мента соеа1инен с запрещающим входом Первого и второгчз счетчиков и вторым входом второго триггера, выхоц третьего формирователя соединен с вторыми нхо дами третьего и четвертого ключевмк: элементов, выход третьего ключеaorcs зшемента соединен с разрешающим вхо дом пятого счетчика и вторым входом третьего триггера, выход четвертого формирователя соединен с вторыми вхо- дами пятого и шестого ключевых элемен« тов, выход четвертого ключевого элемеН та соединен с разрешающим входом чет вертого счетчика и вторым входом чет вертого ключевого элемента, выхоц пя того ключевого элемента соединен с -за
прещаюшим входом пятого счетчика, раз решающим входом шестого счетчика и вторым входом пятого триггера; вькод шестого ключевого элемента соединен с запрещающими входами четвертого и шеетого счетчиков, вторым входом шестого триггера и третьим выходом блока выде пения двух подпедовательно расположенных точек изпепия, первые входы тригге ров соединены с соответствующими выхо-. дами блока опознавания двух послеаова тельно распоиоженных точек изделия, генератора тактовых импульсов сое-, дршен со счетными входами счетчиков, выхоа каждого из которых соеш-шенс соответствующим вкодом вычислигельного блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров движения нити | 1981 |
|
SU970225A1 |
| Многоканальное устройство для программного управления автоматической линией изготовления многослойных керамических конденсаторов | 1990 |
|
SU1804642A3 |
| Устройство для обнаружения ошибок при передаче данных по телефонному каналу | 1989 |
|
SU1755377A1 |
| Устройство для обнаружения ошибок при передаче данных по телефонному каналу | 1987 |
|
SU1559415A1 |
| Замкнутая телевизионная система для измерения объектов | 1987 |
|
SU1412004A1 |
| Устройство для контроля цифровыхОб'ЕКТОВ | 1979 |
|
SU851410A1 |
| ТЕПЛОВИЗОР НА ОСНОВЕ "СМОТРЯЩЕЙ" МАТРИЦЫ ФОРМАТА 256×256 | 2008 |
|
RU2382516C2 |
| УСТРОЙСТВО ОХРАННОЙ СИГНАЛИЗАЦИИ С АДРЕСНОЙ СВЯЗЬЮ | 1991 |
|
RU2069014C1 |
| Устройство для ввода-вывода информации из накопителей на магнитных дисках | 1982 |
|
SU1019431A1 |
| Устройство для контроля длины движущихся изделий | 1986 |
|
SU1420348A1 |
1. Способ измерения параметров движения длинномерных изделий, заклю- лается в том, что по ходу движения из делия устанавливают базовый и допол- нительный датчики положения и измеряют время прохождения двумя последователь но расположенными точками изделия расстояния между ними, отличающие и с я тем, что, с целью расширения функциональных возможностей, за счет обеспечения измерения линейной деформации, устанавливают по ходу движения изделия на фиксированном расстоянии второй базовый и второй дополнительный датчики, положения, измеряют время прохождения двумя последовательно расположенными точками изделия расстояния между этими датчиками и время прохождения участком, ограниченным двумя последовательно расположенными точками изделия, расстояния между первым и вторым базовыми датчиками положения. 2, Устройство для намерения парамет ров цвижения длинномерных изделий, QO- держащее три датчика положения изделия и соединенные с ними три формирователя, блок корреляционного измерения скорости, входы которого соединены с вько дами первого и второго формирователей, пять ключевых элементов и пять триггеров, выход каждого из которых сое- д1-шен с первым входом соответствующего ключевого элемента, генератор тактовых импульсов, вьгаислительный блок с индикатором и два счетчика, соециненные с входами вычислительного блока, о т л и чающееся тем, что, оно снабжено блоком выделения цвух последовательно с S расположенных точек изделия, четверть м датчиком положения и соединенным с ним четвертым формфователем, блоком опознавания двух послецовательно расположенных точек изде.ггйя, последовательно сое- дшюнными шестым триггером и шестым ключевым элементом, и четырьх я счет чиками, вход блока выцеления двух со последовательно расположенных точек изделия соединен с вы-ходом первого формирователя, первый выход с разрешатощим входом первого счетчика и первым входом блока опознавания двзх последо™ ISD вательно расположенных точек изделия, второй выход - с разрешающим входом третьего счетчика и вторым входом бло«. ка опознавания цвух послецовательно расположенных точек изделия, выход первого ключевого элемента С1 еаинен с разрешающим входом второго счетчика, за- прешающим входом третьего счетчика и. вторым входом первого триггера, выход второго формирователя соед1шен с вторыми входами первого и второго ключевых элементов, выход второго ключевого эле-
Изобретение относится к вьяислитель ной технике и предназначено для измерения линейных деформаций длинномерных изделий, например ленты, ровницы, нити из натуральных и химических волокон в процессе формирования продуктов пряде ния на текстильных машинах. Известен способ измерения параметро движения длинномерных изделий, зак,йюча кзщийся в том, что по ходу движения изделия устанавливают базовый и допо,1ши-. тельный датчики положения и измеряют время прохождения двумя последователь но расположенными точками изделия рас стояния между ними ClI .
Недостатком способа являются ограниченные функциональные возможности, так как невозможно измерять линейные деформации изделия.
Известно устройство для- измерения ш раметров длинномерньк изделий, содер жащее три датчика положения изделия и соединенные с ними три формироват€ ля, блок корреляционного измерения скоро оти, входы которого соединены с выходами первого и второго формирователей, пять ключевых элементов и пять трй;гге ров, выход каждого из которых соединен с первым входом соответствующего 1шк чевого элемента, генератор тактовызс импульсов, вычислительный блок с ИНДЕИ катером и два счетчика, соециненны(5 с шсоцами вычислительного блока 2 „
Недостаток устройства ограниченные функциональные возможности.
Цель изобретения расширение функци ональных возможностей за счет обеспече™ ния измерения линейной деформации.
Поставленная цель достигается тем. что согласно способу измерения ларамет. ров движения длинномерных издепий, за ключающемуся в том, что по ходу движения изделия устанавливают базовый и дополБ;ительный датчики положения и из меряют время прохо каения двумя последовательно расположенными точками из делия расстояния меж1ду ними, устана&- ливают по ходу движения изделия на фиксированном расстоянии второй базо« вый и второй дополнительный-датчики положения, измеряют время прохождения двумя последовательно расположенными точками изделия расстояния между этими датчиками и время прохождения участком огранргченным двумя последовательно рас положенными точками изделия, расстояния между первым и вторым базовыми цатчи ками положения,
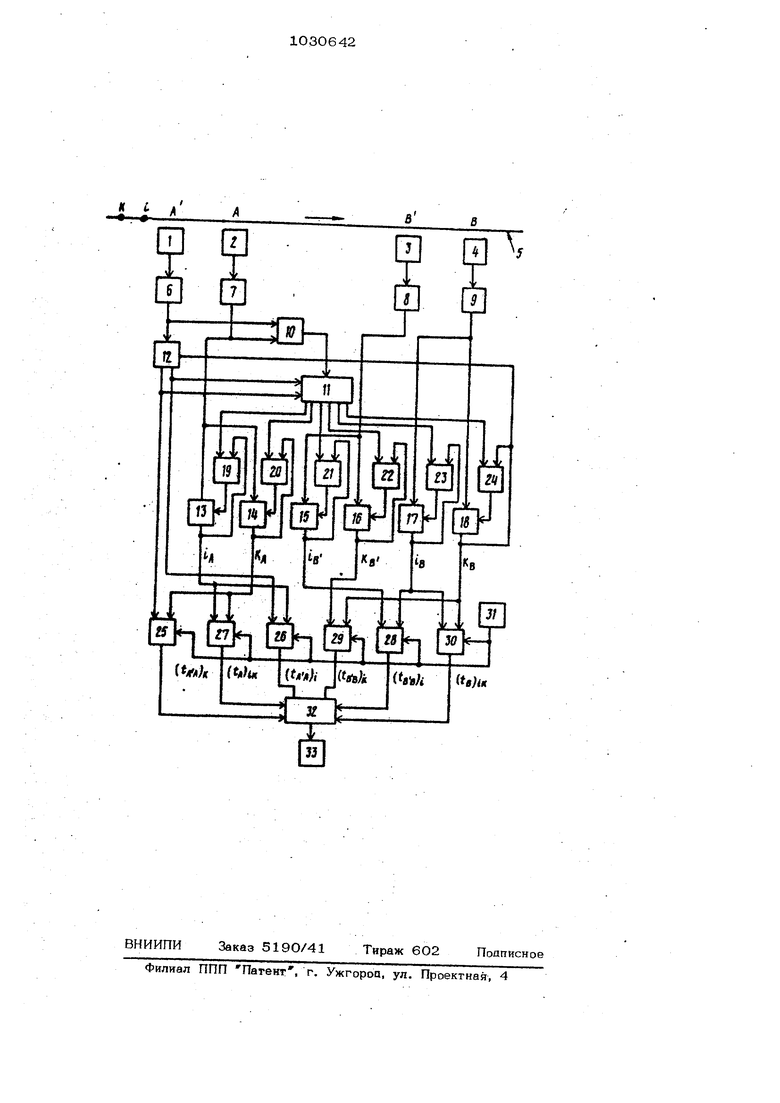
того, устройство для измерения параметров движения длинномерных из делий, содеркащее три датчика положе- ния изделия и соединенные с ними три формирователя, блок корреляционного из мврзния скорости, входы которого соецинены с выходами первого и второго формирователей, пять ключевых элеменTDB и пять триггеров, выход каждого из которых соединен с первых входом сооть ввтствуюшего ключевого элемента, ге- нератор тактовых импульсов, вычисли 310 тепьный бпок с индикатором и цра счетчика, соединенные с вхоцами вычислительного блока, снабжено блоком выце- ления двух .послецовательно расположенны точек изделия, четвертым датчиком положения и соецин.енным с ним четверть}м фор ирователем, блоком опознавания двух последовательно расположенных точек изделия, последовательно соединенными шестым триггером и шестым ключевым элементом, и четырьмя счетчиками, вход блока выделения двух последовательно расположенных точек изделия соединен с выходом первого формирователя, первый выход - с разрешающим входом первого счетчика и первым входом блока опознавания двух последовательно расположенных точек изделия, второй выход - с разрешающим входом третьего счетчика и вторым входом блока опознавания двух последовательно расположенных точек изделия, выход первого ключевого элемента соединен с разрешающим входом второго счетчика, запрещающим нходом третьего счетчика и вторым входом первого триггера, выход второго формирователя соединен с вторыми входами пе вого и второго ключевых элементов, выход второго ключевого элемента соединен с запрещающим входом первого и вт рого счетчиков и вторым входом второго триггера, выход третьего формирователя соединен с вторыми входами третьего и четвертого ключевых элементов, выход третьего ключевого элемента соединен с разрешающим входом пятого счетчика и вторым входом третьего триггера, выход четвертого формирователя соединен с . вторыми входами пятого и шестого ключевых элементов, выход четвертого ключевого элемента соединен с разрешающим входом четвертого счетчика и вто рым входом четвертого ключевого элеме та, выход пятого ключевого элемента соеаинен с запрещающим входом пятого счетчика, разрешаюшим входом шестого счет чика и вторым входом пятого триггера, выход шестого ключевого элемента соединен с запрещающими входами четвертого и шестого счетчиков, вторым входо шестого триггера и третьим выходом бло выделения двух последовательно расположенных точек изделия, первые входы триггеров соединены с соответствующими выходами блока опознавания двух последовательно расположенных точек изделия выход генератора тактовых импульсов соединен со счетными входами счетчиков выход каждого из которых соед1шен с 24 соответствующим входом вычислительного блока. На чертеже показана блок-схема описываемого устройства. Устройство содержит четыре датчика 1 « 4 положения изделия 5, нити, установленные вдоль линии его движения и связанные своими выходами с четырьмя формирователями 6-9 импульсов, « блок 10 корреляционного измерения ско- рости, блок 11 опознавания двух последовательно расположенных точек изделия, блок 12 выделения двух последовательно расположенных точек изделия, ключевые элементы 13. - 18, триггера 19 - 24, счетчики 25 - 30, генератор 31 тактовых импульсов, вычислительный блок 32 с индикатором 33. Выходы формирователей 6 и 7 соединены с входами блока 10 корреляционного 1гамерения скорости, вьсход которого с одним из входов блока 11 опознавания двух последовательно расположенных точек изделия, выход формирователя 6 соед1шен с входом блока 12 выделения последовательно расположенньк точек изделия,-а формирователь 7 соединен с основными входами ключевых . ментов 13 и 14.-Выход формирователя 8 соединен с основными входами клю- чевьк, элементов 15 и 16, а выход формирователя 9 соедшюн с основными входами ключевых элементов 17 и 18. Выхоаы блока 11 соед1шены соответственно с оаним из входов триггеров 19-24, выходы которых соединены соответственно с упраапяющими входами элементов 1318, выходы которых соединены с другими входами триггеров 19-24. Выходы блока 12 соединены с разрешающими входами счетчиков 25 и 26. Выход элемента 13 соецинен с разрешающими входами счётчика 27 и запрещающим входом счетчика 26, выход ключевого элемента 14 соединен с запрещающими входами счетчиков 25 и 27. Счетные входы счетчиков 25 - 30 соединены с генератором 31 TaKTOBbLx импульсов, а выходы этих счетчиков с входами исходных данных блока 32, выход результата измерения которого соецинен с 1Ш- чика то ром 33, Сущность способа заключается в следующем. На длинномерном изделии, например нити, существуют дефектные утолщения (узлы, сукрутины и другие), которые при прохождении мимо датчиков положе- 10 яия вызывают появления импульсных сигналов. Если в качестве двух поелоцовательно расположенных точек изделия выбрать сосецние дефектные утолщенш f и К нити, и измерять время прохождения этими утолщениями расстояния между первыми базовыми (А) и дополнительными (А) датчиками положения, а затем измертть время прохождения этими утолщениями расстояния между вторыми базО выми {в) и дополнительными (В) датчика- ми положения и время прохождения участ ком, ограниченными этими утолщениями, расстояния между первым и вторым безо вьгми датчиками положения, то, исполь зуя пол5гченные значения, величину относительной линейной деформации можно попучить из формулы J, .(AA)iMt,J,{t,);, (6B)i4SBW(H)iK A)I -время прохождения утолшением т расстояния датчиками А Aj , ( К .- время прохождения утол« щением k расстояния между датчиками АА| время прохождения дефект .(5h ным участком Itc базового датчика Bj -время прокожцения дефекр ным участком fk базового датчика А; время прохождения утолще нием i расстояния, датчикам,и В В| ввЬ время прохождения утолще нием 1с расстояния между датчиками ВВ. Способ с помощью устройства осушес впяется следующим образом. Ин4 ормация о наличии дефектных щений снимается датчиками 1 4 и подается на формирователи 6 - 9 импул1ь« COJB, где происходит формирование корень кшс импульсов от дефектных утолщений нити 5. Фо{ииирование импульсов от ц.е фвКШых у ошдений происходит за счет прввьппения ими сишалов заданного ня, С выхода формирователя 6 импулызы от дефектных утолщений поступают в блок 12, гае выделяются сигналы от следующих друг за другом утолщений, после чего работа блока 12 блокируется до прохождения вктявпеняыми дефектными 2 толшениями { i и всех четырех дат- иков 1 - 4, В блоке 11 определяется наиболее вероятное время прохождения соседними дефектными утолщениями датчиков 2 - 4с учетом скорости движения нити, момен „ тов прохождения соседних дефектных утол щений мимо датчика 1 и девиации ско роста нити 5, С блока 11 импульсыJ соответствую щие наиболее вероятному прохождению со седних дефектных утолщений i и k мимо датчиков 2 4, поступают на один из входов соответствующих триггеров 19 i24, которые удерживают ключевые эле менты 13«18 в открытом состоянии о , момента вероятного ожидания до момента прихода импульсов соседних дефективных утолшений i и Кс формиро вателей 7-9. Таким образом, на выходе ключевого элемента 13 определится им-пульс i л , характеризующий прохождение . дефектного утолщения и мимо датчика 2, .На выходах ключевых элементов 14-18. определятся г мпульсы К., ig, gi , „ Импульсы с блока 12 и ключевых эдамен тов 13.- 8 поступают на входы счетчи ков , где левый вход счетчиков разрешение на зшчало счета импульсов с генератора 31 тактовых импульсов, а правый вход запрещение на счет такте вых импульсов. Частота генератора 31 выбирается из требуемой точности и мас1Н« таба измерений. Счетчик 25 определяет временный интервал ( Мл)1с) соответ ственно счетчики определяют тервалы (t )-., (д1д -, (tg,g), 1-fcgr Q ),-, ( tg ) . С выходор счетчи. ков значения указанных временных интервалов поступают на входы исходных данных блока 32, где вычисляется зави симость Р- ()i(./J(B)i °(BB).i/(4Bk(t)iK -Изобретение позволяет повысить каче ство продуктов прядения за счет устано впения допустимых границ изменения линейной деформации в короткие промажут ки времени и повысить производительно- сть оборудования, так как обеспечивает своевременную наладку технологического оборудования по полученным диагностическим сигналам.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кольцевая агломерационная машина для спекания материалов под давлением | 1977 |
|
SU670787A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3269557/18/1О, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
