(54) СТЕНД ЛИНЕЙНЫХ ГАРМОНИЧЕСКИХ УСКОРЕНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд линейных гармонических ускорений | 1979 |
|
SU857885A1 |
| Вибровозбудитель | 1989 |
|
SU1771823A1 |
| Стенд для испытаний подвижных элементов конструкций | 1978 |
|
SU688843A1 |
| Вибровозбудитель | 1988 |
|
SU1588445A1 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 1995 |
|
RU2123627C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ПНЕВМАТИЧЕСКИХ ШИН И УПРУГИХ ЭЛЕМЕНТОВ ТРАНСПОРТНЫХ СРЕДСТВ | 1998 |
|
RU2133459C1 |
| Способ и устройство компенсации колебаний для колесно-шагового движителя | 2019 |
|
RU2744646C2 |
| Стенд для испытания изделий на воздействие импульса ускорения | 1990 |
|
SU1742662A1 |
| ДВУХСТЕПЕННОЙ СТЕНД ДЛЯ ЗАДАНИЯ УГЛОВЫХ КОЛЕБАНИЙ | 2007 |
|
RU2367921C2 |
| Стенд для испытания торсионных валов на усталость при кручении | 1980 |
|
SU926552A1 |
1
Изобретение относится к области испытательной техники и может быть использовано для испытаний гироскопов и акселерометров путем воздействия на них низкочастотным линейным ускорением большой амплитуды.
Известны механические испытательные стенды, преобразующие при помощи кривошипно-ползунного механизма равномерное вращение вала кривошипа в возвратно-поступательное прямолинейное движение испытательного стола. Основными недостатками таких стендов являются малая амплитуда перемещений (обычно О 30 мм) и отсутствие строго гармонического закона движения испытательного стола.
Теоретически чистый гармонический закон движения испытательного стола имеет место в стендах, где длина шатуна равна длине кривошипа. Примером такого стенда является устройство ij/ где кривошипно-ползунный механизм с равньоии шатуна и крвошипа конструктивно выполнен в виде сдвоенной планетарной зубчатой передачи. Первая планетарная передача сообщает вращение шатуну, а вторая испытательному столу. Передаточное число этой кинематической цепи подоб
рано таким, что испытательный стол совершает возвратно-поступательное прямолинейное перемещение по гармоническому закону без помощи направляющих на величину хода до 2000 мм.
Однако длинная и недостаточно жесткая кинематическая цепь зубчатых конических колес, установ.г1енных на шлицевых валах регулируемой длины, погрешности изготовления и сборки не позволили в достаточной степени реализовать возможности принципиальной схемы: клир-фактор по ускорению составил около 8%.
Наиболее близким к изобретению по технической сущности является стенд, который имеет короткую и жесткую кинематическую цепь, так как равноплечий кривошипно-ползунный привод конструктивно выполнен в виде одинарной зубчатой эпициклической передачи внутреннего зацепления с диаметром сателлита (шатунного колеса), равным радиусу неподвижного колеса. Отсутствие сдвоенной планетарной передачи в приводе стола потребовало введения в конструкцию прецизионной плоской направляющей для предотвращения проворота испьатательного стола (под действием сил трения или неуравновешенкости испытательного стола) относительно пальца сателлита, на подшипниках которого он установлен 2.
Существенным недостатком данного стенда является наличие двух работающих одновременно жестких кинематических цепей, обеспечивающих движение испытательного стола: с одной стороны это кривоишпно-полэунный механизм с направлякхцей, а с другой - зубчатая эпициклическая передача. Ошибки изготовления и сборки механизмов стенда приводят к некоторому отклонению от прч 4олинейности в движении стола и к противодействию кинематических цепей работе друг друга, что вызывает либо отход стола от плоской направЛяюЬ|ей и его угловые колебания в образовавшемся зазоре, либо деформацию всей кинематической цепи из-за противодействия направляющей, установленной на жесткой траверзе.
Все это ухудшает точность воспроизводимого закона двлжеиия и приводит к появлению боковых угловых и -линейных колебаний испытательного стола.
Целью изобретения является уменьшение угловых колебаний и увеличение точности прямолинейного перемещения.
Это достигается благодаря тому, что в предлагаемом стенде прецизионны направляющие стола выполнены полуэак/жнутьюта, а испытательньй стол закреплен ка опорном шарнире сателлита (шатуна) с помощью упругой связи. Упругая связь выполнена в виде Н-образног блока из трех пакетов взаимно перпендикулярных разрезных плоских пружин, который имеет высокую жесткость в направлении движения стола и обладает хорошей податливостью в любом из пяти других возможных линейных и угловых Малых колебаний пальца шатуна относи.тельно испытательного стола. .
Регулируемая величина силового замыкания-стола и полуза1 нутых направляющих осуществляется при помощи витой цилиндрической пружины.
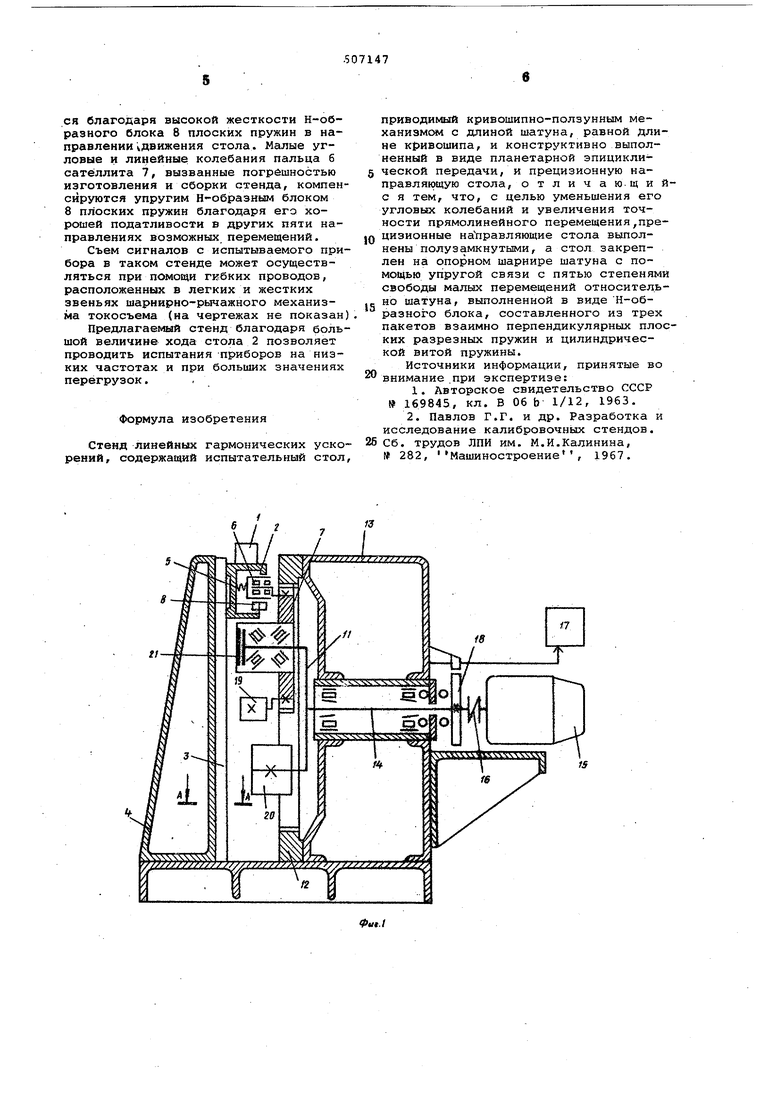
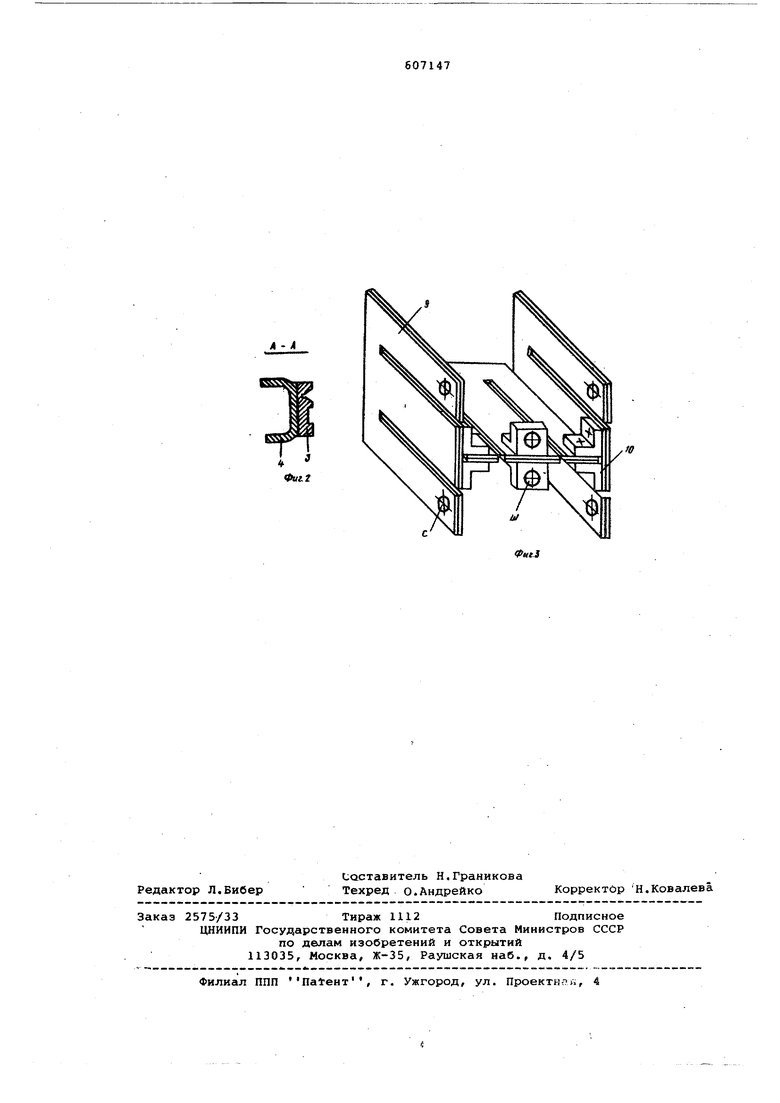
На Фиг. 1 представлена конструктивно-кинематическая схема описываемого стенда; на фиг. 2 -,поперечный разрез полузамкнутой направляющей; на фиг.З Н-образный блок плоских разрезных пружин, соединяющий испытательный сто с опорным шарниром сателлита.
Испытываемый прибор 1 расположен на испытательном столе 2 (фиг. 1), который может перемещаться вдоль прецизионной направлякяцей 3, -выполненной полузамкнутой (фиг. 2) и установленной на жесткой .траверзе 4. Для лучшего учета влияния вектора ускорения земного-тяготения и обеспечения техники безопасности направление движения испытательного стола 2 принято вертикальным. Витая цилиндрическая пружина 5 осуществляет регулируемое
силовое Зс1мыкание стола 2 и направляющей 3. Связь стола 2 с пальцем 6 опорного шарнира сателлита 7 (шатуна) вЕШОЛнена упругой в виде Н-образного блока 8 трех взаимно перпендикулярных пакетов 9 разрезных плоских пружин, соединенных угольниками 10 (фиг. 3). Места присоединения упругого блока 8 к столу 2 обозначены буквой С, а буквой Ш - места присое динения к Опорному шарниру сателлита 7. Такая конструкция упругого блока 8 имеет высокую жесткость в направлении движения стола 2 и обеспечивает хорошую податливость в любом другом из пяти возможных малых перемещений (линейных и угловых) стола 2 относительно сателлита 7. Сателлит 7 установлен на подвижной оси водила 11 планетарной эпициклической, передачи. Ее неподвижное колесо 12 закреплейона станине 13 соосно шпинделю 14. Радиус начальной окружности зубчатого колеса 12 равен диаметру сателлита 7, а ось пальца 6 опорного шарнира стола 2 находится на начальной окружности сателлита 7. Тем самым и реализованасхема кривошипно-пол унного механизма с длиной кривоши-. па, равной длине шатуна.
Электродвигатель 15 постоянного тока через муфту 16, шпиндель 14 и эпициклическую передачу приводит в двжение стол 2 с испытываег/ШЕМ прибором 1. Замкнутая система электропривода 17 содержит импульсный датчик угла поворюта 18, предназначенный для работы в цепи обратной связи по регулированию скорости электродвигателя 15.
С целью уравновешивания масс стола 2 и испытываемого прибора 1 введен противовес 19, а для уравновешивания главного вектора сил инерции служит противовес 20. Регулируемый фрикционный тормоз 21 в процессе раббты стенда предотвращает отход друг от друга одноименных профилей зубьев сателлита 7 и неподвижного колеса 12 под действием возможных колебаний момента сил относительно оси сателлита 7.
Работает стенд следующим образом. При задании электроприводом 17 определенной равномерной скорости вращения о; валу электродвигателя 15 через планетарную эпициклическую передачу получает перемещение стол 2 с испытываемым прибором 1. Ускорение движения стола 2 изменяется по гармоническому закону.
W-2ru Co«u t
где. т - радиус водила 11 и сателлита 7, и - угловая скорость вращения водила 11, рад/с.
Это перемещение стола 2 по прецизионным направляющим 3 осуществляется благодаря высокой жесткости Н-образного блока 8 плоских пружин в направлении движения стола. Малые угловые и линейные колебания пальца 6 сателлита 7, вызванные погрешностью изготовления и сборки стенда, компенсируются упругим Н-образным блоком 8 плоских пружин благодаря его хорошей податливости в других пяти направлениях возможных перемещений.
Съем сигналов с испытываемого прибора в таком стенде может осуществляться при помощи гибких проводов, расположенных в легких и жестких звеньях шарнирно-рычажного механизма токосъема (на чертежах не показан)
Предлагаемый стенд благодаря большой величине хода стола 2 позволяет проводить испытания -приборов на низких частотах и при больших значениях перегрузок. ,
Формула изобретения
Стенд линейных гармонических ускорений, содержащий испытательный стол,
приводимый кривошипно-ползунным механизмом с длиной шатуна, равной длине кривошипа, и конструктивно выполненный в виде планетарной эпициклической передачи, и прецизионную направлянедую стола, отличаю.щийс я тем, что, с целью уменьшения его угловых колебаний и увеличения точности прямолинейного перемещения,прецизионные направляющие стола вьтолнены полузамкнутыми, а стол закреплен на опорном шарнире шатуна с помощью упругой связи с пятью степенями свободы малых перемещений относительно шатуна, выполненной в виде Н-образного блока, составленного из трех пакетов взаимно перпендикулярных плоских разрезных пружин и цилиндрической витой пружины.
Источники информации, принятые во внимание при экспертизе:
Сб. трудов ЛПИ им. М.И.Калинина, № 282, Машиностроение , 1967.
Л -Л
Фиг. 2
