Изобретение относится к гелиотехнике, в частности к системам управления гелиостатом и является усовер- шенствованием изобретения по авт.св. № 1147901.
Цель изобретения - упрощение эксплуатации системы и автоматизации управления путем предотвращения вмешательства оператора при наличии кратковременной облачности.
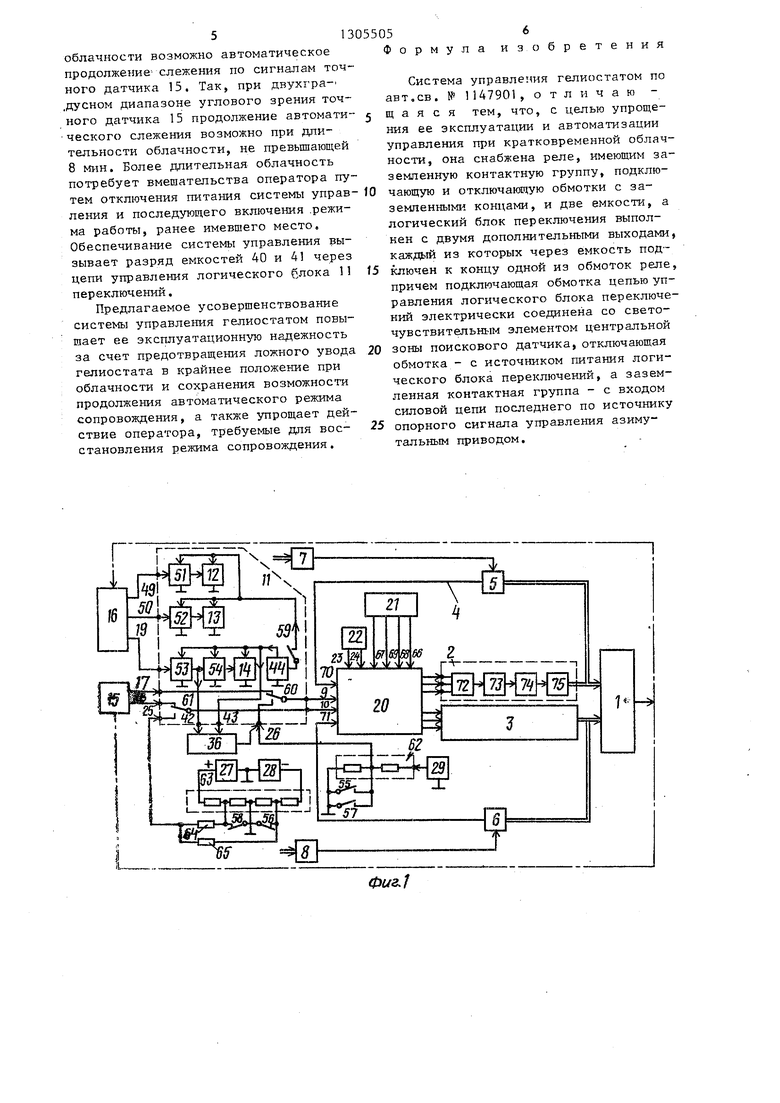
На фиг. 1 показана функциональная схема системы управления гелиостатом; на фиг. 2 - угол зрения поискового датчика гелиостата в азимуте и его углы захвата в зените в периферийных и центральной зонах; на фиг. 3 - функциональная схема поискового датчика гелиостата; на фиг. 4 - схема предотвращения увода гелиостата в крайнее положение при облачности.
Система управления гелиостатом 1 (фиг. 1) содержит азимутальный и зе- нитальный приводы 2 и 3 соответственно, соединенные электрическими цепями 4 с датчиками.5 и 6 и задатчиками 7 и 8 угловых положений гелиостата 1 и выходами 9 и 10 силовых цепей логического блока 11 переключений, выполненного на основе релейных элементов 12 - 14 и имеющего цепи управления, точный 15 и поисковый 16 датчики слежения расположенные в отраженном гелиостатом 1 потоке излучения и электрически соединенные с логическим блоком 11 переключений, причем точный . датчик 15 подключен к входам 17 и 18 его силовых цепей, а поисковый датчик 16 дополнительным выходом 19 подключен к цепи управления последним для перевода управления гелиостатом 1 с режима грубого -слежения на режим точного слежения.
Система управления снабжена электрически соединенным с приводами 2 и 3 с образованием электрических цепей 4 блоком 20 коммутации режимов работы, имеющим задатчик 21 режима, программным блоком 22 разориентации, подключенным к дополнительным входам 23 и 24 блока 20 коммутации режимов, и электрически соединенными с остальными входами 25 и 26 силовых цепей логического блока 11 переключений противофазными источниками 27 и 28 опорных сигналов управления зениталь- ным приводом 3 и источником 29 опорного сигнала управления восточной ориентацией азимутального привода 2,
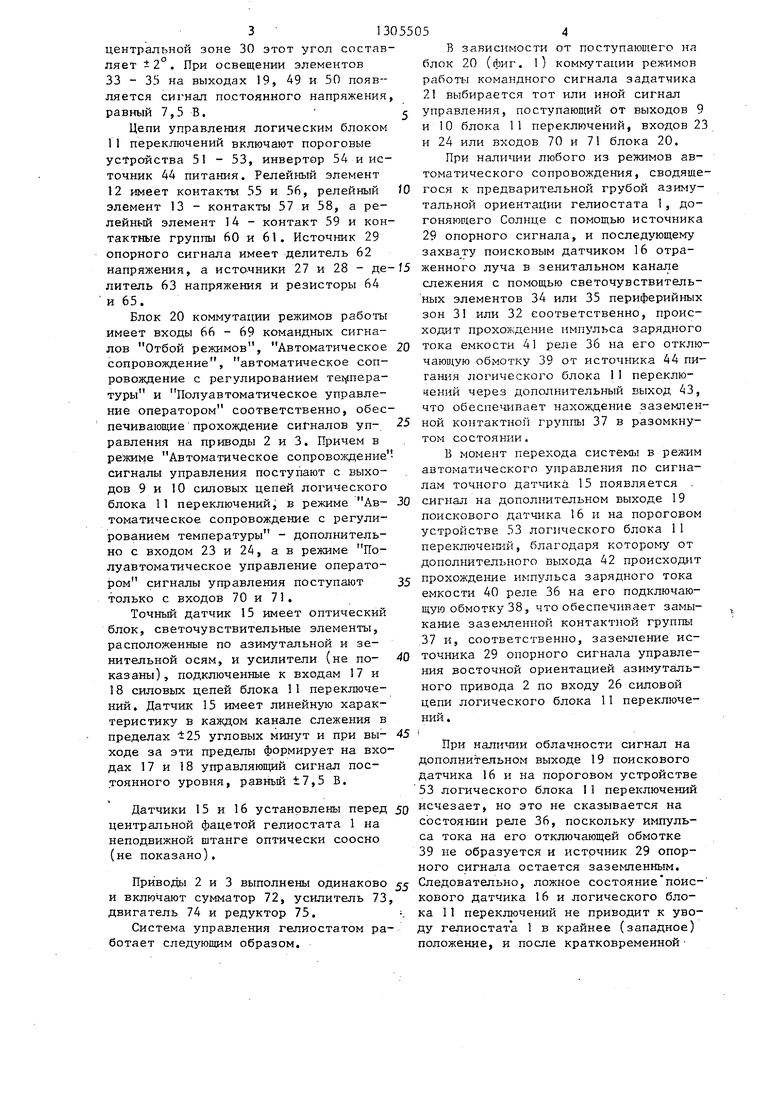
а поисковый датчик 16 выполнен одно- осным с каналом зенитального слеж-а- ния, имеющим центральную зону 30 (фиг. 2) и периферийные зоны 31 и 32. Причем светочувствительный элемент 33 (фиг. 3) центральной зоны 30 электрически соединен с дополнительным выходом 19 (фиг. З), а светочувствительные элементы 34 и 35 периферийных зон 31 и 32 (фиг. 2) - с цепями управления логическим блоком 1I (фиг. 1) переключений с возможностью подсоединения источника 29 опорного сигнала управления азимутальным при5 водом 2 при отсутствии сигнала со светочувствительных элементов 34 и 35 (фиг. З) и подсоединения соответствующего противофазного источника 27 или 28 (фиг. 1) опорного сигнала уп0 равления зенитальным приводом 3 при сигнале одного из светочувствительных элементов 34 или 35 (фиг. З), а угол поискового датчика 16 (фиг, 1 и 2) в азимуте и угол захва5 та в центральной зоне 30 выбраны меньше углов захвата двухосновного точного датчика 15 (фиг.1)
Система управления гелиостатом 0 также снабжена реле 36 (фиг. 4), имеющим заземленную контактную группу 37, подключающую 38 и отключающую 39 обмотки с заземленными концами и две емкости 40 и 41, а логический блок I 1 переключения выполнен с двумя дополнительными выходами 42 и 43, каждый из которых через соответствующую емкость 40 или 41 подключен к концу одной из обмоток 38 или 39 реле 36, Q Причем подключающая обмотка 38 цепью управления логического блока 11 пере- ключений электрически соединена со светочувствительным элементом 33 центральной зоны 30 поискового дат- г чика 16, отключающая обмотка 39 - с источником 44 питания логического блока 11 переключений, а заземленная контактная группа 37 :- входом 26 силовой цепи последнего по источнику 29 опорного сигнала управления азимутальным приводом 2
Поисковый датчик 16 имеет оптический блок 45 и усилители 46 - 48. Его выхода 49 и 50 подключены к цепям управления логическим блоком 11 переключений. Угол зрения поискового дат- составляет ±2°
в канале зе- причем в
5
0
5
чика 16 в азимуте (фиг.2), а угол
ахвата нитального слежения ±35 ,
центральной зоне 30 этот угол составляет i 2°, При освещении элементов 33 - 35 на выходах 19, 49 и 50 появ-- ляется сигнал постоянного напряжения, равный 7,5В.
Цепи управления логическим блоком
11переключений включают пороговые устройства 51 - 53, инвертор 54 и источник 44 питания. Релейный элемент
12имеет контакты 55 и 56, релейный элемент 13 - контакты 57 и 58, а ре- лейньй элемент 14 - контакт 59 и контактные группы 60 и 61. Источник 29
При наличии любого из режимов автоматического сопровождения, сводящегося к предварительной грубой азимутальной ориентации гелиостата 1, до- гоняюо1его Солнце с помощью источника 29 опорного сигнала, и последующему захвату поисковым датчиком 16 отраопорного сигнала имеет делитель 62 напряжения, а источники 27 и 28 - де-f5 женного луча в зенитальном канале литель 63 напряжения и резисторы 64 слежения с помощью светочувствитель- и 65.
Блок 20 коммутации режимов работы имеет входы 66 - 69 командных сигнаных элементов 34 или 35 периферийных зон 31 или 32 соответственно, происходит прохождение импульса зарядного
лов Отбой режимов, Автоматическое 20 тока емкости 41 реле 36 на его отклюсопровождение , автоматическое сопровождение с регулированием Tei nepa- туры и Полуавтоматическое управление оператором соответственно, обеспечивающие прохождение сигналов уп- 25 равления на приводы 2 и 3. Причем в режиме Автоматическое сопровождение сигналы управления поступают с выходов 9 и 10 силовых цепей логического
чающую обмотку 39 от источника 44 п гания логического блока 11 переключений через дополнительный выход 43 что обеспечивает нахож,цение заземле ной контактной группы 37 в разомкну том состоянии.
В момент перехода системы в режи автоматического управления по сигна лам точного датчика 15 появляется
блока 11 переключений, в режиме 30 сигнал на дополнительном выходе 19
поискового датчика 16 и на порогово устройстве 53 логического блока 11 переключе1-кй, благодаря которому от дополнительного выхода 42 происходи прохождение импульса зарядного тока емкости 40 реле 36 на его подключаю щую обмотку 38, что обеспечивает замы кание заземленной контактной группы 37 и, соответственно, заземление ис точника 29 опорного сигнала управле ния восточной ориентацией азимуталь ного привода 2 по входу 26 силовой цепи логического блока 11 переключе ний.
тематическое сопровождение с регулированием температуры - дополнительно с входом 23 и 24, а в режиме Полуавтоматическое управление оператором сигналы управления поступают 35 только с входов 70 и 71,
Точный датчик 15 имеет оптический блок, светочувствительные элементы, расположенные по азимутальной и зе- нительной осям, и усилители (не по- 40 казаны), подключенные к входам 17 и 18 силовых цепей блока 11 переключений. Датчик 15 имеет линейную характеристику в каждом канале слежения в пределах 125 угловых минут и при вы- 45 ходе за эти пределы формирует на входах 17 и 18 управляющий сигнал постоянного уровня, равный ±7,5 В.
поискового датчика 16 и на пороговом устройстве 53 логического блока 11 переключе1-кй, благодаря которому от дополнительного выхода 42 происходит прохождение импульса зарядного тока емкости 40 реле 36 на его подключающую обмотку 38, что обеспечивает замыкание заземленной контактной группы 37 и, соответственно, заземление источника 29 опорного сигнала управления восточной ориентацией азимутального привода 2 по входу 26 силовой цепи логического блока 11 переключений.
При наличии облачности сигнал на дополнительном выходе 19 поискового датчика 16 и на пороговом устройстве 53 логического блока 11 переключений Датчики 15 и 16 установлены перед 50 исчезает, но это не сказывается на центральной фацетой гелиостата 1 на состоянии реле 36, поскольку импуль- неподвижной штанге оптически соосно са тока на его отключающей обмотке (не показано).39 не образуется и источник 29 опорного сигнала остается заземленным.
Приводы 2 и 3 выполнены одинаково 55 Следовательно, ложное состояние поис- и включают сумматор 72, усилитель 73, кового датчика 16 и логического бло- двигатель 74 и редуктор 75. ;. ка 11 переключений не приводит к увоСистема управления гелиостатом ра- ду гелиостат а 1 в крайнее (западное) ботает следующим образом.положение, и после кратковременной
В зависимости от поступаюиего на блок 20 (фиг. 1) коммутации режимов работы командного сигнала задатчика 21 выбирается тот или иной сигнал управления, поступающий от выходов 9 и 10 блока 11 переключений, входов 23 и 24 или входов 70 и 71 блока 20.
При наличии любого из режимов автоматического сопровождения, сводящегося к предварительной грубой азимутальной ориентации гелиостата 1, до- гоняюо1его Солнце с помощью источника 29 опорного сигнала, и последующему захвату поисковым датчиком 16 отраженного луча в зенитальном канале слежения с помощью светочувствитель-
женного луча в зенитальном канале слежения с помощью светочувствитель-
ных элементов 34 или 35 периферийных зон 31 или 32 соответственно, происходит прохождение импульса зарядного
чающую обмотку 39 от источника 44 пи- гания логического блока 11 переключений через дополнительный выход 43, что обеспечивает нахож,цение заземленной контактной группы 37 в разомкнутом состоянии.
В момент перехода системы в режим автоматического управления по сигналам точного датчика 15 появляется ,
сигнал на дополнительном выходе 19
поискового датчика 16 и на пороговом устройстве 53 логического блока 11 переключе1-кй, благодаря которому от дополнительного выхода 42 происходит прохождение импульса зарядного тока емкости 40 реле 36 на его подключающую обмотку 38, что обеспечивает замыкание заземленной контактной группы 37 и, соответственно, заземление источника 29 опорного сигнала управления восточной ориентацией азимутального привода 2 по входу 26 силовой цепи логического блока 11 переключений.
1305505
облачности возможно автоматическое продолжение-слежения по сигналам точного датчика 15. Так, при двухгра- .дусном диапазоне углового зрения точ- ного датчика 15 продолжение автомати- ческого слежения возможно при длительности облачности, не превьппающей 8 мин. Более длительная облачность потребует вмешательства оператора пуФормула изобретения
Система управления гелиостатом по автосв. № 1147901, отличаю - щ а я с я тем, что, с целью упрощения ее эксплуатации и автоматизации управления при кратковременной облачности, она снабжена реле, имеющим запотребует вмешател ьи... и...... -. земленную контактную группу, подклю- тем отключения питания системы управ- 10 чающую и отключающую « мотки с з ления и последующего включения .режи- земленными концами, и две емкости, а мПаботЫ ранее имевшего место. логический блок переключения выпол- ОбеспечГваГе системь: управления вы- нен с двумя дополнительньтми выходами, зывает разряд емкостей 40 и 41 через каждой из которых через емкость подзывает разряд е ключен к концу одной из обмоток реле,
причем подключающая обмотка цепью управления логического блока переключений электрически соединена со светочувствительным элементом центральной
цепи управления логического блока 11 переключений.
Предлагаемое усовершенствование системы управления гелиостатом повы- щает ее эксплуатационную надежность
Га-: ..о. .0 :-- -i:s-:: : гелиостата в крайнее положение при облачности и сохранения возможности продолжения автоматического режима сопровождения, а также упрощает дей ствие оператора, требуемые для восстановления режима сопровождения.
обмотка - с источником питания логического блока переключений, а заземленная контактная группа - с входом силовой цепи последнего по источнику 25 опорного сигнала управления азимутальным приводом. Формула изобретения
0 :-- -i:s-:: : обмотка - с источником питания логического блока переключений, а заземленная контактная группа - с входом силовой цепи последнего по источнику 25 опорного сигнала управления азимутальным приводом. 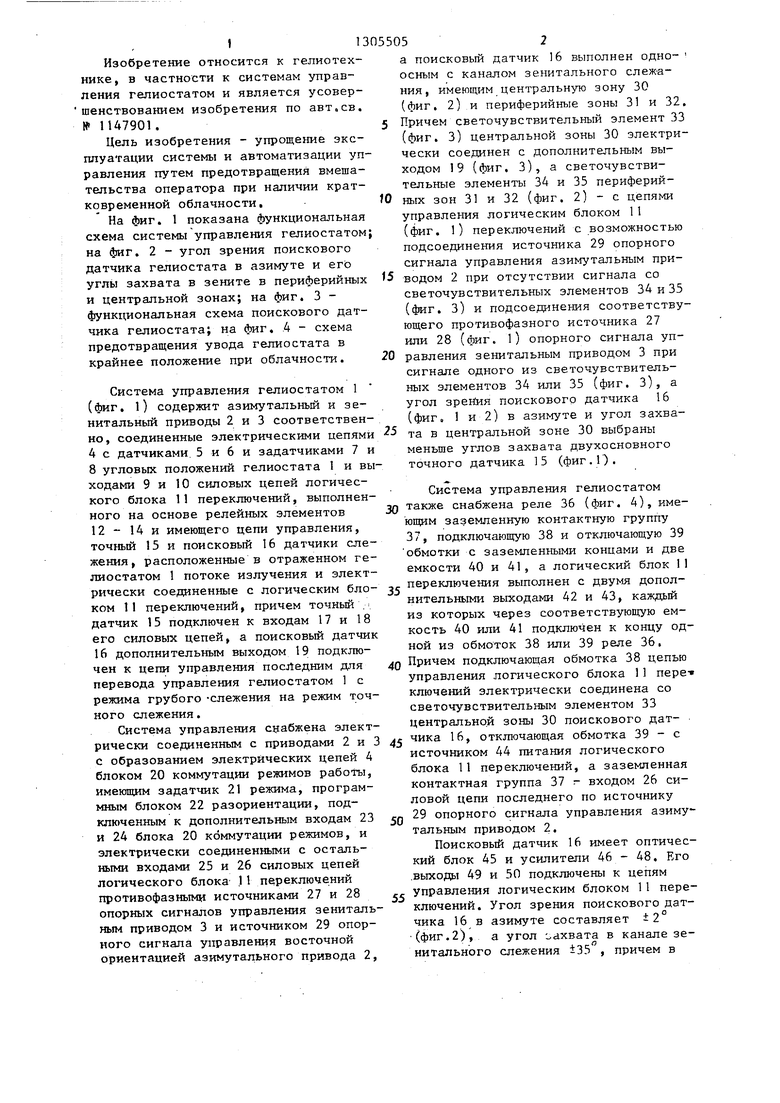
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гелиостатом | 1983 |
|
SU1147901A1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ И СЛЕЖЕНИЯ ЗА СОЛНЦЕМ КОНЦЕНТРАТОРНОЙ ФОТОЭНЕРГОУСТАНОВКИ | 2014 |
|
RU2579169C1 |
| Гелиокомплекс | 1983 |
|
SU1147900A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПЛАТФОРМОЙ КОНЦЕНТРАТОРНЫХ СОЛНЕЧНЫХ МОДУЛЕЙ | 2015 |
|
RU2611571C1 |
| Устройство управления электродвигателями | 1981 |
|
SU1081621A1 |
| Система автоматического управления движением гелиостатов | 1981 |
|
SU1028965A1 |
| ПОВОРОТНОЕ УСТРОЙСТВО ДЛЯ СОЛНЕЧНОГО ЭНЕРГОМОДУЛЯ | 2007 |
|
RU2381426C2 |
| Автоматическая система управления гелиостатом | 1985 |
|
SU1322036A1 |
| Гелиокомплекс | 1983 |
|
SU1141274A1 |
| СОЛНЕЧНАЯ БАШЕННАЯ ЭЛЕКТРОСТАНЦИЯ | 2018 |
|
RU2709007C1 |
Изобретение относится к гелиотехнике и позволяет упростить эксплуатацию системы и автоматизировать управление путем предотвра1це1шя вмешательства оператора при наличии кратковременной облачности. Репе 36 имеет заземпенную контактную группу (ЗКГ) 37 и две емкости 40 и 41. ЗКГ 37 подключает и отключает обмотки 38 и 39 с заземленными концами. Логичес 2 0 4 74 кий блок переключения (ЛБП) выполнен с двумя дополнительными выходами 42 и 43. Каждый выход 42 и 43 подключен к концу одной из обмоток 38 или 39 реле 36. Подключающая обмотка 38 цепью управления ЛБП электрически соединена со светочувствительным элементом центральной зоны поискового датчика, отключающая обмотка 39 - с источником питания ЛБП, а ЗКГ 37 - с входом силовой цепи последнего по источнику опорного сигнала управления азимутальным, приводом. В результате повьш1ается эксплуатационная надежность системы за счет предотвращения ложного увода гелиостата в крайнее положение при облачности и сохранения, возможности продолжения автоматического режима сопровождения. Кроме того, упрощаются действия оператора, требуемые для восстановления режима сопровождения. 4 ил. с (Л J / 74 дб СО о ел СП о ел 39 г 26 14) ФигМ
i
Фиг.1
Фиг. 2
Редактор 0. Вугир
Составитель Н. Шендерович
Техред В.КадарКорректор Л.Патай
Заказ 1418/38 Тираж 660Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская йаб,, д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Фиг.З
| Система управления гелиостатом | 1983 |
|
SU1147901A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
