Изобретение относится к гелиоэнергетике и может быть использовано для управления движением гелиостатов, предназначенных для солнечных печей.
Известна система автоматического управления движением гелиостатов, содержащая установленные перед каждым гелиостатом и оптически связанные с ним точные двухкоординатные датчики, выходы которых подсоединены к блокам переключения, связанным с приводами осей гелиостатов, и установленный по меньшей мере перед одним гелиостатом и оптически связанный с ним поисковый двухкоординатный датчик, выходы которого подсоединены к блоку переключения этого гелиостата 1.
Недостатком этой системы является большое количество поисковых солнечных датчиков, устанавливаемых перед каждым гелиостатом. Поисковые солнечные датчики представляют собой сложную оптическую систему, что снижает надежность системы в целом, ухудшает ее эксплуатационные свойства, так как датчики требуют проведения частных юстировочных и профилактических работ. Они являются дорогостоящими средствами и обладают невысокой надежностью.
Наличие поискового датчика каждого гелиостата исключает синхронную работу всех гелиостатов, в результате чего также усложняется эксплуатация и снижается надежность системы.
Цель изобретения - упрощение эксплуатации и повышение надежности путем синхронизации наведения гелиостатов на Солнце.
Поставленная цель достигается тем, что в системе автоматического управления движением гелиостатов, содержащей установvieHHbie перед каждым гелиостатом и оптически связанные с ним точные двухкоординатные датчики, выходы которых подсоединены к блокам переключения, связанным с приводами осей гелиостатов, и устаовленный по меньшей мере перед одним гелиостатом и оптически связанный с ним поисковый двухкоординатный датчик, выходы которого подсоединены к блоку переключения этого гелиостата, гелиостат, имеющий поисковый двухкоординатный датчик, снабжен датчиками углового положения осей гелиостата, а остальные гелиостаты снабжены приемниками углового положения, связанными с датчиками углового положения и подсоединенными через соответствующий блок переключения к приводам осей гелиостатов, а точные и поисковый двухкоординатные датчики выполнены с дополнительным выходом, подсоединенным к соответствующему блоку переключения для перевода управления движением гелиостатов с режима грубого слежения на режим точного слежения.
На чертеже показана система автоматического управления движением гелиостатов, условно показано три гелиостата.
Система содержит установленные перед каждым гелиостатом 1, 2 и 3 и оптически связанные с ним точные двудкоординатные датчики 4, 5 и 6, выходы 7-12 которых подсоединены к блокам 13-15 переключения, связанным с приводами 16-21 осей гелиостатов 1, 2 и 3, и установленный перед гелиостатом 1 и оптически связанный с ним поисковый двухкоординатный датчик 22, выходы 23 и 24 которого подсоединены к блоку
13 переключения этого гелиостата 1.
Гелиостат 1 снабжен датчиками 25 и 26 углового положения осей гелиостата 1, а остальные гелиостаты 2 и 3 снабжены приемниками 27-30 углового положения, связанными с датчика иИ125 k 26 углового положения и подсоединенными через соответствующий блок 14 и 15 к приводам 18, 19 и 20 и 21 осей гелиостатов 2 и 3, а точные и поисковый датчики 4, 5, 6 и 22 выполнены с дополнительным выходом 31-34, подключенным к соответствующему блоку 13, 14 и 15 переключения для перевода управления движением гелиостатов с режима грубого слежения на режим точного слежения.
Блок 13 переключения имеет логический элемент И 35, усилитель 36, реле 37 с кон5 тактами 38-41.
Блок 14 переключения имеет реле 42 с контактами 43-46, а блок 15 - реле 47 с контактами 48-51.
Гелиостаты 1-3 отражают солнечные лучи на концентратор 52.
0 Работает система следующим образом.
Гелиостат 1 осуществляет отражение солнечных лучей на поисковый датчик 22, имеющий большое поле зрения. При помощи приводов 16 и 17 по азимуту и углу места осей гелиостата 1, управляемых сигналами с
5 поискового датчика 22 через размыкающие контакты 38 и 40 реле 37 блока 13 переключе ния, обеспечивается движение гелиостата 1 из исходного состояния в рабочее, когда отраженный от зеркала гелиостата 1 луч попадает в поле зрения точного датчика 4 с малым углом зрения.
Установленные на гелиостате 1 и механически связанные с его осями датчики 25 и 26 углового положения 10 и 11 по азимуту и углу места вырабатывают сигналы, пропор5 циональные углам поворота гелиостата 1, которые поступают на приемники 27-30 углового положения, установленные на гелиостатах 2, 3 и механически связанные с их осями.
Сигналы с приемников 27-30 через размыкающие контакты 43, 45, 48 и 50 реле 42, 47 блоков 14 и 15 переключения поступают на приводы 18-21 гелиостатов 2 и 3, обеспечивая их движение к рабочему состоянию, при котором отппраженные от зеркал гелиостатов 2 и 3 лучи попадают в поле зрения
5 точных датчиков 5 и 6.
При попадании отраженного от зеркала гелиостата 1 луча в поле зрения точного датчика 4 сигнал с его выхода 31 попадает на логический элемент И 35 блока 13 переключения одновременно на этот элемент поступает сигнал с выхода 34 поискового датчика 22. При наличии двух сигналов с выхода элемента 11 через усилитель 36 поступает сигнал на реле 37, при срабатывании которого размыкаются его контакты 38 и 40, отключая от приводов 16 и 17 поисковый датчик 22, и замыкаются контакты 39 и 31, подключая к приводам 16 и 17 точный двухкоординатный датчик 4. При попадании отраженных от зеркал гелиостатов 2 и 3 лучей в поле зрения точных датчиков 5 и 6 сигналы с их выходов 32 и 33 поступают на реле 42 и 47 блоков 14 и 15 переключения. При срабатывании реле 42 и 47 размыкаются их контакты 43, 45, 48 и 50, отключая от приводов 18-21 приемники 27-30 углового положения, и замыкаются контакты 44, 46, 49 и 51, подключая к приводам 18-21 точные двухкоординатные датчики 5 и 6. В дальнейшем слежение всех гелиостатов за Солнцем происходит по сигналам точных датчиков. В данной системе автоматического управления движением гелиостатов упрощается обслуживание системы, повышается ее надежность за счет синхронизации движения гелиостатов и значительно уменьшается стоимость системы за счет применения вместо дорогостоящих поисковых оптических датчиков датчиков углового положения гелиостата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гелиостатом | 1983 |
|
SU1147901A1 |
| Система управления гелиостатом | 1985 |
|
SU1305505A2 |
| Система автоматического управления солнечной печью | 1978 |
|
SU775541A1 |
| Устройство для управления солнечнойТЕплОВОй уСТАНОВКОй | 1979 |
|
SU836624A1 |
| Устройство для юстирования фацет гелиостата | 1981 |
|
SU992943A1 |
| Система управления гелиостатом | 1983 |
|
SU1155993A1 |
| Система управления гелиостатом | 1990 |
|
SU1784100A3 |
| Система управления солнечной установкой | 1979 |
|
SU868698A1 |
| Автоматическая система управ-лЕНия гЕлиОСТАТОМ | 1979 |
|
SU800516A1 |
| Устройство управления гелиостатом | 1983 |
|
SU1291925A1 |
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГЕЛИОСТАТОВ, содержащая установленные перед каждым гелиостатом и оптически связанные с ним точные двухкоординатные датчики, выходы которых подсоединены к блокам переключения, связанным с приводами осей гелиостатов, и установленный по меньшей мере перед одним гелиостатом, и оптически связанный с ним поисковый двухкоординатный датчик, выходы которого подсоединены к переключения этого гелиостата, отличающаяся тем, что, с целью упрощения эксплуатации и повышения надежности путем обеспечения сихронизации наведения гелиостатов на Солнце, гелиостат, имеющий поисковый двухкоординатный датчик, снабжен датчиками углового положения осей гелиостата, а остальные гелиостаты снабжены приемниками углового положения, связанными с датчиками углового положения и подсоединенными через соответствующий блок переключения к приводам осей гелиостатов, а точные и поисковый двухкоординатные датчики выполнены с дополнительным выходом, подсоединенным к соответствующему блоку переключения для перевода управлеi ния движением гелиостатов с режима грубо(Л го слежения на режим точного слежения. Ю 00 со 05 ел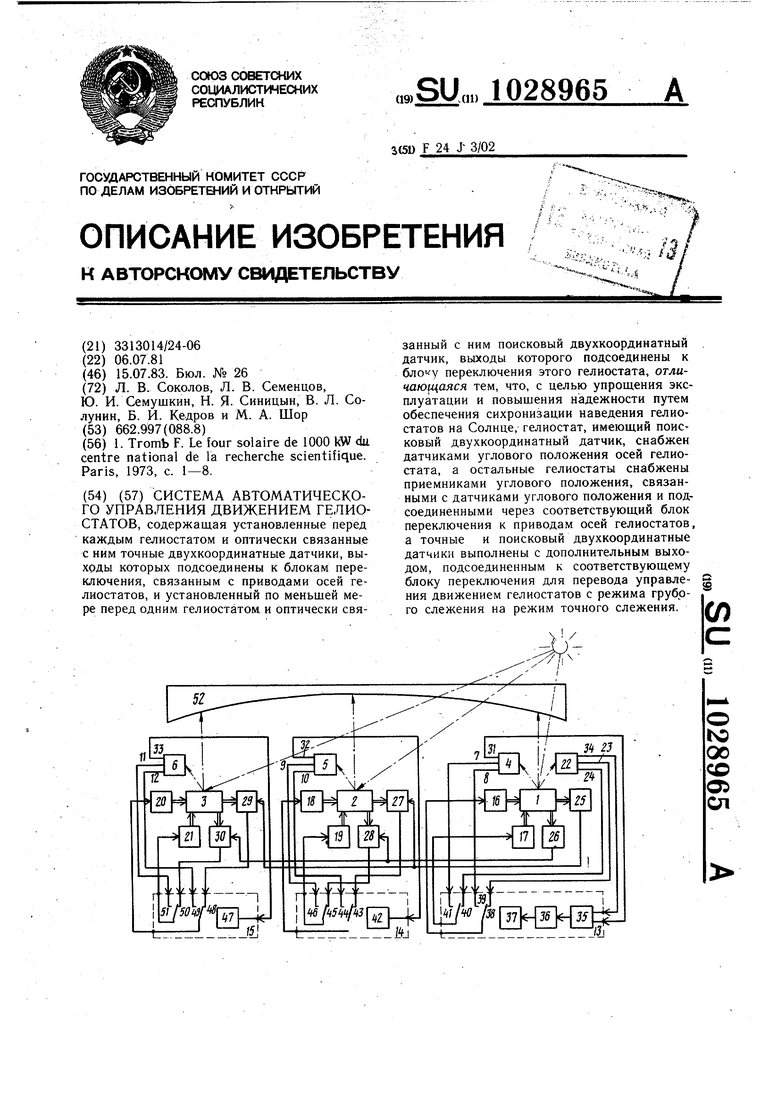
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Tromb F | |||
| УСТРОЙСТВО ДЛЯ ИЗБИРАТЕЛЬНОГО ВЫЗОВА ТЕЛЕФОННЫХ АППАРАТОВ | 1922 |
|
SU1000A1 |
| Paris, 1973, c | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
