Изобретение относится к промысловой геофизике и может &1ть использовано для контроля параметров траектории скважины в процессе бурения.
Известно устройство для контроля5
комплекса параметров траектории скважины и направления отклонителя, содержащее датчик угла кривизны, датчик угла направления отклонителя и датчик азимута Cl .10
Недостатком устройства является низкая точность ориентирования рамки в Плоскости наклона при малых углах, вследствие во {икновения моментов сухого трения в осях подвеса маятников, и tS отсутствие виброустойчивости.
Известно также устрсйствр для определения кривизны скважины, соде кашеё заполиенный жидкостью корпус, в котором размешены ур новешенные по плавучео- 20 ти и дифференту рамка-поплавок с экспен {жчным грузом и закрепленный в ней маятник-поплавок с преобразователями 23.
Недостатком этого устрсйства является низкая виброустойчивость, обусловлен- 25. ная взаимным расположением рамки-поплавка к маятника-чюплавка. Увеличение сибро- устойчивости устройства связано с увеличением габаритов и веса чувствительного леэмента, что приводит к увеличению сил ЗО трения в осях подвеса, к снижению точности измерения.
Известен также инклинометр, содержащий кортус, в котором установлена на опорах рамка с эксцентричным грузом 35 и зенитный маятник, выполненные в виде поплавков, урамювешенных по плавучести и дифференту в жидкости, причем на нарогжной поверкности рамки, ответной внутренней поверхности кортуса, 40 ной поверхности V и ответной внутренней повершости рамки выполнены чередующиеся выступы и канавки, причем каждый вьютуп установлен в соответствующей; канавке с зазором.45
Уравновещивание {:вмки-пош1авка и маятника-поплавка по плавучести и дифференту позволяет {ачительно снизить моменты трения в осях подвеса и, следовательно, увеличить точность о ентиро- Q вания маятников при малых углах назслона; выполнение псшерхностей рамки, меат ника и корпуса в форме ступенчатой конструкции позволяет увеличить вибропрочность в широком диапазоне изменения температур в скважине З
Однако взаимное расположение рамки с эксцентричным и зенитного
маятника в известном инклинометре препятствует созданию маятника виброустойчивых преобразователей, так как для увеличения виброустойчивости необходимо увеличивать момент маятника посредством выполнения маятника в форме толстое тенного удлиненного цилинд ра.
Целью изобретения является повышение виброустсЛчивости преобразователя зенитного угла.
Указанная цель достигается тем, что в преобразователе зенитного угла, соде(жащем кортус, в котором установлены на опорах рамка с эксцентричным грузом и маятник, выполненные в виде поплавков уравновешенных по плавучести и дифференту, маятник расположен коаксиально рамке с эксцентричным грузом и соединен с ней упругой связью, причем эксцентричные грузы маятника и рамки расположены взаимно перпенцикуля рно.
Размещение маятника коаксиально рамке с эксцентричным грузом дает воз можность для увеличения виброустойчивости преобразователя зенитного угла посредством выполнения маятника в виде цилиндра вытянутой конструкции с больщим моментом ннерхии.
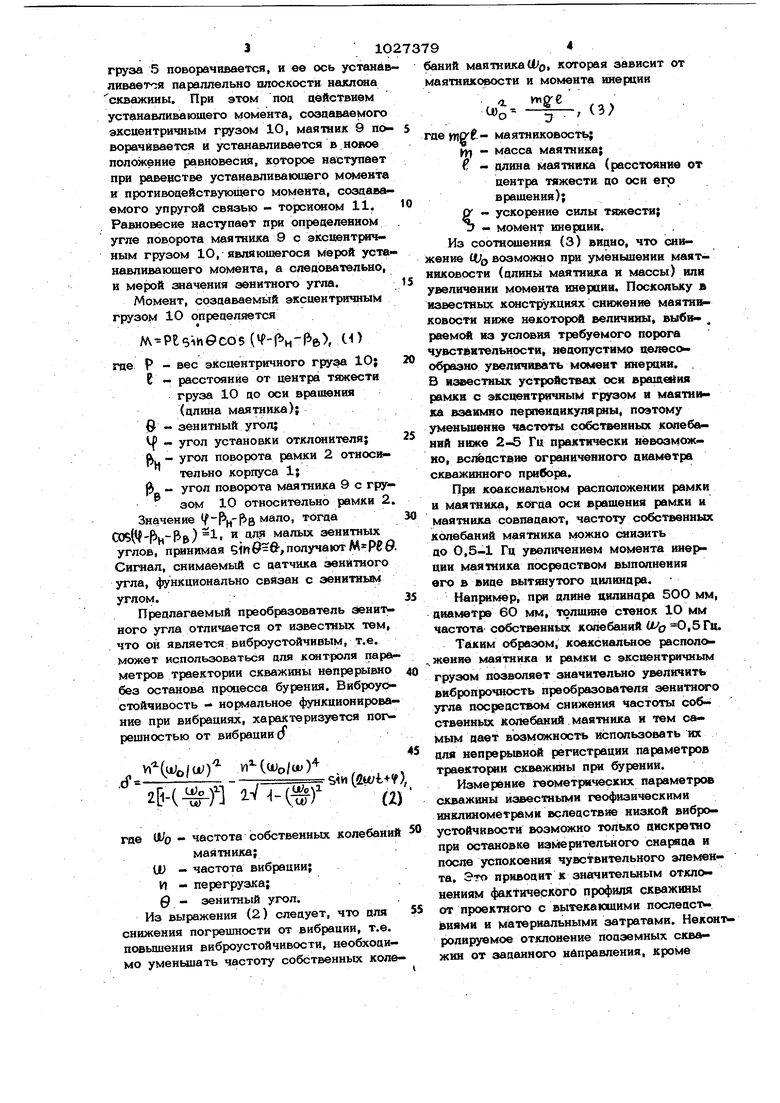
На фиг. 1 изображен преобразователь зенитного угла, продолы1ый разрез; на фиг. 2 - сечение А-А на фиг. 1, на фиг. 3 - сечение Б-Б на фиг. 1.
Преобразователь содержит корпус 1, заполненный вязкой жидкостью с большим удельным весом. Поплавковая рамка 2, и&нт{жруемая в корпусе 1 преобразователя опорами 3 и 4, выполнена в виде полого 1шлиндра, центр тяжести которого смещен относительно оси его вращения эксцентричным грузом 5. На оси вращения рамки 2 закреплены коллектор 6 и ротор 7 датчика визирюго угла. Статор 8 датчика визирного угла закреплен в корпусе 1 преобразователя. Маятник, вь1полнениый в виде цилиндра 9, центр которого смещен эксцентртчным грузом 1 расположен коаксиально рамке 2 и соединен с ней упругой связью - торсионом 11 На оси вращения маятника 9 закреплен ротор 12 датчика зенитного угла, а статор 13 установлен в рамке 2. Электрические провода элементов преобразователя соединены с герметичным штепсель-ным разъемом 14.
Преобразователь работает следующим образом.
П{Я1 отклонении скважины от вертикали рамка 2 под действием эксцентричного груза 5 поворачивается, и ее ось устана ливается параллельно плоскости скважины. При этом под аействием устанавливающего момента, созааваемого эксцентричным грузом 10, маятник 9 по ворачивается и устанавливается в.но1юе положение равновесия, которое наступает при равенстве устанавливакхцего момента и противодействующего момента, создаваемого упругой связью - торсионом 11. Равновесие наступает при определенном угле поворота маятника 9 с эксцентричным грузом Ю, являющегося мерой уста навливающего момента, а следовательно, и мерой значения зенитного угла. Момент, создаваемый эксцентричным грузом 10 определяется - .-. A Pleine e05( где Р - вес эксцентричного груза 10; С расстояние от центра тяжести груза 1О до оси вращения (длина маятника); 0 - зенитный угол; Ц - угол установки отклонителя; УО поворота рамки 2 относительно корпуса 1; j угол поворота маятника 9 с грузом 10 относительно рамки 2. Значение tf мало, тогда СК() 1. и для малых зенитных углов, принимая , получают Сигнал, снимаемый с датчика зенитного угла, функционально связан с зенитным углом. Предлагаемый преобразователь зенитного угла отличается от известных тем, что он является виброустойчиеым, т.е. может использоваться для контроля параметров траектории скважины непрерывно без останова процесса бурения. Виброуостойчивость - нормальное функционирование при вибрациях, характеризуется noi решностью от вибрации о ( ) . ,„ „ .сУ-... sin(2wt+V где - частота собственных колебаний маятника; Ш - частота вибрации; И - перегрузка; Q - зенитный угол. Из выражения (2) следует, что для снижения погрешности от вибрации, т.е. повьщ1ения виброустойчивости, необходимо уменьшать частоту собственных коле- баний маятника (fg, которая зависит от маятниксивости и момента ш{ерции о vwDC u)5- -|-, (з; где Ynfft - маята иковость; - масса маятника; - длина маятника (расстояние от центра тяжести до оси его вращения); -ускорение силы тяжести; -момент инерции.. Из соотнсшенйя (3) видно, что снижение возможно при уменьшении маятниковости (длины маятника и массы) или увеличении момента инерции. Поскольку в известных конструкциях снижение маятн ковости ниже некоторой величины, выбlli рвемсЛ из условия требуемого порога чувствительности, недопустимо целесообразно увеличивать момент инерции. . В и юстных устройствах оси врашшия рамкв с эксцентричным грузом и маятника взаимно пертендикуля|жы, поэтому уменьшение частоты собственных колебаний ниже 2-5 Гц практически невозможно, вследствие ограниченного диаметра скважинного прибора. При коаксиальном расположении рамки и маятника, когда оси вращения рамки и мая-тика совпадают, частоту собственных колебаний маятника можно сжизить до 0,5-1 Гц увеличением момента ине1 ции маятника посредством выполнения его в виде m iTsrayToro цилиндра. Например, при длине цилиндра 5ОО мм, диаметре 60 мм, толщине стенок 10 мм частота собственных колебаний 0,5Ги. Таким образом, коаксиальное располс жение маятника и рамки с эксцентричным грузом позволяет значительно увеличить виброирочность преобразователя зенитн(мго угла посредством снижения частоты соб ственньос Колебаний. маятника н тем самым дает возможность использовать их для непре( регистрации параметров траектории скважины при прении. Измерение Геометрических параметров скважины известными геофизическими иншишометрами вследствие низкой виброустойчивости возможно только дискретно при остановке нзьвернтельного снаряда и после успокоения чувствительного элемента. Это приводит к значительным отклонениям фактического профиля скважины от проектного с вытекающими последст виями и материальными затратами. Некон1 ролируемое отклонение подземных скважин от задсшного направления, кроме
уАвлнчения затрат, может привести к тя желым несчастным случаям иэ-за случайного всх|;| 1тия оругнх скважин. Нег. прерывный «оитроль геометрических параметров траектории скважины в процессе
бурения уменьшает перерывы бурения, вызванные метрологией ствооа скважины обычными ннклинометрическими приборами и позволяет получить значительный экономический эффект.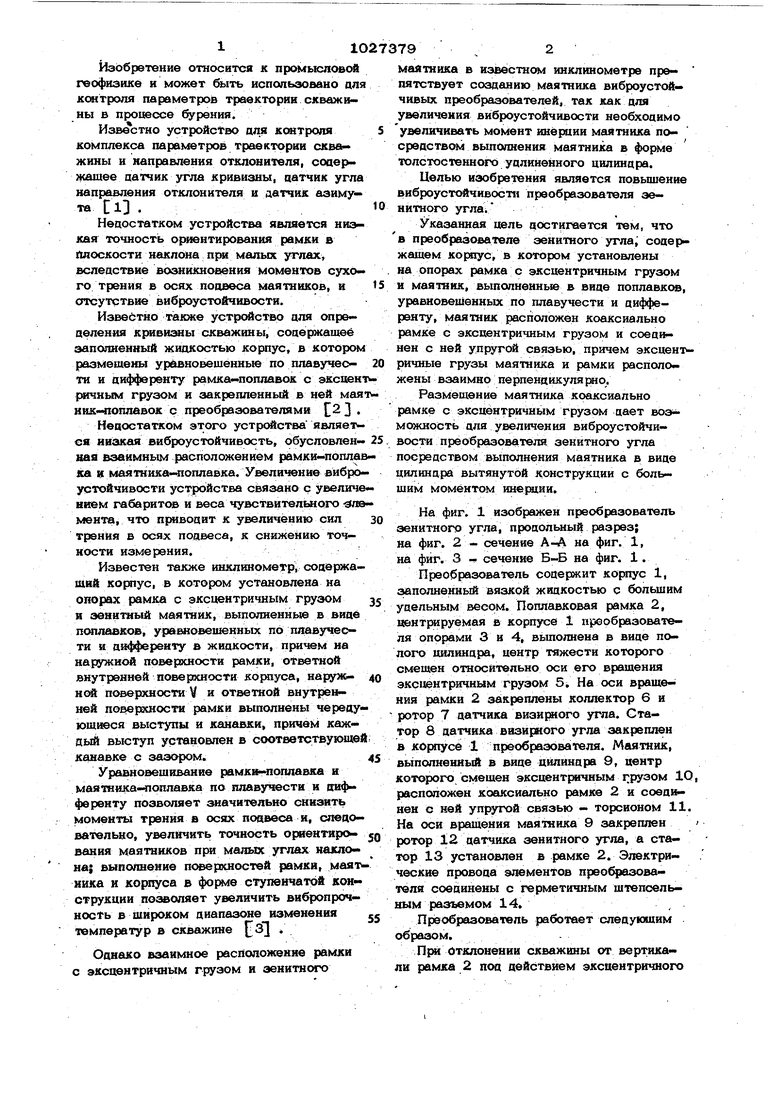
| название | год | авторы | номер документа |
|---|---|---|---|
| Виброустойчивый преобразователь зенитного угла | 1988 |
|
SU1537799A1 |
| Преобразователь зенитного угла | 1981 |
|
SU992734A1 |
| Преобразователь зенитного угла при измерении искривления скважины | 1980 |
|
SU933967A1 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| ИНКЛИНОМЕТР | 1998 |
|
RU2172828C2 |
| Преобразователь наклона скважины и поворота скважинного снаряда | 1983 |
|
SU1125364A1 |
| Устройство для определения зенитного и визирного угла в скважине | 1980 |
|
SU933968A1 |
| Инклинометр | 1977 |
|
SU648721A1 |
| ЗАБОЙНЫЙ ОРИЕНТАТОР | 1992 |
|
RU2049230C1 |
| ИНКЛИНОМЕТР (ВАРИАНТЫ) | 1998 |
|
RU2134427C1 |
ПРЕОБРАЗОВАТЕЛЬ ЗЕНИТНО.ГО УГЛА, соцержаший корпус, в котором установлены на опорах рамка с дксиент ричным грузом и маятник, выполненнью в вице поплавков, уравновешенных по плавучести и дифференту, о т л и ч а юш и и с я тем, что, с целью повьпиения виброустЫ(Чивости, маятик расположен коаксиально рамке с эксцентричным грузом и соединен с ней упругой связью, причем эксиентришые грузы маятника и рамки расположены взаимно-перпенцикулярно.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КОМПЛЕКСА ПАРАМЕТРОВ ТРАЕКТОРИИ СКВАЖИНЫ И НАПРАВЛЕНИЯ ОТКЛОНИТЕЛЯ | 0 |
|
SU285860A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| | и ,„,,,,.,, | |||
| .; -,- . | |||
