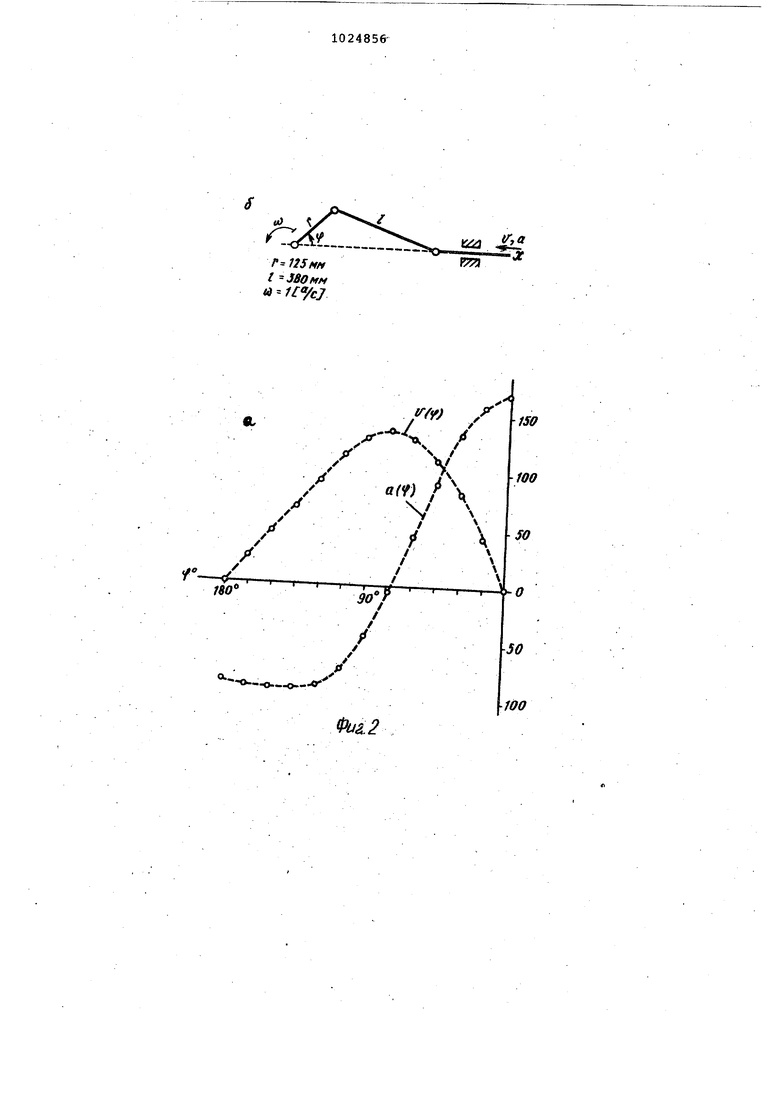
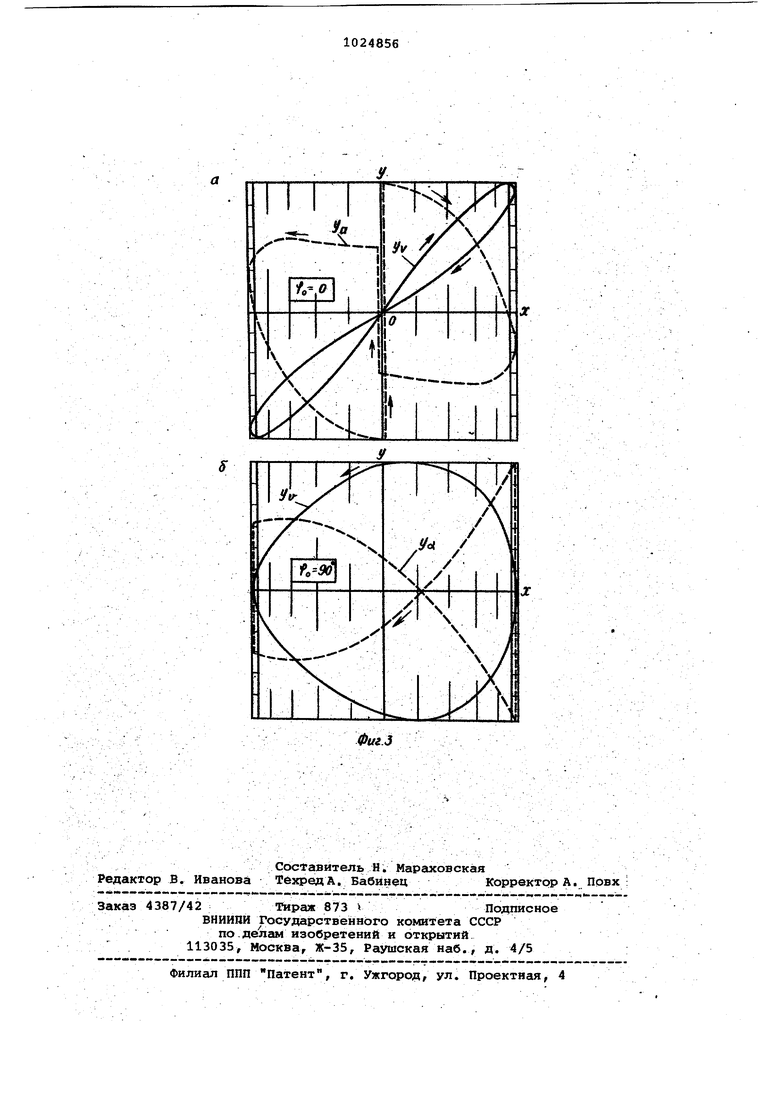
Изобретение относится к контрольно-измерительной технике и может использовано в индивидуальном, лоточно-массовом и автоматизированном производстве датчиков линейной скорости и ускорения тел для тарировки, определения погрешности и снятия статических и динамических характеристик этих датчиков. Известен стенд, предназначенный для испытания индукционных измерителе.й скорости, в котором имитатором движущегося тела служит бесконечная металлическая полоса ij. однакоиспытание индукционных датчиков скорости на этом стенде может проводиться только в стационар ном режиме, при постоянной скорости имитатора движущегося тела. Наиболее близким к изобретению по технической сущности является стенд, содержащий имитатор движущейся среды, соединенный с управляемым двигателем, испытуемый измеритель скорости, расположенный вблизи имитатЪра1 и соединённый регистратором измереНИИ, и блок разности 2. . Недостатком известного стенда является также невозможность измерения погрешности испытуемого измерителя скорости в динамическом режиме, Так как в большинстве случаев пра тики скорость и ускорение движущихся тел изменяются с -течением времени в широких пределах, то следует считать что основными характеристиками датчи ков скорости и ускорения являются динамические. Однако для снятия дина мических характеристик датчиков изве стные испытательные стенды не пригод яы,. Целью изобретения является расширение функциональных возможностей стенда. Эта цель достигается тем, что в стенде, :содёржащем имитатор движущей ся среды, соединенный с управляемом двигателем, испытуемый измеритель ск рости, расположенный вблизи имита-тора и соединенный с регистратором измерений, и блок разности, имитатор движущейся среды выполнен в виде . сменной рейки, жестко связанной с вв денным кривошипно-шатунным.механизмом. На фиг. 1 схематически изображен испытательный стенд для определения погрешностей и тарировки датчиков ли нейной скорости и ускорения тeлf на фиг. 2а -. теоретические (эталонные) характеристики - графики зависимости скбрости V и ускорения а ползуна кри вошипно-ползунного мехс1низма от угла поворота кривошипа; на фиг. 26 скелетная схема и параметры этого ме ханизма; на фиг. За и б - теоретичес кие (эталонные) характеристики движенил ползуна того же механизма; (f)3 и yQa (f )J в зависимости от синуса угла поворота кривошипа xfs I n(vf ,) (для двух значений угла ( где у, X - текущие координаты, %- сдвиг фаз между колебаниями ползуна и кривошипа. Кривые, изображенные на фиг. За и б, называют также фигурами Лиссажу или фазовыми портретами. Эталонные характеристики ползуна механизма (фиг. 2 и 3) могут быть получены экспериментально, например, на экране осциллографа с помощью линейной (пилообразной) или синусоидальной горизонтальной развертки луча соответственно. Испытательный стенд (фиг. 1) содержит управляемый электродвигатель 1, приводящий в .движение плоский кривошипно-ползунный механизм с ведущим звеном - криводипом 2, шатуном 3 и ведо1ф1м звеном - ползуном 4, скользящим в п6дшипиикс1х 5, прикрепленную жестко параллельно к ползуну имитирующую движущееся тело сменную рейку 6, вблизи которой расположен испытуемый датчик 7, осциллограф или самопишущий прибор 8, блок хранения эталонных характеристик 9 ползуна механизма, устройство 10 для контроля постоянства угловой скорости кривошипа, синхронизированный с оборотами электродвигателя -генератор пилообразного и синусоидального напряжений (генератор разверток) 11, устройство сфав нения (блок разности) 12 и контрольный прибор 13. Выход датчика 7 соединен с входом усилителя вертикального отклонения луча осциллографа 8, а также с одним из входов разностного блока 12. Выход генератора развёрток 11 под.ключен к входу усилителя горизонтального отклонения луча осциллографа 8. Выход блока эталонных характеристик. 9 соединен с вторым входом разностного блока 12, выход которого подключен к контрольрому прибору 13. Испытательный стенд для определения погрешности и тарировки, напри- мер, индукционных датчиков линейной скорости работает следующим образом. При вращении электродвигателя 1 с постоянной угловой скоростью tOf 1iaпра19ляющая метгшлическая рейка 6 имеете с ползуном 4 совершает вдоль прямой сложное, периодическое неравномерное (несинусоидальное) движение, параметры которого - линейные -скорость и ускорение - могут быть получены либо из блока эталонных характеристик 9, либо непосредственно оТ механизма, например резистивного прецизионного датчика (не показан) преобразующего скорость и ускорение ползуна или рейки 6 в пропорциональное электрическое эталонное напряжение Если это напряжение подается на второй вход блока разности 12, то блок 9 отключается. Движущаяся металлическая рейка б индуктирует в испытуемом датчике 7 рабочее электрическое напряжение, пропорциональное скорости движения ползуна 4. В блоке разности 12 это рабочее напряжение сравнивается с эталонньм напряжением. Уровень эталонного напряжения выбирают таким,, чтобы разностный сигнал, измеря емый контрольным прибором 13, был минимальным. По величине разностного сигнсша судят о величине погрешности датчика линейной скорости при дан ной фиксированной угловой скорости Ш| кривошипа механизма. Эксперимент повторяют несколько раз при различных величинах угловой скорости ц; , что позволяет произвести арировку датчика. Одновременно производится визуаль. ное сравнение изображения характер истик испытуемого датчика, воспроизводимых самопишущим прибором или лучем на экране осциллографа, с эталонны-: ми характеристиками ползуна механизма. При этом в зависимости от вида применяемой горизонтальной развертки (пилообразнс1я или синусоидальная) в качестве эталонных динамических характеристик ползуна механизма исПопьзуют либо зременные характеристики V(P), а(р) (фиг.2), либо фазовые портретк (фигуры Лиссажу) у.(х) (фиг.З) Статические характеристики датчика можно получить сечением семейства динамических характеристик V(lf) f const на уровне if const. Таким образом, поскольку скорость и ускорение ползуна механизма, уста новленного на испытательном стенде, определяются аналитически, ползун можно использовать как эталон линейного движения, периодически воспроизводящий свои характеристики. В результате исчезает необходимость в высокоточном и дорогостоящем контрольно-из,мерительном устройстве. Незначительные конструктивные изменения или переналадка механизма (например эксцентричное соединение кривошипа с валом электродвигателя) позволяют изменять параметры движения ползуна в широких пределах и подбирать режи1Лз1 . движения имитатора движущегося тела, близкие тем,которые требуются условиями эксплуатации датчика. При необходимости кривошипно шатунный механизм легко заменить другим плоским механизмом аналогичного назначения с требуемыми параметрами движения. Таким образом, выполнение HNWTaтора движущейся среды в виде сменной рейки, жестко связанной с введённым кривошипно-шатунным механизмом, позволяет произвести испытание и тарировку датчиков линейной скорости и ускорений в динамических режимах, что расширяет функциональные возможности испытательного стенда,
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХСТЕПЕННОЙ СТЕНД ДЛЯ ЗАДАНИЯ УГЛОВЫХ КОЛЕБАНИЙ | 2007 |
|
RU2367921C2 |
| Стенд линейных гармонических ускорений | 1975 |
|
SU607147A1 |
| Стенд для калибровки и испытаний датчиков параметров движения | 2023 |
|
RU2818234C1 |
| Динамический испытательный стенд | 1985 |
|
SU1303946A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ПНЕВМАТИЧЕСКИХ ШИН И УПРУГИХ ЭЛЕМЕНТОВ ТРАНСПОРТНЫХ СРЕДСТВ | 1998 |
|
RU2133459C1 |
| Стенд для динамических испытаний пневматической шины | 1983 |
|
SU1132177A1 |
| Стенд для испытаний гироскопических приборов | 1980 |
|
SU1059427A1 |
| СТЕНД ДЛЯ ДИАГНОСТИРОВАНИЯ САЙЛЕНТБЛОКОВ ПОДВЕСКИ АВТОТРАНСПОРТНЫХ СРЕДСТВ | 2015 |
|
RU2616233C1 |
| Стенд для испытания рычажно-лопастных гидроамортизаторов | 2022 |
|
RU2779327C1 |
| Стенд для динамических испытаний пневматической шины | 1990 |
|
SU1795336A1 |
ИСПЫТАТЕЛЬНЫЙ СТЕНД, содержгиций иьютатор движущейся среды, соединенный с управляемым двигателем, испытуемый измеритель скорости, расположеиный 1 вблиэ и: имитатора и соединенный с регистратором измерений, и блок разности, отличающийс я тем, что, с целью расширения функционсшьных возможностей стенда, в нем имитатор движущейся среды выполнен в виде сменной рейки, жестко связанной с введенным кривошипно-шатунным механизмом.