ю
со со
Oi Изобретение относится к электротехнике, а именно к бесконтактным управляемым двигателям, используемым в качестве исполнительных элементов следящих систем. Известен вентильный управляемый двигатель с возбуждением от постоянных магнитов, датчиком углового положения и полупроводниковым коммутатором 1. Недостатками такого двигателя является необходимость использования дорогостоящих постоянных магнитов, наличие сильных магнитных полей рассеяния, а также сложность конструкции. Наиболее близким к предлагаемому является управляемый двигатель, содержащий ротор, статор с многофазной обмоткой, полупроводниковый коммутатор и датчик положения povopa, выполненный в виде расположенных на роторе постоянных магнитов и двух расположенных на статоре электрически взаимно ортогональных систем датчиков Холла, входы одной из которых подключены к источнику напряжения управления, а другой - к источнику напряжения возбуждения, выходы датчика положения подключены к расположенной в пазах статора обмотке через полупроводниковый коммутатор 2. Недостатками этого двигателя являются значительные габариты и масса, так как датчик углового положения ротора представляет собой отдельную электрическую машину. Цель изобретения - уменьшение габаритов и массы вентильного управляемого двигателя. Указанная цель достигается тем, что в вентильном управляемом двигателе, содержащем ротор, статор с многофазной обмоткой, полупроводниковый коммутатор и датчик положения ротора, выполненный в виде расположенных на роторе постоянных магнитов и двух расположенных на статоре электрически взаимно ортогональных систем датчиков Холла, входы одной из которых подключены к источнику напряжения управления, а другой - к источнику напряжения возбуждения, выходы датчика положения подключены к расположенной в пазах статора обмотке через полупроводниковый коммутатор, ротор выполнен явнополюсным из магнитомягкого материала, в его пазы помещены постоянные магниты датчика положения, ротора, обеспечивающие намагничивание ротора по поперечной оси, а обе системы датчиков Холла установлены в пазах статора, причем датчики Холла системы, вход которой подключен к источнику напряжения возбуждения, пространственно расположены по магнитным осям фаз обмотки статора. На фиг. 1 изображена принципиальная электрическая схема двигателя; на фиг. 2 - принципиальная конструктивная схема. Вентильный управляемый двигатель содержит синхронную реактивную машину, имеющую статор 1, на котором размещена многофазная, например трехфазная, обмотка с фазами 2-4, безобмоточный явнополюсный ротор 5 из магнитомягкого материала, датчик 6 углового положения и полупроводниковый коммутатор 7. Датчик 6 углового положения включает в себя две трехфазные системы 8 и 9 гальваномагнитных преобразователей магнитного поля в ЭДС, например датчиков Холла, размещенных в пазах статора 1, и ротор в виде постоянных магнитов 10, установленных в пазах ротора 5. Оси полюсов ротора 5 и постоянных магнитов IQ электрически взаимно ортогональны и совпадают соответственно с продольной d и поперечной q осями ротора 5. В качестве постоянных магнитов 10 используется магнитотвердый материал с максимальной удельной энергией - кДж/м. Каждая система преобразователей 8 и 9 состоит соответственно из трех датчиков Холла 11 -13 и 14-16. Датчики Холла 11 -13 смещены относительно друг друга на 120 эл. град, и пространственно совпадают с магнитными осями катущек фаз 2-4. Датчики Холла 14-16 смещены относительно друг друга на 120 эл. град, и на 90 эл. град, относительно магнитных осей Катушек фаз 2-4. Входы датчиков Холла 11 -13 и 14-16 через разделительные трансформаторы 17 и 18 подключены к источникам напряжений возбуждения и управления UB и Uy соответственно. Выходы датчиков 11 и 14, 12 и 15, 13 и 16 соединены попарнопоследовательно и через полупроводниковый коммутатор 7 подключены к соответствующим фазам 2-4 обмотки статора 1. Вентильный управляемый двигатель работает следующим образом. В воздушном зазоре обесточенного двигателя по поперечной оси q действует магнитное поле от постоянных магнитов 10. При подаче напряжения UB это поле измеряется датчиками Холла 11 -13 системы 8 преобразователей. Выходные сигналы с датчиков Холла 11 -13 через полупроводниковый коммутатор 7 поступают на фазы 2-4 обмотки статора 1. Так как датчики Холла 11 -13 пространственно расположены по магнитным осям катушек фаз 2-4, а оси постоянных магнитов 10 электрически ортогональны осям полюсов ротора 5, то в воздушном зазоре двигателя по поперечной оси q ротора 5 наряду с полем от постоянных магнитов 10 возникает магнитное поле, обусловленное намагничивающей силой (н. с.) F от токов в фазах 2-4. Из-за того, что возникшее магнитное поле направлено по оси q и в то же время совпадает с осями постоянных магнитов 10, двигатель не развивает вращающего момента и ротор 5 неподвижен. Отсутствие вращающего момента при питании входов системы преобразователей является положительным фактором, исключающим ложное срабатывание следящей системы при отсутствии сигнала управления Uy. После подачи напряжения управления и датчики Холла 14-16 начинают измерять магнитное поле, действующее по поперечной оси q. Поскольку выходы датчиков Холла 11 и 14, 12 и 15, 13 и 16 соединены последовательно, то их выходные сигналы складываются друг с другом и через коммутатор 7 подаются на фазы 2-4 обмотки статора I. Вследствие того, что датчики Холла 14-16 фиксированы в пространстве относительно магнитных осей катущек фаз 2-4 со смещением в 90 эл. град, от токов в фазах 2-4 помимо н. с. F,, возникает н. с. Fd и магнитное поле, направленное по продольной оси d ротора 5. Поэтому при одновременной подаче напряжений U и Ue в воздущном зазоре действует суммарное магнитное поле, составляющими которого являются магнитное поле по поперечной оси - поле от постоянных магнитов 10 и н. с. Fq и магнитное поле по продольной оси - Поле от н. с. Fj. В результате возникает вращающий момент, равный сумме двух моментов, один из которых определяется полем постоянных магнитов, а другой - суммарным магнитным полем. Вращающий момент от поля постоянных магнитов незначителен вследствие низкой удельной энергии применяемых магнитов и поэтому не оказывает влияния на работу двигателя. Дальнейщая коммутация токов в фазах 2-4 происходит по выходным сигналам датчиков Холла обеих систем 8 и 9, измеряющих суммарное магнитное поле. При последовательной коммутации токов в фазах 2-4 посредством датчика 6 положения и полупроводникового коммутатора 7 суммарное поле, а вместе с ним и ротор 5, вращаются со скоростью, пропорциональной напряжению Uy. Регулирование скорости вращения вентильного управляемого двигателя осуществляется изменением амплитуды напряжения Uy, а реверс - изменением на 180 эл. град, фазы напряжения U. Таким образом, предлагаемое устройство при тех же функциональных возможностях имеет меньщую массу и габариты и более низкую стоимости благодаря совмещению магнитных цепей датчика и двигателя.

| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОПОЛЮСНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2015 |
|
RU2597993C1 |
| Вентильный электродвигатель | 1977 |
|
SU675544A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1990 |
|
RU2006143C1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2017 |
|
RU2662233C1 |
| Вентильный электродвигатель | 1986 |
|
SU1476572A2 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ | 2012 |
|
RU2510877C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА С ДВУХПАКЕТНЫМ ИНДУКТОРОМ (ВАРИАНТЫ) | 2008 |
|
RU2356154C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2009 |
|
RU2408972C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416859C1 |
ВЕНТИЛЬНЫЙ УПРАВЛЯЕМЫЙ ДВИГАТЕЛЬ, содержащий ротор, статор с многофазной обмоткой, полупроводниковый коммутатор и датчик положения ротора, выполненный в виде расположенных на роторе постоянных магнитов и двух расположенных на статоре электрически взаимно ортогональных систем датчиков Холла, входы одной из которых подключены к источнику напряжения возбуждения, а другой - к источнику, напряжения управления, а вы.ходы через полупроводниковый коммутатор к обмотке, размещенной в пазах статора, отличающийся тем, что, с целью уменьщения габаритов и массы, ротор выполнен явнополюсным из магнитомягкого материала, а в его пазы помещены постоянные магниты датчика положения ротора, обеспечивающие намагничивание ротора по поперечной оси, а обе системы датчиков Холла установлены в пазах статора, причем датчики Хаала системы, вход которой подключен к источнику напряжения возбуждения, пространственно расположены по магнитным осям фаз обмотки статора.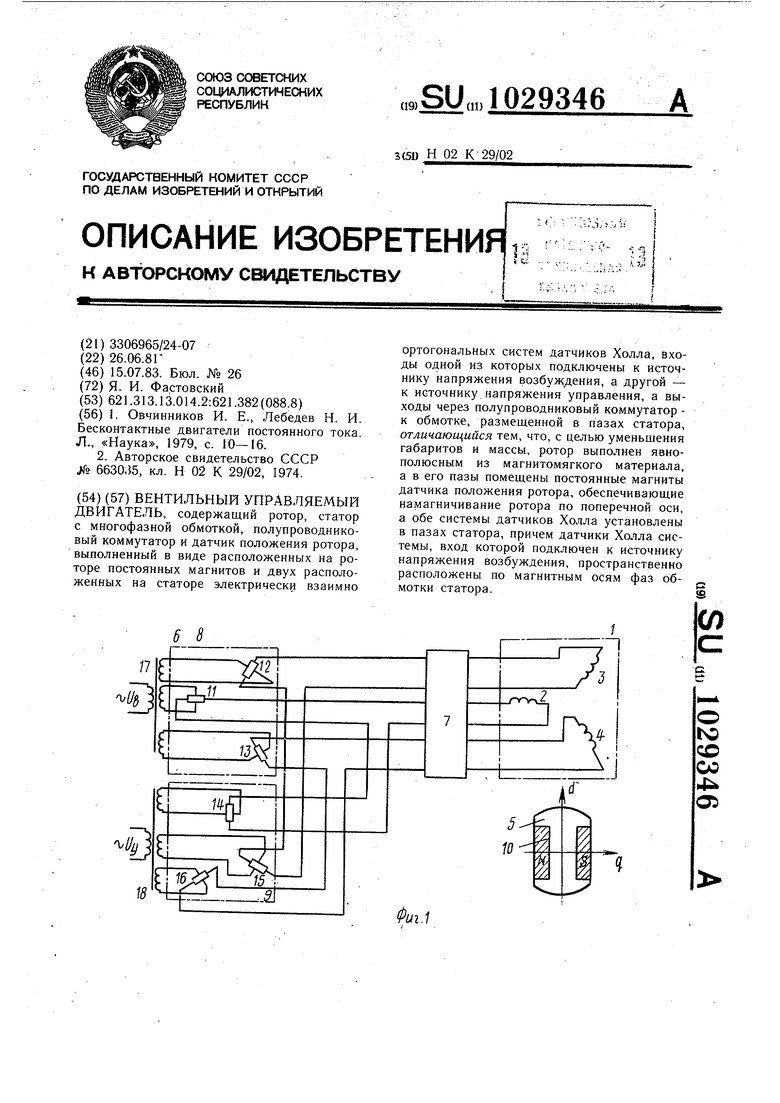
11
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Овчинников И | |||
| Е., Лебедев Н | |||
| И | |||
| Бесконтактные двигатели постоянного тока | |||
| Л., «Наука, 1979, с | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
