и размещен индуктивный преобразователь угла поворота с наружным и внутренним кольцами (К) 7 и 8. При этом М 3 выполнен в виде цилиндрического тела 1 с замкнутой цилиндрической по.-- - лостью 5, ось которой смещена относительно оси подвеса М 3. Полость 5 более, чем на половину своего объема заполнена жидкостью 6. На торцовой поверхности тела k закреплено К 7, а
К 8 жестко связано с Р 2. При отклонении от вертикали Р 2 устанавливается в плоскость наклона, а М 3 по линии горизонта и поворачивает К 7 на угол, равный зенитному. При этом К 8 остается неподвижным и с индуктивного преобразователя снимается сигнал рассогласования, пропорциональный величине зенитного угла. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь зенитного угла | 1982 |
|
SU1027379A1 |
| Виброустойчивый преобразователь зенитного угла | 1986 |
|
SU1430509A1 |
| Преобразователь зенитного угла при измерении искривления скважины | 1980 |
|
SU933967A1 |
| Преобразователь зенитного угла | 1981 |
|
SU992734A1 |
| Инклинометр | 1977 |
|
SU648721A1 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2112876C1 |
| Гироскопический маятник | 2020 |
|
RU2747913C1 |
| Устройство для определения зенитного и визирного угла в скважине | 1980 |
|
SU933968A1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
Изобретение относится к промысловой геофизике и предназначено для контроля параметров наклонно-направленных скважин в процессе бурения. цель - повышение виброустойчивости и точности измерений. В корпусе 1, заполненном вязкой жидкостью, установлена на опорах поплавковая рамка (Р) 2 с эксцентричным грузом. В Р 2 подвешен поплавковый маятник (М) 3 и размещен индуктивный преобразователь угла поворота с наружным и внутренним кольцами (К) 7 и 8. При этом М 3 выполнен в виде цилиндрического тела 4 с замкнутой цилиндрической полостью 5, ось которой смещена относительно оси подвеса М 3. Полость 5 более, чем наполовину своего объема заполнена жидкостью 6. На торцовой поверхности тела 4 закреплено К 7, а К 8 жестко связано с Р 2. При отклонении от вертикали Р 2 устанавливается в плоскость наклона, а М 3 - по линии горизонта и поворачивает К 7 на угол, равный зенитному. При этом К 8 остается неподвижным и с индуктивного преобразователя снимается сигнал рассогласования, пропорциональный величине зенитного угла. 2 ил.
Изобретение относится к промысловой геофизике и предназначено для контроля параметров наклонно-направленных скважин в процессе бурения.
Цель изобретения - повышение Ъиб- роустойчивости и точности измерений.
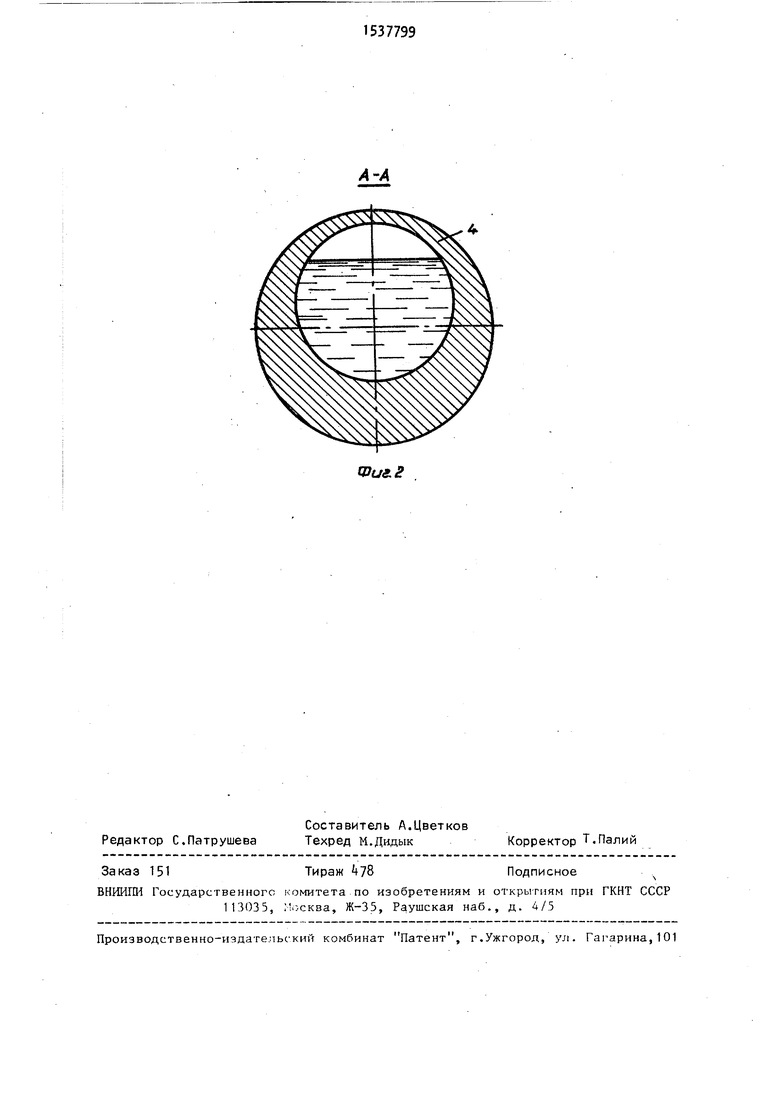
На фиг.1 приведен виброустойчивый преобразователь зенитного угла, продольный разрез; на фиг.2 - разрез А-А на фиг.1.
Виброустойчивый преобразователь зенитного угла содержит заполненный вязкой жидкостью корпус 1, в котором на опорах установлена поплавковая рамка 2 с эксцентричным грузом (не показан). В рамке 2 подвешен поплавковый маятник 3 в виде цилиндрического тела Ц, в котором выполнена замкнутая цилиндрическая полость 5, ось которой смещена относительно оси подвеса маятника 3. Полость 5 более чем наполовину1 своего объема заполнена жидкостью 6. В рамке 2 размещен индуктивный преобразователь угла поворота с наружным внутренним кольцом 7 и 8. Наружное кольцо 7 (ротор индуктивного преобразователя) закреплено на терцовой поверхности цилиндрического тела 4, а внутреннее кольцо.8 (статор этого преобразователя) жестко связано с рамкой 2. Съем сигнала и питание осуществляется через коллектор 9 и герметичный штепсельный разъем 10.
Преобразователь зенитного угла работает следующим образом.
В исходном положении, когда зенитный угол равен 0, с индуктивного преобразователя угла поворота снимается нулевой сигнал. При отклонении от . вертикали рамка 2 устанавливается в плоскости наклона. Маятник 3 под действием силы тяжести устанавливается по линии горизонта, поворачивая
0
5
0
5
0
5
0
5
тем самым связанный с ним ротор (кольцо 7) индуктивного преобразователя угла на угол, равный зенитному. При этом статор в виде кольца 8 остается неподвижным и с индуктивного преобразователя снимается сигнал рассогласования, пропорциональный величине зенитного угла.
Предлагаемый преобразователь зенитного угла может использоваться для измерения непосредственно в . процессе бурения скважины. Действительно, для работоспособности преобразователя в процессе бурения, сопровождающегося вибрациями определенного спектра частот, необходимо, чтобы частота собственных колебаний маятника 3 была в раз меньше нижней границы частотного спектра вибрации. При этом условии значения вибрационной погрешности не превышают предела допустимых, а точность измерения зенитного угла повышается.
Частота с00 собственных колебаний определяется выражением
(О,
где Р 1 - статический момент или
маятниковость;
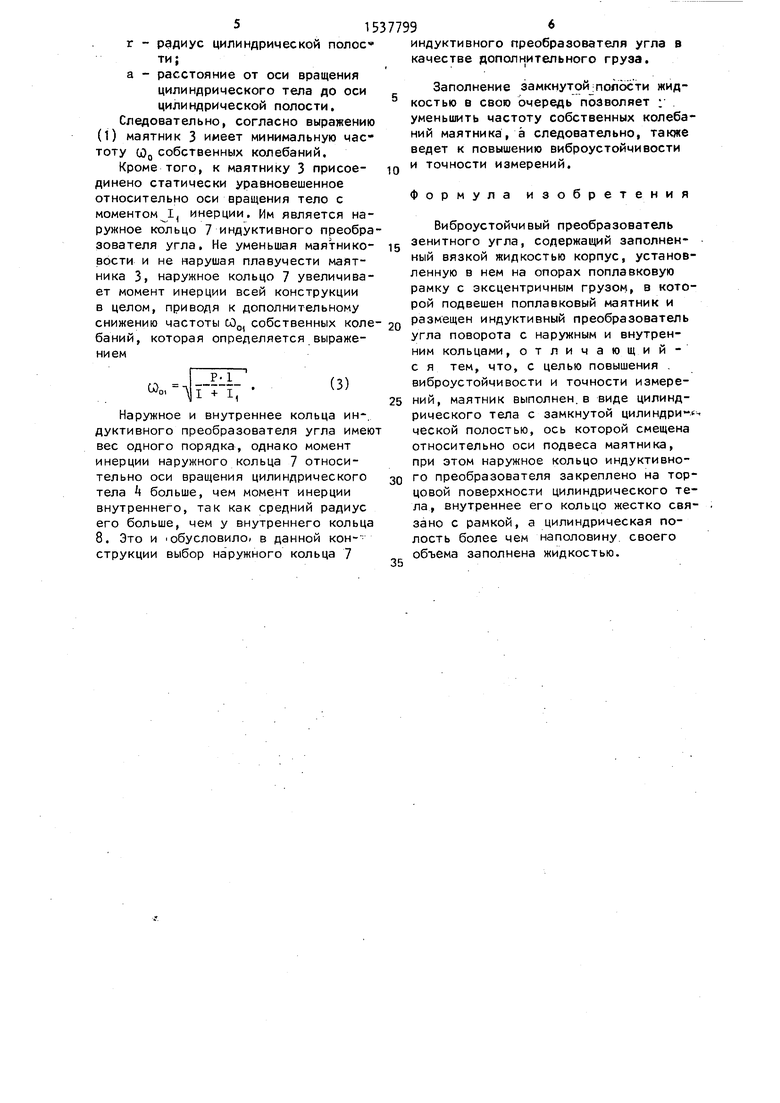
I - момент инерции маятника. Уменьшение частоты tOc собственных колебаний в виброустойчивом преобразователе зенитного угла достигнуто за счет выбора рациональной формы и конструкции маятника. При заданном весе и устанавливающем моменте, которые определяются внешними габаритами, маятник с приведенным на фиг.2 сечением имеет максимальный момент I инерции
TR«
+ а2 ), (2) где R - радиус цилиндрического тела;
I -|- -7 г2 (у
г - радиус цилиндрической полос
ти;
а - расстояние от оси вращения цилиндрического тела до оси цилиндрической полости. Следовательно, согласно выражению (1) маятник 3 имеет минимальную частоту QO собственных колебаний.
Кроме того, к маятнику 3 присоединено статически уравновешенное относительно оси вращения тело с моментом 1, инерции. Им является наружное кольцо 7 индуктивного преобразователя угла. Не уменьшая маятнико- вости и не нарушая плавучести маятника 3, наружное кольцо 7 увеличивает момент инерции всей конструкции в целом, приводя к дополнительному снижению частоты С001 собственных колебаний, которая определяется выражением
«о,
(3)
Наружное и внутреннее кольца индуктивного преобразователя угла имею вес одного порядка, однако момент инерции наружного кольца 7 относительно оси вращения цилиндрического тела 4 больше, чем момент инерции внутреннего, так как средний радиус его больше, чем у внутреннего кольца 8. Это и обусловило) в данной конструкции выбор наружного кольца 7
5
5
0
5
индуктивного преобразователя угла в качестве дополнительного груза.
Заполнение замкнутой полости жидкостью в свою очередь позволяет : уменьшить частоту собственных колебаний маятника, а следовательно, также ведет к повышению виброустойчивости и точности измерений.
Формула изобретения
Виброустойчивый преобразователь зенитного угла, содержащий заполненный вязкой жидкостью корпус, установленную в нем на опорах поплавковую рамку с эксцентричным грузом, в которой подвешен поплавковый маятник и размещен индуктивный преобразователь угла поворота с наружным и внутренним кольцами, отличающий- с я тем, что, с целью повышения виброустойчивости и точности измерений, маятник выполнен.в виде цилиндрического тела с замкнутой цилиндри- ческой полостью, ось которой смещена относительно оси подвеса маятника, при этом наружное кольцо индуктивного преобразователя закреплено на торцовой поверхности цилиндрического тела, внутреннее его кольцо жестко связано с рамкой, а цилиндрическая полость более чем наполовину своего объема заполнена жидкостью.
WuzS
