Изобретение относится к гелиотехнике, в частности к системам управления гелиостатами.
Известна I систем а управления гелиостатами, содержащая азимутальный и зенитальный приводы, соединенные электрическими цепями с датчиками и задатчиками угловых положений гелиостата и выходами силовых цепей логического блока переключений, выполненного на основе релейных элементав и имеющего цепи управления, а также точный и поисковый датчики слежения, расположенные в отраженном гелиостатом потоке излучения и электрически соединенные с логическим блоком переключений, причем точный датчик подключен к входам силовых цепей, а поисковый - дополнительным выходом подключен к цепи управления последним для перевода управления гелиостатом с режима грубого слежения на режим точного слежения. Эта система управления предназначена для автоматического слежения гелиостатом за положением Солнца и имеет в своем составе двухосный поисковый датчик слежения, управляющий азимутальным и зенитальным приводами- 1. Цель изобретения - расщирение функциональных возможностей системы и упрощения конструкции поискового датчика. Поставленная цель достигается тем, что система управления гелиостатом, содержащая азимутальный и зенитальный приводы, соединеннь|е электрическими цепями с датчиками и задатчиками угловых положений гелиостата и выходами силовых цепей логического блока переключений, выполненного на основе релейных элементов и имеющего цепи управления, а также точный и поисковый датчики слежения, расположенные в отраженном гелиостатном потоке излучения и электрически соединенные с логическим блоком переключений, причем точный датчик подключен к входам силовых цепей, а поисковый - дополнительным выходом подключен к цепи управления логическим блоком переключения для перевода управления гелиостатом с режима грубого слежения на режим точного слежения, снабжена электрически соединенным с приводом с образованием электрических цепей блоком коммутации режимов работы, имеющим задатчик режима, программным блоком разориентации, подключенным к дополнительным входам блока коммутации режимов работы, и электрически соединенными с остальными входами силовых цепей логического блока переключений противофазными источниками опорных сигналов управления зенитальным приводом и источником опорного сигнала управления восточной ориентацией азимутального привода, а поисковый датчик выполнен одноосным с каналом зенитального слежения, имеющим центральную и периферийные зоны, причем светочувствительный элемент центральной
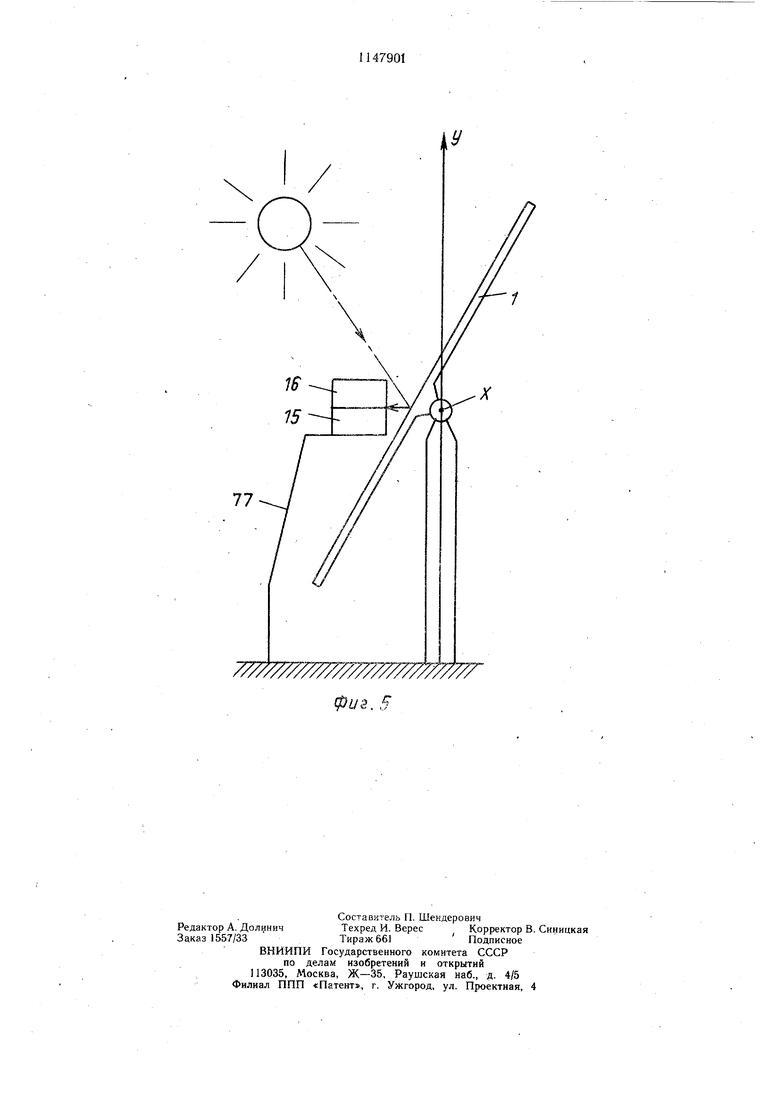
зоны электрически соединен с дополнительным выходом, а светочувствительные элементы периферийных зон - с цепями управления логическим блоком переключений и возможностью подсоединения источника опорного сигнала управления азимутальным приводом при отсутствии сигнала со светочувствительных элементов и для подсоединения соответствующего противофазного источника опорного сигнала управления зенитальным приводом при сигнале с одного из светочувствительных элементов, а угол зрения поискового датчика в азимуте и угол захвата в центральной зоне выбраны меньще углов захвата двухосного точного датчика. На фиг. 1 показана функциональная схема системы управления гелиостатом; на фиг. 2 - угол зрения поискового датчика в азимуте и углы захвата в периферийных и центральных зонах канала зенитального слежения; на фиг. 3 - функциональная схема поискового датчика системы; на фиг. 4 - функциональная схема блока ком(утации режимов работы системы; на фиг. 5 - расположение точного и поискового датчика системы в отраженном гелиостатом потоке излучения. Система управления гелиостатом 1 (фиг. 1) содержит азимутальный и зенитальный приводы 2 и 3 соответственно, соединенные электрическими цепями 4 с датчиками 5, 6 и задатчиками 7 и 8 угловых положений гелиостата 1 и выходами 9, 10 силовых цепей логического блока 11 переключений, выполненного на основе релейных элементов 12, 13, 14 и имеющего цепи управления, а также точный и поисковый датчики 15 и 16 слежения, расположенные в отраженном гелиостатом 1 потоке излучения и электрически соединенные с логическим блоком 11 переключений, причем точный датчик 15 подключей к входам 17, 18 силовых цепей, а поисковый датчик 16 дополнительным выходом 19 подключен к цепи управления последним для перевода управления гелиостатом 1 с режима грубого слежения на режим точного слежения. Система управления снабжена электрически соединенным с приводами 2, 3 с образованием электрических цепе 4 блоком 20 коммутации режимов работы, имеющим задатчик режима 21, программным блоком 22 разориентации, подключенным к дополнительным входам 23, 24 блока 20 коммутации режимов, и электрически соединенными с остальными входами 25, 26 силовых цепей логического блока 11 переключений противофазными источниками 27, 28 опорных сигналов управления зенитальным приводом 3 и источником 29 опорного сигнала управления восточной ориентацией азимутального привода 2, а поисковый датчик 16 выполнен одноосным с каналами
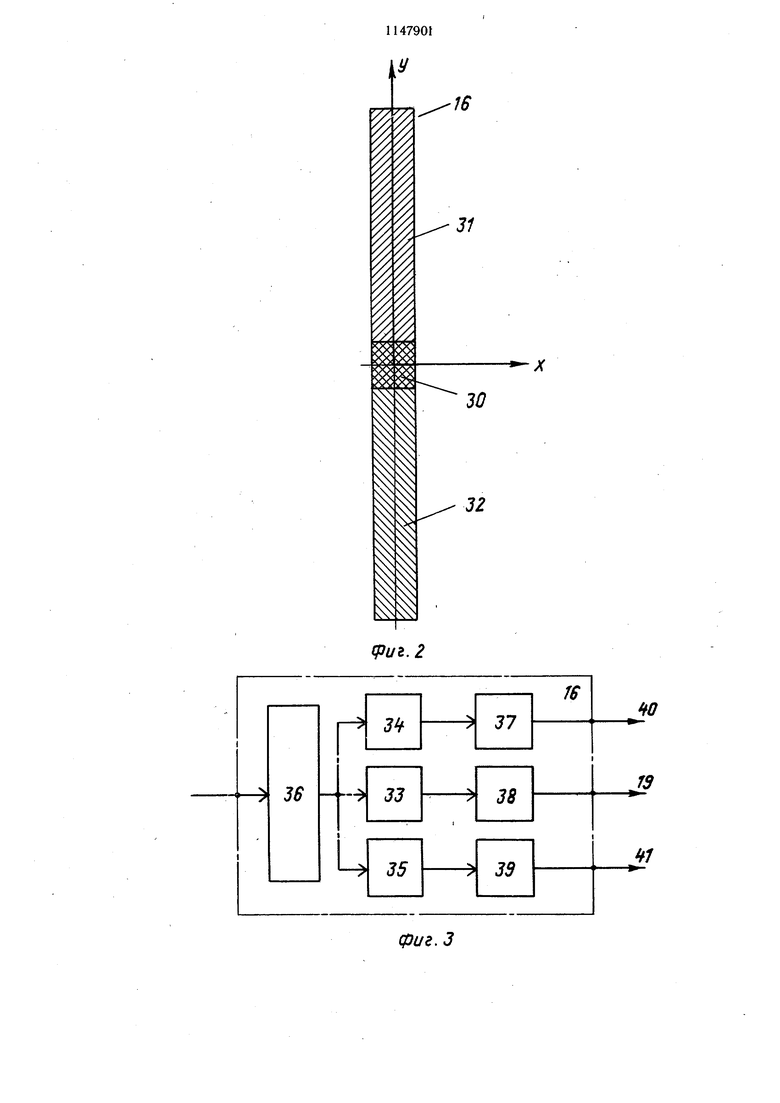
зенитального слежения, имеющим центральную зону 30 (фиг. 2) и периферийные зоны 31 и 32, причем светочувствительный элемент 33 (фиг. 3) центральной зоны 30 (фиг. 2) электрически соединен с дополнительным выходом 19 (фиг. 3), а светочувствительные элементы 34 и 35 пе.риферийных 31 и 32 (фиг. 2) - с цепями управления логическим блоком 11 (фиг. 1) переключений с возможностью подсоединения источника 29 опорного сигнала управления азимутальным приводом 2 при отсутствии сигнала со светочувствительных элементов 34, 35 (фиг. 3) и подсоединения соответствующего противофазного источника 28 или 27 (фиг. 1) опорного сигнала управления зенитальным приводом 3 при сигнале, с одного из светочувствительных элементов 34 или 35 (фиг. 3), а угол зрения поискового датчика 16 (фиг. 1 и 2) в азимуте и угол захвата в центральной зоне 30 выбраны меньше углов захвата двухосного точного датчика 15 (фиг. 1).
Поисковый датчик 16 (фиг. ЗК) имеет оптический блок 36 и усилители 37-39. Его выходы 40 и 41 подключены к цепям управления логическим блоком 11 (фиг. 1) переключений. Угол зренкя поискового датчика 16 в азимуте составляет ±2° (фиг. 2), а угол захвата в канале зенитального слежения составляет ±35°, причем в центральной зоне 30 этот угол составляет ±2°. При освещении элементов 33-35 на выходах 19, 40 и 41 появляется сигнал постоянного уровня равный 7,5 В.
Цепи управления логическим блоком 11 (фиг. 1) переключений включают пороговые устройства 42-44, инвертор 45 и источник 46 напряжения. Релейный элемент 12 имеет контакты 47 и 48, релейный элемент 13 - контакты 49 и 50, а релейный элемент 14 - контакт 51 и контактные группы 52 и 53.
Источник 29 опориого сигнала имеет делитель 54 напряжения, а источники 27 и 28 - делитель 55 напряжения и резисторы 56, 57.
Блок 20 (фиг. 1 и 4) коммутации режимов работы имеет входы 58-61 командных сигна юв «Отбой режимов, «Автоматическое сопровождение, «Автоматическое сопровождение с регулированием температуры и «Полуавтоматическое управление оператором соответственно. Блок 20 включает релейный элемент 62 с контактными группами 63 и 64, релейный элемент 65 с контактными группами 66 и 67, релейный элемент 68 с контактными группами 69 и 70, фазочувствительные выпрямители 71 и 72, источник 73 переменного напряжения и разделительный диод 74. Ко входам 75 и 76 блока 20 подключены датчики 5 и 6 соответственно. Точный датчик 15 (фиг. 1) имеет оптический блок
светочувствительные элементы, расположенные по азимутальной и зенитальной осям, и усилители (не показаны), подключенные к входам 17 и 18 силовых цепей блока 11 переключений. Датчик 15 имеет линейную характеристику в каждом канале слежения в пределах ±25 угловых минут и при выходе за эти пределы формирует на входах 17, 18 управляющий сигнал постоянного уровня, равный ±7,5 В.
Датчики 15 и 16 (фиг. 5) установлены перед центральной фацетой термостата 1 на неподвижной щтанге 77 оптически соосно.
Приводы 2 и 3 выполнены одинаково и включают сумматор 78, усилитель 79,
двигатель 80 и редуктор 81.
Система управления гелиостатом работает следующим образом.
Система может работать в трех режимах, которые задаются от внещнего источника командных сигналов, а именно задатчика режима 21; автоматическое сопровождение (АС), когда гелиостат 1 автоматически перемещается вместе с движением Солнца, сохраняя неизменным направление отраженного потока солнечной
энергии вдоль оптической оси точного датчика 15; автоматическое сопровождение с регулированием температуры (АСРТ), когда направление отраженного потока солнечной энергии может отклоняться на некоторый угол, который находится в пределах линейной
зоны точного датчика 15; полуавтоматическое управление (ПА), когда положение гелиостата 1 задается оператором с помощью задатчиков углового положения 7 по азимуту и 8 по углу места (зенитальное положение)..
В исходном положении перед началом работы гелиостат 1 находится у восточного упора, т. е. нормаль в плоскости зеркала гелиостата 1 ориентирована на восток.
Рассмотрим работу системы в режиме АС с исходного положения. При этом от задатчика режима 21 (фиг. 1) по входу 59 поступает напряжение на релейный элемент 62 (фиг. 4) блока 20 коммутации режимов работы и замыкаются его
контакты 63 и 64, обеспечивая прохождение сигналов по входам 9 и 10 от логического блока 11 (фиг. 1) переключений датчиков 15 и 16 на входы приводов 2 и 3. После подачи питания на систему от источника 46, находящегося в логическом
блоке 11 переключений, запитываются пороговое устройство 44, инвертор 45 и релейный элемент 14. При отсутствии сигнала по дополнительному выходу 19 срабатывает релейный элемент 14, при этом: замыкается
контакт 51, подавая питание на пороговые
устройства 42 и 43 и релейные элементы
12 и 13; перебрасывается контакт 52,
подключая выход делителя 54 напряжения
к выходу 9 силовых цепей блока 11
переключении; пере&рась1в;-етс; кс:-;1- ;.: J3 подключая через 56 и 5/ кь ходы делителя 55 напряжег;; ; :г выходу 10 силовых цепей блока И переключивший
Рассмотрим случай, коглн в icxo,UHOiv положении отраженный луч не попа.пает поле зрения поискового датчика-16. Тсгл:ка -его выходах 40, 41 и 19 сигна/ О1сугствует. релейные элементы 12 и Iве срабатывают и их контакты находятся в исходном состоянии {..;;,-; АО:/d зано на фиг. ). при этой на &ы}:оде ; блока П перещиОГеплЯ датчкко 5 и г, появится сигнал с делителя 5: нагь.. женкя, nocKOJibicy кснтактьЕ 47 ь 49 ::, s зомкнуты. При этом па выходе аО сиг..;:; отсутствует, поскольку контакты и и -i замь:нуты.
Сигнал с выхода 9 через б.кС:-, переключения поступает на вход суь мат-;;;: 78 азйнута ьяого привода 2 геп к-птятл и начинается его пгреь еакине д; гс/. f-, пока отра5кел-;ння от цеятра;. ф.::;-.: луч ке попадет в поле зренЕчя по;-;слсы:.;ч датчика i6.
Пусть отраженный луч попадает :: .;v, ферийную зону 31 {флг. 2) дэт--и;.« ( тогда на выход-; 4-0 .(фиг. 1} дат;;;;; . появляется сигнал, который через buporoii;;, устройство 42 поступает на релейгк-й ;;.;.;: мент 12, что гфИБОдит к 3ai ibiKaKH;3 ::v: контакта ): / разымкэлйк; его Ко:.Г1,;ч j ; При этом сигнал ьа btfxo.ae 9 принимает аулево/ ; yfjsssflb, а -;. JL-,;; .;.: 10 с ,,е :;-геля ваирйж;:,:,:. -.-t резисто :; 1 ояБЛ:-:-т - (-;,;, гр;ео;./,..; 1.к;:
Еход сум;.:аТПрй згь;;тал :.ногт, п;;.:::.;.:,& , сен Г ре;гр.;.щаетси :, начлна : тм .
j7O Vr..)И (З : : лТаЛ usiO И:) ОС, .г г L; . ;
йэзрай.., чтооь: ):;екнЬй .г/у i :)y,Ci.: по углу захаата датчика io h ст:
рОНу paiJTbKOH ЗЗЙ1;: йО (фиг. .-}.
(9 датчика 16, проходит через Г;ор(;уО;:.: устройство 44 (фиг. 1) -; Иг1.-;р--ор на релейный элемент 14, -; :х:з1 |ЬТй7: чего разivuiiкается его коктак1 иг ,,-ia;пнтапие с релейных эл мептоЕ 12 и iS перебрасываются в исходное полгокеии - KOHTascTbi 52 и 53, подключай входи / к is снлоьых цепей лля сигкало; i .;ч;:о ч датчика 15 к выходам 9 и 10 6,f.3r;a i переключекий.
При наличии OTpaJueiiHOfO СОЛН--:Ч;-К.:;; -у
ча в центральной зоне (фнг.. ::.} I:.. поискового датчика 16 луч од:и;::|:гмо;;1г(: будет к 5 поле зрения точного .«атЧЧх: 15, поэтому на зходы сумматоров .::Гл 2 и 3 гелиостата i по к V;-,i.
:че1л;е Солнца .: ргнег ием направления :.-:ф-;; е НОго сольечного потока здоль оптич ской ocii точного датчггкз 15.
Pacc;.jO-p;iiv; рйиоту систеьгы в ре. СРТ. .Цл-- иерехсда в режим АСРТ :-Ш:а/:а на . 58 блока 20 коммутации ::.х.::-.,о;; по:;ь::тся К0|.-аада гОтбойрежкр.юв )рл лоступленин коюрой релейные элементы ;Я, 6о и 68 (фиг. 4) перебрасывают свои .aiyrbi а исходко;; состояние (как это ... --.::улд5 на фнг. 4)
..jaic;., яа вход 60 блока 20 поступает .;-.:;;,:, iio .Г,уса (.:;yaS::rTb 3aiv р :лейный :-;ч--;;.,т со И :.рсз разд::-:утельный 74 - yyi :;;,: ч -v. ..;::-т G5, черебрась заются кх :::::;;::v;j б4.. Г:9 и 70, подключая Х:;хо.;;,н У а iC cjjoxa i I переключений 1с)Уй.10Б к допол;и-;тсльно ка входы 23 i 4 О ; фсграньного блока 22 разу:-е;;таинч (ф,-п-. i). STOT блок 22 х: -СУ V г;-..-.:т 1-:---сллте.:;ьный :шм:/:-:чс .:утсу,.-:й в за .с.мости от теыпераV;-.Н У,р..о1.;;-1;-;ХЗ СОЛЬСЧКОЙ ЗКерГНИ и
y.ojj ЗчлйСГо технологического процесса,
:H;)3a4;;oiyj с измененнерл температуры во
P3i,:;-;i::. ;;. чабать;вает сигналы постоянного
;агф;/:хег:н;Г rf Г1редс:.ла,: ±7,5 Б.
А рОхоххденье сигналов на выходы 9 и
П ;.; дат-;и;с :, (fc и 16 рассмотрено
.Учче ччи oii;.cii-L i работы системы в ,ia.., 4(1. L; ;::е;, нке АСРТ вместе с
:-ii :: с;:-г -да :г ;;а Гход сумматоров
;3 }7--г;т .;;;./ V;,ГНИj-bf ;/кйзаяного выше
.; ч-:: -l .;-., :::T::erS4: C; ve HOCiaT3, в этом
: . -у :.. Ч .-;ггга I за переме.. .. .1. . уУЗ 1-уу.-:. Ууа.:..;са;.. таким
- , ii. :.:..: : л;:ечно зиергии
;у... ;. уз-: тл ;. I У: зекзторг.м утлом к
ч;д;..;..-loi y-:.v; ;.учг:УУ дзтчика i 5, причем
:. .-У: /УУУУ ЛуДсТ ОП реД-вЛЯТЬСЯ
-: 3-:.;i:.4i :.::i;,;::;., :0зтупзющ«х на зходь5
чк.з..13.у,..у.; jaijo ГУ систеи1ы ь режкме ПА.
Г...- Г: .;;. зууа :- oc.i.3-;:u ilA сначала на вход
: .:..;а;-;а 5-лЗ к.зг.утацйй режимов -по: . У1 ког азу.- : Згбой р К4имои, при по.уч/;еак,- .;oTt....oh релейные элеыекты 62,
;.., 3 с8 1ф3г. 1:}. 1;ерсбрасьйают свои кон:-.:ы 3 з;:хзднез состойнке (как показа:;(: .:з i;-;. I;. За гем на вход 61 блока
:П иозтуизет , по которой ,-узлзует .е.:;:ййый, злемеят 65 и пере.ууасызаютз,; его :иштзкть 66 и 67, под.у/чо; я Бхо.1ы /о к 76 блока 20 к
Ус з.-.;;у::::-;Ч;:УГ;-;Л ,, -ЫИ Блзпркмителям 71 И 72.
л.: ;.;.:...и - 3 /О (фйг. i) посту-.
.ii3- ::г;г:У;:Л ; 3 ::г:.;ХОДОВ даТЧйКОЕ 5 и 6
I по азимуту и Hic. Входы датчиков вь;;;одамн ссответ, расЕоложенных
/с;л. фнг. 1). За.датчики 5 и 6
ут оыт; зьшолнены.
например, на сельсинах или вращающихся трансформаторах. В этом случае при hOBOpOTe ротора задатчика 7 или 8 на выходе появляется сигнал переменного тока, поступающий на вход фазочувствительного выпрямителя 71 и 72, который преобразует его в сигнал постоянного тока. Этот сигнал поступает на вход сумматора соответствующего привода 2 или 3 гелиостата 1. Гелиостат 1 будет поворачиваться до тех пор, пока угол соответствующего датчика 5 или 6 не станет равным углу задатчика 7 или 8, при этом сигнал с выхода датчика 5 или 6 углового положения гелиостата 1 становится равным нулю.
Таким образом, введение в систему управления гелиостата 1 блока 20 коммутации режимов работы с задатчиком 21 режима и программного блока 22 разориентации обеспечивают расщирение функциональных возможностей системы, что,в свою очередь, позволяет регулировать количество
солнечной энергии, поступающей к приемнику излучения.
Это дает возможность вести технологические процессы плавки различных металлов и - сплавов, где требуется изменять температуру по определенному закону в зависимости от состава материалов, а также проводить испытания различных материалов на воздействие теплового и светового излучения; .
Кроме того, в системе управления упро щена конструкция поискового датчика 16
и изменена логика его работы, обеспе- чивающая использование принципа одноослого слежения, делящегося по углам захвата
на центральную и периферийные зоны
с 30-32, что снижает стоимость системы
управления.
В пределах линейной зоны точного датчика 15 возможно осуществление слежения за положением Солнца с программируемой разориентацией, что позволяет ни0 вилировать характеристики приемников излучения.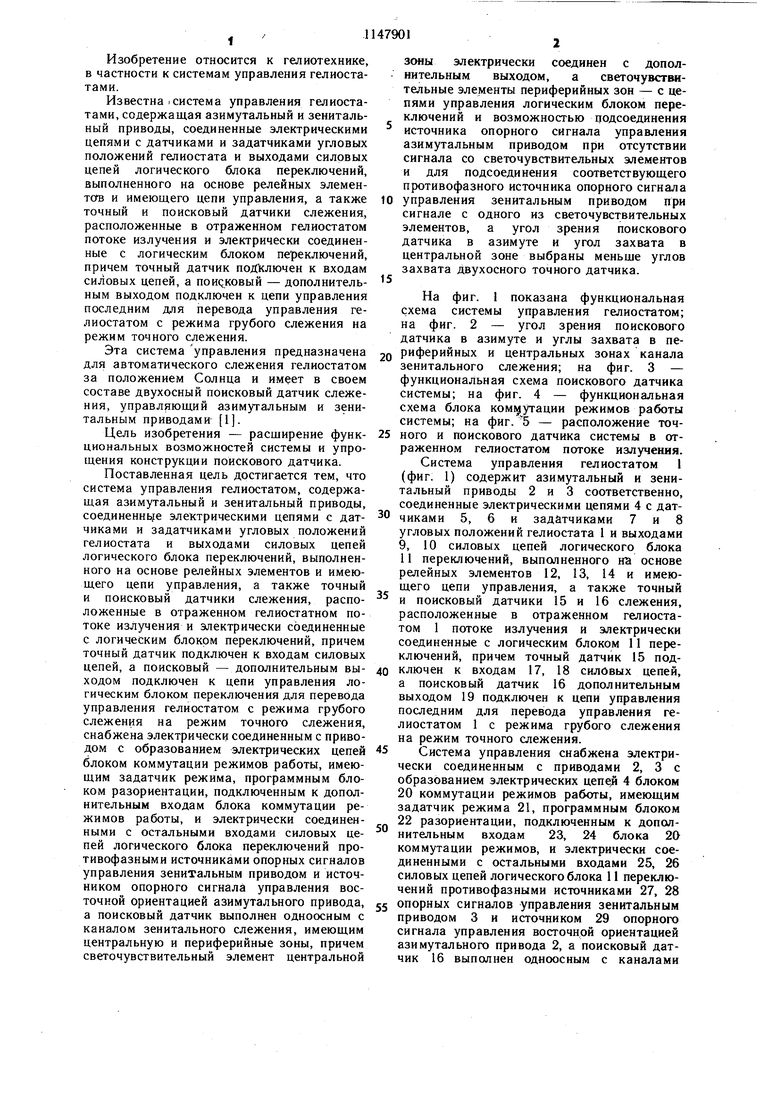



| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гелиостатом | 1985 |
|
SU1305505A2 |
| Автоматическая система управления гелиостатом | 1985 |
|
SU1322036A1 |
| Устройство управления электродвигателями | 1981 |
|
SU1081621A1 |
| Гелиокомплекс | 1983 |
|
SU1147900A1 |
| Система автоматического управления движением гелиостатов | 1981 |
|
SU1028965A1 |
| Устройство управления гелиостатом | 1983 |
|
SU1291925A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПЛАТФОРМОЙ КОНЦЕНТРАТОРНЫХ СОЛНЕЧНЫХ МОДУЛЕЙ | 2015 |
|
RU2611571C1 |
| Гелиокомплекс | 1983 |
|
SU1141274A1 |
| Система управления гелиостатом | 1983 |
|
SU1155993A1 |
| Система управления гелиостатом | 1987 |
|
SU1449786A1 |

СИСТЕМА УПРАВЛЕНИЯ ГЕЛИОСТАТОМ, содержащая азимутальный и зенитальный приводы, соединеииые электрическими цепями с датчиками и задатчиками угловых положений гелиостата и выходами силовых цепей логического блока переключений, выполненного на основе релейных элементов и имеющего цепи управления, а также точный и поисковый датчики слежения, расположенные в отраженном гелиостатом потоке излучения и электрически соединенные с логическим блоком переключений, причем точный датчик подключен ко входам силовых цепей, а поисковый - дополнительным выходом подключен к цепи управления логическим блоком переключения для перевода управления гелиостатом с режима грубого слежения на режим точного слежения, отличающаяся тем, что, с целью расширения функциональных возможностей системы и упрощения конструкции поискового датчика. система снабжена электрически соединенным с приводами с.образованием электрических цепей блоком коммутации режимов работы, имеющим задатчик режима, программным блоком разориентацин, подключенным к дополнительным входам блока коммутации режимов работы, и электрически соединенными остальными входами силовых цепей логического блока переключений противофазными источниками опорных сигналов управления зенитальным приводом и источником опорного сигнала управления восточной ориентацией азимутального привода, а поисковый датчик выполнен одноосным с каналом зенитального слежения, имеющим центральную н периферийные зоны, причем светочувствительный элемент центральной зоны электрически соединен с дополнитель(/) ным выходом, а светочувствительные элементы периферийных зон - с цепями управления логическим блоком переключений с возможностью подсоединения источника опорного сигнала управления азимутальным с приводом при отсутствии сигнала со светочувствительных элементов и подсоединения соответствующего противофазного источника опорного сигнала управления зенитальным приводом при сигнале с одного из светочувствительных элементов, а угол зрения СО поискового датчика в азимуте и угол захвата в центральной зоне выбраны меньше углов захвата двухосного точного датчика.
фиг. 3
fi offnau
figognau)
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система автоматического управления движением гелиостатов | 1981 |
|
SU1028965A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
