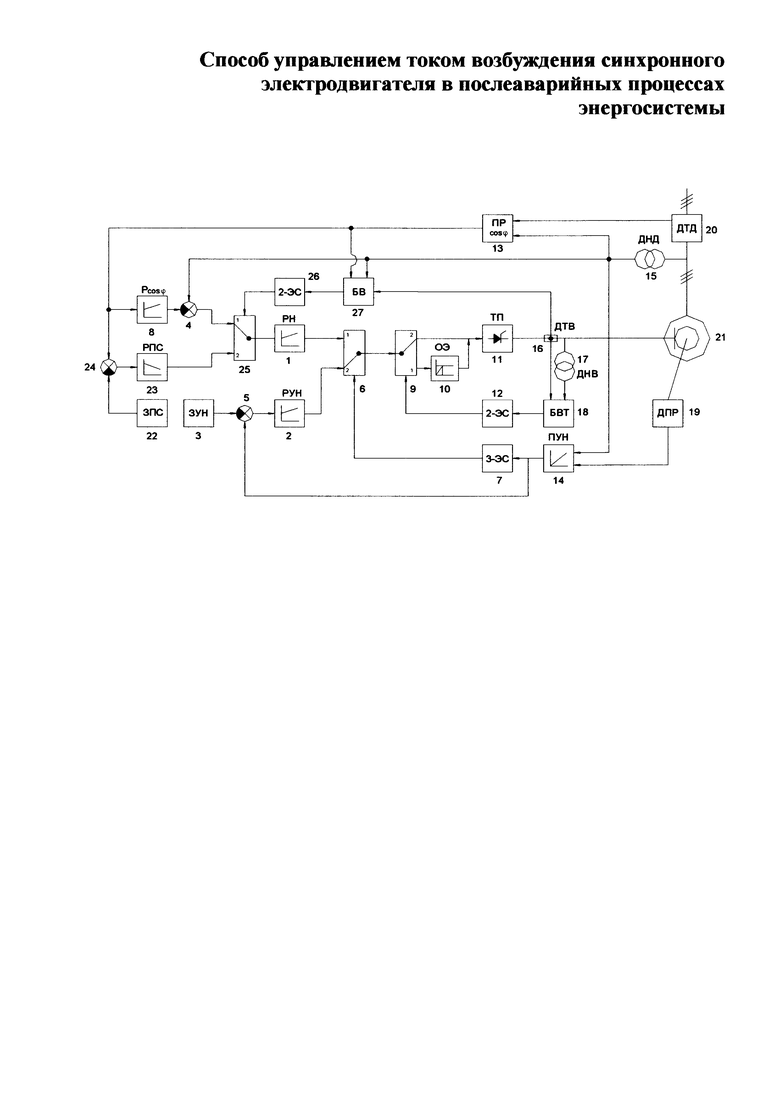
На чертеже приведена функциональная схема устройства, реализующего предлагаемый способ управления током возбуждения синхронного двигателя в послеаварийных процессах энергосистемы.
Устройство содержит регулятор 1 напряжения статорной цепи двигателя 21, регулятор 2 угла нагрузки двигателя 21, задатчик 3 угла нагрузки, первый вычитающий элемент 4, второй вычитающий элемент 5, первый переключающий элемент 6, трехпозиционный элемент сравнения 7, регулятор 8 cosϕ двигателя 21, второй переключающий элемент 9, ограничивающий элемент 10, тиристорный возбудитель 11, двухпозиционный элемент сравнения 12, преобразователь 13 cosϕ двигателя, преобразователь 14 угла нагрузки двигателя 21, датчик 15 напряжения статорной цепи двигателя 21, датчик 16 тока возбуждения, датчик 17 напряжения роторной цепи двигателя 21, блок 18 вычисления температуры обмотки ротора, датчик 19 положения ротора, датчик 20 тока статорной цепи двигателя 21. При этом вход регулятора напряжения 1 подключен к выходу первого вычитающего элемента 4, вычитаемый вход которого подключен к выходу датчика 15 напряжения статорной цепи двигателя 21, а вычитающий вход - к выходу регулятора 8 cosϕ двигателя, выход регулятора 1 напряжения подключен к первому переключаемому входу первого переключающего элемента 6, ко второму переключаемому входу которого подключен выход регулятора 2 угла нагрузки двигателя, вход которого подключен к выходу второго вычитающего элемента 5, вычитаемый вход которого подключен к выходу преобразователя 14 угла нагрузки двигателя 21, а вычитающий - к задатчику 3 угла нагрузки, первый переключающий элемент 6 подключен своим управляющим входом к выходу трехпозиционного элемента сравнения 7, а своим выходом - к входу второго переключающего элемента 9, подключенного своим первым переключаемым выходом к нелинейному ограничивающему элементу 10, управляющим входом - к двухпозиционному элементу сравнения 12, а своим вторым переключаемым выходом, объединенным с выходом элемента 10, - к входу тиристорного возбудителя 11, выход которого подключен к обмотке возбуждения синхронного электродвигателя 21, выходы датчиков 16 и 17 тока возбуждения и напряжения роторной цепи двигателя подключены к информационным входам блока 18 вычисления температуры обмотки ротора, подключенного своим выходом к входу двухпозиционного элемента сравнения 12, первый вход преобразователя 13 cosϕ двигателя 21 и первый вход преобразователя 14 угла нагрузки подключены к выходу датчика 15 напряжения статорной цепи двигателя 21, а вторые входы преобразователей 13 и 14 соответственно - к выходу датчика 20 тока статорной цепи и к выходу датчика 19 положения ротора электродвигателя 21. Устройство дополнительно содержит регулятор 23 плавного снижения тока возбуждения двигателя 21, задатчик 22 плавного снижения тока возбуждения, третий вычитающий элемент 24, третий переключающий элемент 25, двухпозиционный элемент сравнения 26. При этом вход регулятора 23 плавного снижения тока возбуждения подключен к выходу третьего вычитающего элемента 24, вычитаемый вход которого подключен к выходу преобразователя 13 cosϕ двигателя 21, а вычитающий вход - к выходу задатчика 22 плавного снижения тока возбуждения двигателя 21, выход регулятора 23 плавного снижения тока возбуждения подключен ко второму переключаемому входу третьего переключающего элемента 25, к первому переключаемому входу которого подключен выход первого вычитающего элемента 4, третий переключающий элемент 25 подключен своим управляющим входом к выходу двухпозиционного элемента сравнения 26, выход третьего переключающего элемента 25 подключен ко входу регулятора 1 напряжения статорной цепи двигателя 21, выходы датчиков 15 и 16 напряжения статорной цепи двигателя и тока возбуждения роторной цепи двигателя и выход преобразователя 13 cosϕ двигателя 21 подключены к информационным входам блока 27 вычисления снижения тока возбуждения, выход которого подключен к управляющему входу двухпозиционного элемента сравнения 26.
Управление режимом работы синхронного двигателя 21 осуществляется посредством изменения тока в обмотке возбуждения, которая подключена к выходу тиристорного возбудителя 11. Управление величиной тока возбуждения путем изменения управляющего сигнала на входе тиристорного возбудителя 11 осуществляет один из двух контуров регулирования в зависимости от положения переключающего элемента 6, подключенного своим выходом через второй переключающий элемент 9 к входу тиристорного возбудителя 11. В положении <1> переключателя 6 к входу тиристорного возбудителя 11 подключается выход регулятора 1 контура управления током возбуждения по отклонению напряжения статора. В положении <1> переключателя 25 к входу регулятора 1 подключается выход вычитающего элемента 4, в положении <2> переключателя 25 к входу регулятора 1 подключается выход регулятора 23 плавного снижения тока возбуждения, на вход которого поступает сигнал с вычитающего элемента 24, на вычитаемый вход которого поступает сигнал cosϕ с выхода преобразователя 13, а на вычитающий - сигнал задания скорости и шага снижения, вырабатываемый задатчиком 22 плавного снижения тока возбуждения, при этом задание скорости и шага снижения тока возбуждения осуществляется изменением уставки cosϕ для регулятора 23 плавного снижения тока возбуждения. Сигнал отклонения напряжения статора на входе регулятора <1> переключателя 25 формируется вычитающим элементом 4, на вычитаемый вход которого поступает сигнал с датчика 15 напряжения статора, а на вычитающий вход - сигнал уставки по напряжению, вырабатываемый регулятором 8 косинуса угла двигателя. Текущее значение cosϕ на вход регулятора 8 поступает с выхода преобразователя 13, который формирует его по сигналам, поступающим на его входы с системы датчиков 15 напряжения и 20 тока статорной цепи двигателя. Регулятор 8 путем изменения уставки регулятора 1 по отклонению напряжения осуществляет стабилизацию cosϕ двигателя на уровне единицы по пропорционально-интегральному закону, отрабатывая любые возмущения в режимах работы двигателя 21, приводящие к изменению потребляемой им реактивной мощности, и обеспечивает таким образом минимизацию потерь в статорной цепи двигателя. Регулятор 1 тока возбуждения по отклонению напряжения статорной цепи отрабатывает как изменение самой уставки по напряжению, получаемой им от регулятора 8 через вычитающий элемент 4, так и любые отклонения напряжения на шинах статора от величины уставки. Пропорционально-дифференциальный закон регулирования, реализуемый регулятором 1, обеспечивает повышенную динамическую устойчивость режимов работы двигателя 21 за счет эффективного демпфирования быстропеременных возмущений по напряжению на шинах статора. Регулятор 1 осуществляет управление током возбуждения при значениях угла нагрузки двигателя, находящихся в диапазоне Θmin-Θmax. При выходе угла нагрузки из указанного диапазона по команде трехпозиционного элемента сравнения 7, выход которого подключен к управляющему входу переключателя 6, последний устанавливается в положение <2>, при котором к управляющему входу тиристорного возбудителя 11, проходя через переключающий элемент 9, подключается выход регулятора 2 угла нагрузки двигателя. Текущее значение угла нагрузки на входе элемента сравнения формируется преобразователем 14 угла нагрузки поступающими на его измерительные входы сигналами напряжения статора с датчика 15 и положения вектора магнитного момента ротора с датчика 19. Выход преобразователя угла нагрузки 14 подключен также к вычитаемому входу разностного элемента 5, к вычитающему входу которого подключен выход задатчика 3 угла нагрузки. Сигнал отклонения угла нагрузки от заданного значения Θзад с выхода вычитающего элемента 5 поступает на вход регулятора 2 угла нагрузки. Регулятор 2 осуществляет отработку отклонения угла по ПИД-закону. Как только величина отклонения сменит знак, на выходе элемента сравнения 7 вырабатывается командный сигнал перехода переключателя 6 из состояния <2> в состояние <1> и управление током возбуждения передается регулятору 1 по отклонению напряжения статора. Передача управления от регулятора 1 регулятору 2 при увеличении угла нагрузки до значения Θmax предотвращает выход двигателя из области устойчивого синхронного хода, а переход управления током возбуждения от регулятора 1 к регулятору 2 при пониженных до значения Θmin величинах угла нагрузки обеспечивает экономичное соответствие количества потребляемой электроэнергии величине нагрузки на валу двигателя. На информационные входы блока 27 вычисления снижения тока возбуждения поступают сигналы с датчика 16 тока возбуждения If, преобразователя 13 cosϕ и датчика напряжения 15 цепи статора двигателя. Блок 27 вычисления определяет момент возникновения и окончания условий для плавного снижения тока возбуждения. Выход блока 27 вычисления подключен ко входу двухпозиционного элемента сравнения 26, выход которого подключен к управляющему входу переключающего элемента 25. На выходе элемента сравнения 26 вырабатывается командный сигнал перехода переключателя 25 из состояния <1> в состояние <2> - воздействие на ток возбуждения производится вспомогательным регулятором 23 плавного снижения. Передача управления от вспомогательного регулятора 8 вспомогательному регулятору 23 предотвращает работу двигателя 21 в зоне неустойчивого синхронного хода. Переход управления током возбуждения от вспомогательного регулятора 23 к вспомогательному регулятору 8 происходит в установившемся режиме работы двигателя в зоне устойчивого синхронного хода.
Для ограничения величины тока возбуждения при работе регуляторов 1 и 2 по условию недопущения перегрева ротора осуществляется непрерывный контроль температуры обмотки ротора путем косвенного измерения активного сопротивления обмотки. Расчет текущего значения температуры Т обмотки выполняется вычислительным блоком 18, на информационные входы которого поступают сигналы с датчика 16 тока возбуждения If и датчика 17 напряжения возбуждения Uf. Выход блока 18 подключен к входу двухпозиционного элемента сравнения 12. На выходе блока 18 формируется сигнал, пропорциональный значению температуры Т обмотки ротора, определяемому из системы уравнений. До тех пор, пока температура Т остается ниже величины верхнего допустимого значения Тmax, на выходе элемента сравнения 12, подключенного к управляющему входу переключателя 9, действует командный сигнал, удерживающий переключатель 9 положении <2>, при котором сигналы управления с регуляторов 1 или 2 на выходе переключателя 6 проходят через переключатель 9 непосредственно на вход тиристорного возбудителя 11. В случае повышения температуры Т до значения Тmax на выходе элемента сравнения 12 устанавливается сигнал, переводящий переключатель 9 в положение 1, при котором управляющие сигналы с регуляторов 1 и 2 поступают на вход тиристорного возбудителя 11, проходя через ограничивающий элемент 10. При величине сигнала Х9 на входе элемента 10, меньшей заданного максимального значения Х9 макс, сигнал на его выходе F10 (Х9) равен по величине входному сигналу. При значениях сигнала на входе, превышающих величину Х9 макс, выходной сигнал элемента 10 ограничивается величиной Х9 макс, соответствующей значению тока возбуждения на выходе тиристорного возбудителя в заданном диапазоне 0,95-1,0 номинальной величины тока возбуждения. Следовательно, после перехода переключателя 9 в положение <1>, инициированного повышением температуры обмотки ротора до допустимого верхнего значения, величина тока возбуждения на выходе тиристорного возбудителя 11 всегда меньше или равна своему номинальному значению. После остывания обмотки ротора до номинального значения температуры Тном на выходе элемента сравнения 12 устанавливается командный сигнал, возвращающий переключатель 9 в положение <2>.
Таким образом, предлагаемый способ управления током возбуждения синхронного двигателя обеспечивает минимальные потери энергии в двигателе, повышение динамической и статической устойчивости синхронного режима его работы и повышение точности ограничения максимального тока возбуждения по условию предотвращения перегрева его ротора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ТОКОМ ВОЗБУЖДЕНИЯ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2239936C2 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ СИНХРОННЫХ ДВИГАТЕЛЕЙ НАСОСНЫХ СТАНЦИЙ | 2024 |
|
RU2839885C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ СИНХРОННОГО ДВИГАТЕЛЯ | 1997 |
|
RU2122277C1 |
| Агрегат бесперебойного электроснабжения | 1990 |
|
SU1739439A1 |
| Агрегат бесперебойного электроснабжения | 1988 |
|
SU1658281A1 |
| Система бесперебойного электроснабжения | 1989 |
|
SU1677778A1 |
| РЕГУЛЯТОР ТЕМПЕРАТУРЫ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2214929C1 |
| Электропривод с синхронным двигателем | 1972 |
|
SU553948A3 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2297090C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ РОЛИКОВЫХ ЦЕПЕЙ | 2008 |
|
RU2362983C1 |
Изобретение относится к области электротехники и может быть использовано в системах автоматического регулирования возбуждения синхронных электродвигателей. В способе управления током возбуждения синхронного двигателя в послеаварийных процессах энергосистемы измеряют величину cosϕ двигателя и текущее значение его угла нагрузки, поддерживают значение cosϕ на уровне 1,0 путем изменения в соответствующую сторону значения уставки контура регулирования тока возбуждения по отклонению напряжения статорной цепи, осуществляемого по пропорционально-дифференциальному закону, задают минимальное и максимальное значения рабочего диапазона угла нагрузки двигателя, при выходе величины угла из заданного диапазона прекращают воздействие на ток возбуждения по отклонению напряжения и ведут управление током возбуждения по величине отклонения угла нагрузки от заданного номинального значения, пока величина отклонения не изменит знак, после чего вновь начинают воздействовать на ток возбуждения по отклонению напряжения статорной цепи. В послеаварийных процессах энергосистемы управление током ведут вспомогательным регулятором плавного снижения, построенным по подчиненной схеме регулирования с регулятором напряжения, с заданной скоростью и шагом, снижая ток возбуждения и осуществляя контроль максимального и минимального тока возбуждения, cosϕ и углов нагрузки машины Θ, в совокупности исключая перерегулирование тока возбуждения и, как следствие, возникновение асинхронного хода. 1 з.п. ф-лы, 1 ил.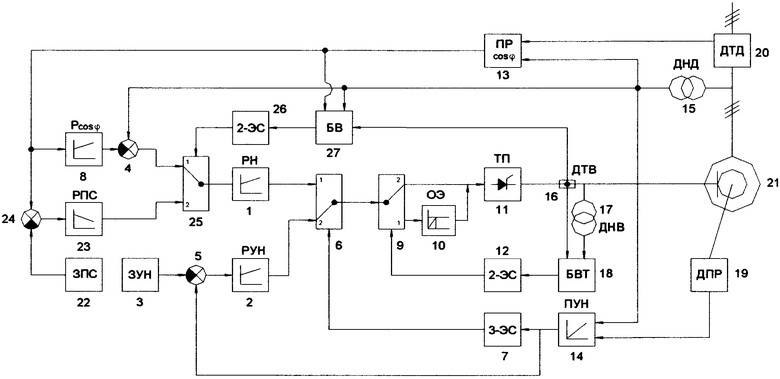
1. Способ управления током возбуждения синхронного двигателя в послеаварийных процессах энергосистемы, при котором измеряют величину cosϕ двигателя и текущее значение его угла нагрузки, поддерживают значение cosϕ на уровне 1,0 путем изменения в соответствующую сторону значения уставки контура регулирования тока возбуждения по отклонению напряжения статорной цепи, осуществляемого по пропорционально-дифференциальному закону, при этом задают минимальное и максимальное значения рабочего диапазона угла нагрузки двигателя, при выходе величины угла из заданного диапазона прекращают воздействие на ток возбуждения по отклонению напряжения и ведут управление током возбуждения по величине отклонения угла нагрузки от заданного номинального значения, пока величина отклонения не изменит знак, после чего вновь начинают воздействовать на ток возбуждения по отклонению напряжения статорной цепи, отличающийся тем, что в послеаварийных процессах энергосистемы управление током ведут вспомогательным регулятором плавного снижения построенным по подчиненной схеме регулирования с регулятором напряжения с заданной скоростью и шагом, снижая ток возбуждения и осуществляя контроль максимального и минимального тока возбуждения, cosϕ и углов нагрузки машины Θ, в совокупности исключая перерегулирование тока возбуждения и, как следствие, возникновение асинхронного хода.
2. Способ управления током возбуждения синхронного двигателя по п. 1, при котором задают номинальное и верхнее допустимое значения температуры обмотки ротора, измеряют величины напряжения и тока возбуждения, вычисляют величину производной от тока возбуждения, используя полученные значения и известные величины индуктивности обмотки ротора и температурного коэффициента сопротивления токопроводящего материала обмотки, рассчитывают текущую температуру обмотки и при достижении ею верхнего допустимого значения ограничивают выходные сигналы контуров автоматического регулирования тока возбуждения уровнем, соответствующим величине тока возбуждения в пределах 0,95-1,0 его номинального значения, пока температура не снизится до номинальной рабочей величины.
| СПОСОБ УПРАВЛЕНИЯ ТОКОМ ВОЗБУЖДЕНИЯ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2239936C2 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ СИНХРОННОЙ МАШИНЫ | 2002 |
|
RU2242080C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2385528C1 |
| Способ автоматического определения температуры кристаллизации бензола | 1987 |
|
SU1430844A1 |
| DE 102007057499 A1, 01.05.2013 | |||
| US 4297739 A, 27.10.1981 | |||
| WO 2008142756 A1, 27.10.1981 | |||
| СПОСОБ РАЗРАБОТКИ НЕФТЯНОЙ МАЛО РАЗВЕДАННОЙ ЗАЛЕЖИ | 2015 |
|
RU2587661C1 |
| CN 10404087 A, 10.09.2014. | |||

