ОО
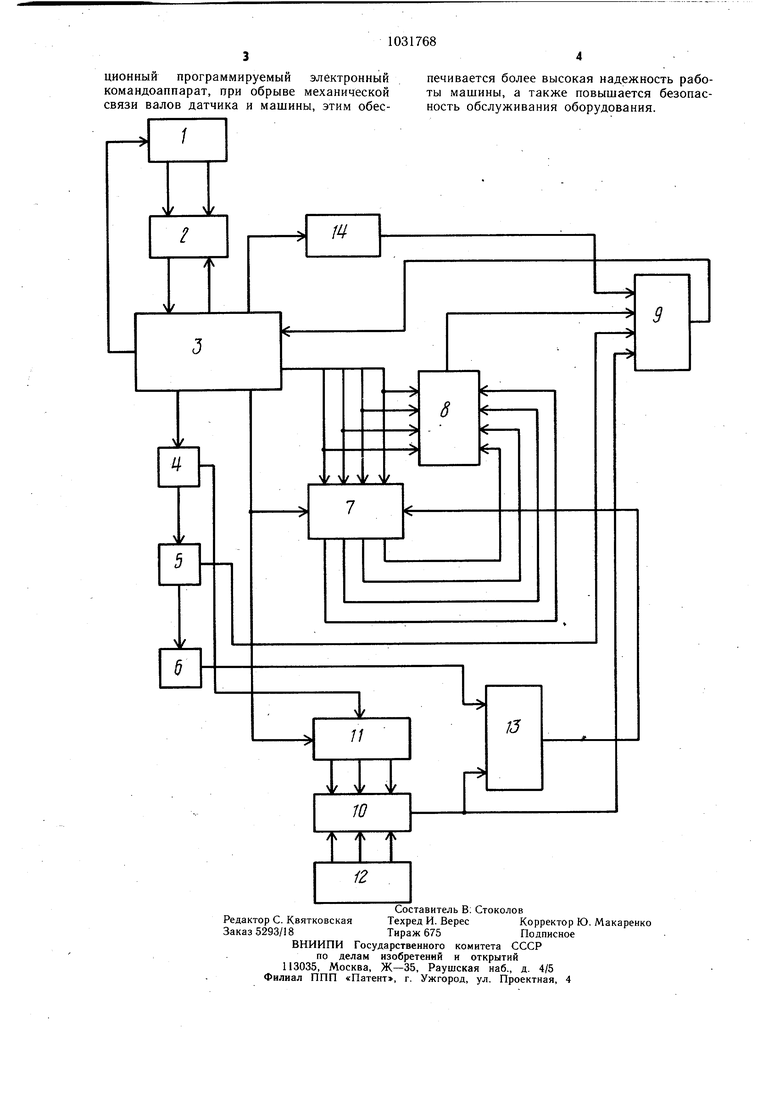
Од 00 Изобретение относится к машиностроению, в частности к конструкции систем управления оборудованием для обработки давлением. Известно устройство управления рабочим валом кузнечно-прессовой машины, содержаш.ее датчик его углового положения, соединенный с дистанционно-программируемым командоаппаратом, и логическую схему 1. Однако при переналадках, кроме командоаппарата, необходимо регулировать и положение датчиков углового положения, что снижает надежность получения сигналов останова машины при поломках в приводе и передачах, а также при резком (не предусмотренном режимом работы) снижении скорости рабочего вала. Цель изобретения - повышение надежности. Указанная цель достигается тем, что в устройстве управления рабочим валом ... , кузнечно-прессовой машины, содержащем датчик его углового положения, соединенный с дистанционно-программируемым командоаппаратом, и логическую схему, последняя выполнена в виде соединенных между собой трех формирователей - сигналов временных импульсов, останова машины и кода угла, трех блоков - сравнения, совпадения и блокировки регистра кода угла ключа, а также блока выработки временного интервала, соединенного с выходами счетчика и задатчика временных интервалов, причем упомянутые три формирователя соединены последовательно, выход блока выработки временных интервалов соединен с блоком совпадения и через ключ с входом регистра кода угла, другие входы последнего подключены к выходам- дистанционно-программируемого командоаппарата, а выходы соединены с блоком сравнения, при этом блок блокировки соединен с дистанционнопрограммируемым командоаппаратом и блоком совпадения, другой вход последнего связан с выходом формирователя сигнала останова мащины. На чертеже представлена структурная схема предлагаемого устройства. Устройство содержит привод 1 рабочего вала, датчик 2 углового положения рабочего вала машины, дистанционно-программируемый (электронный) командоаппарат 3, формирователь 4 сигналов временных импульсов формирователь 5 сигнала останова машины, формирователь 6 сигнала для записи его в регистре 7, где хранится код предыдущего значения углового положения рабочего вала. Устройство также содержит блок 8 сравнения кодов углов, блок 9 совпадения, формирующий сигнал отключения, блок 10 выработки временного интервала, счетчик 11 временного интервала, задатчик 12 временкого интервала, ключ 13, осуществляющий запись в регистр текущего значения угла поворота вала датчика, блок 14 блокировки, исключающий выработку сигнала отключения при пуске машины, а также при снижении угловой скорости при входе инструмента в заготовку. Устройство работает следующим образом. Валы привода 1 эксцентрикового вала и датчик 2 углового положения вала мащины жестко связаны между собой. Управление валом машины осуществляется с помощью дистанционно-программируемого электронного командоаппарата 3. С выхода командоаппарата 3 на формирователь 4 сигналов временных импульсов поступает импульс, вырабатываемый в момент перехода напряжения роторной обмотки датчика 2 через нуль в положительную полуволну. С формирователя 4 сигнал поступает на формирователь 5 сигнала останова, а с него - на формирователь 6 сигнала записи текущего угла в регистр 7. Сигналы с формирователей 4-6 организуют работу всего устройства. По сигналу сброса из командоаппарата 3 регистр 7 кода предыдущего значения угла поворота вала и счетчик И временного интервала устанавливаются в нулевое состояние. Коды текущего значения угла поворота вала датчика 2, поступающие с командоаппарата 3, и предыдущего с регистра 7 поступают в блок 8 сравнения и при равёнстве кодов в блок 9 совпадения поступает сигнал, соответствующий прекращению вращения вала датчика 2 или резкому снижению его частоты вращения. Импульсы, поступающий с формирователя 4, заполняют счетчик 11 временного интервала и при равенстве его величины и величины установленного на задатчике 12 временного интервала с блока 10 выработки временного интервала поступает сигнал в блок 9 совпадения. При отсутствии сигнала с блока 14 блокировки исключается выработка сигнала отключения при пуске машин, а также при снижении скорости вращения при входе инструмента в заготовку. При наличии сигналов блока 8 и блока 10 по команде формирователя 5 с выхода блока 9 совпадения в командоаппарат 3 поступает сигнал остановки машины. Запись кода предыдущего значения угла поворота вала датчика 2 в регистр 7 производится по сигналу ключа 13 при наличии сигналов с формирователя 6 и блока 10. Таким образом, предлагаемое устройство управления рабочим валом благодаря сравнению кодов текущего и предыдущего значения углового положения вала датчика сигналов задатчика и счетчика временных интервалов, а также формирователей управляющих сигналов позволяет прекратить работу машины, когда использован дистан
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления рабочим валом машины | 1981 |
|
SU1055556A1 |
| Устройство для контроля рабочих органов машины | 1990 |
|
SU1787356A1 |
| Способ определения технического состояния двигателей внутреннего сгорания и устройство для его осуществления | 2018 |
|
RU2721992C1 |
| Устройство для измерения мощности цилиндров двигателя внутреннего сгорания | 1990 |
|
SU1789898A1 |
| Система передачи и приема сигналов контроля | 1981 |
|
SU999081A1 |
| Устройство дозированной подачи поворота роторной стрелы экскаватора | 1977 |
|
SU747941A1 |
| Устройство для управления токарнымСТАНКОМ | 1979 |
|
SU830314A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208771C2 |
| СПОСОБ ВЫКЛЮЧЕНИЯ ЖИДКОСТНЫХ РАКЕТНЫХ ДВИГАТЕЛЕЙ СОСТАВНОЙ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2079690C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 1980 |
|
SU1840148A1 |
УСТРОЙСТВО УПРАВЛЕНИЯ РАБОЧИМ ВАЛОМ КУЗНЕЧНО-ПРЕССОВОЙ МАШИНЫ, содержащее датчик его углового положения, соединенный с дистанционно-программируемым командоаппаратом, и логическую схему, отличающееся тем, что, с целью повышения надежности, логическая схема выполнена в виде соединенных между собой трех формирователей - сигналов временных импульсов, останова машины и кода угла, трех блоков - сравнения, совпадения и блокивровки, регистра кода угла, ключа, а также блока выработки временного интервала, соединенного с выходами счетчика и задатчика временных интервалов, причем упомянутые три формирователя соединены последовательно, выход блока выработки временных интервалов соединен с блоком совпадения и через ключ с входом регистра кода угла, другие входы последнего подключены к выходам дистанционно-программируемого командоаппарата, а выходы соединены с блоком сравнения, при этом блок блокировки соединен с дистанционнопрограммируемым командоаппаратом и блоком совпаденияя другой вход последнего связан с выходом формирователя сигнала останова машины.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 7770342/27, кл | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
