(5) УСТРОЙСТВО для ТОРМОЖЕНИЯ БЕСКОНТАКТНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для торможения бесконтактного двигателя постоянного тока | 1981 |
|
SU1020952A1 |
| Устройство для стабилизациичАСТОТы ВРАщЕНия бЕСКОНТАКТНОгОдВигАТЕля пОСТОяННОгО TOKA | 1979 |
|
SU851715A1 |
| Управляемый вентильный электродвигатель | 1986 |
|
SU1410212A2 |
| Устройство для управления вентильным электродвигателем | 1988 |
|
SU1640805A1 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1030929A1 |
| Реверсивный вентильный двигатель | 1979 |
|
SU826513A1 |
| Вентильный электродвигатель | 1978 |
|
SU785929A1 |
| Управляемый вентильный электродвигатель | 1985 |
|
SU1259463A1 |
| Вентильный электродвигатель | 1985 |
|
SU1257773A2 |
| Устройство для управления бесконтактным двигателем постоянного тока | 1988 |
|
SU1713038A1 |
1
Изобретение относится к электротехнике и может быть использовано в системах и устройствах, где требуется реверсиванное регулирование и экстренное торможение, например, в позиционном приводе, в приводе мотор-колес различных транспортных средств и т.д.
Известны устройства для торможения бесконтактного двигателя постоянного тока, осуществляющие динамическое и генераторное торможение 1 3Недостатком таких устройств торможения является,во-первых, то,что для перевода двигателя из одного режима работы в другой требуется выполнение двух отдельных операций, связанных с воздействием на силовую цепь и на цепи датчика положения ротора и во-вторых то, что требуется дополнительная установка силовых выпрямительных мостов и реле, коммутирующих силовые цепи.
Известно устройство для торможения бесконтактного двигателя постоянного тока, содержащее управляемый реверсор, подключенный своими выходами к цепям управления формирователей сигналов правого и левого направлений вращения, связанных входами с выходами датчика положения
10 ротора, а выходами через управляемую логическую схему ЗАПРЕТ с цепями управления ключей коммутатора секций якорной обмотки двигателя 2.
5 Недостатком известного устройства является низкая точность останова и значительное время готовности.
Целью изобретения является повышение точности и уменьше20ние времени готовности к очередному пуску двигателя.
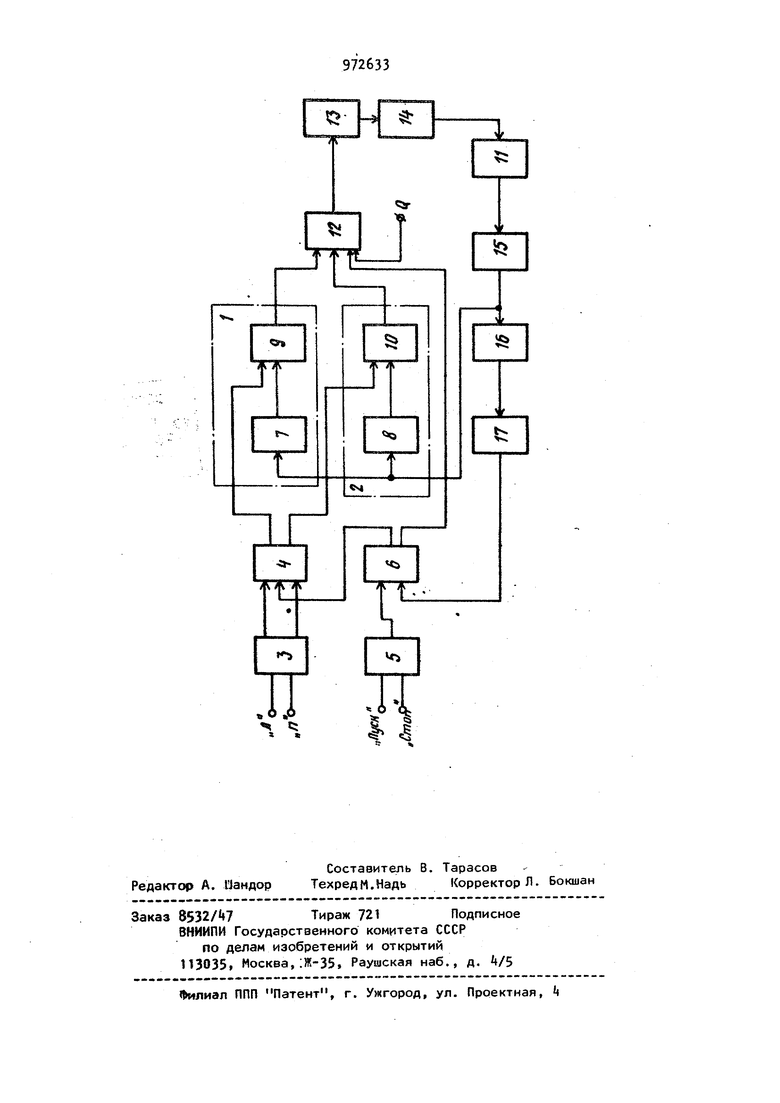
Поставленная цель достигается тем, что устройство для торможения бескон39тактного двигателя постоянного тока, содержащее управляемый реверсор, подключенный своими выходами к цепям управления формирователей сигналов правого и левого направлений вращения, связанных входами с выходами датчика положения ротора, а выходами через управляемую логическую схему ЗАПРЕТ - с цепями управления ключей коммутатора секций якорной обмотки двигателя, дополнительно снабжено по следовательно соединенными формирователем импульсов частоты, кратной частоты вращения,- и интег рирующим каскадом, причем упомянутый формирователь подключен к выходу датчика положения ротора, а интегрирующий каскад - к цепям управления ревесора и логической схемы ЗАПРЕТ. На чертеже изображена блок-схема устройства для торможения бесконтактного двигателя постоянного тока. Устройство содержит формирователи 1и 2 сигналов правого и левого направлений вращения, источник 3 управляющего сигнала на реверс(Л и П ) управляемый реверсор Ц, источник 5 управляющего сигнала на осостанов (Пуск .и Стоп) логическую схему ЗАПРЕТ 6. Формирователи 1 и 2сигналов правого и левого направлений вращения состоят из групп логических схем И 7, 8 и дешифраторов 9, 10. Кроме того, в устройство входят датчик положения ротора 11, управляемая логическая схема ЗАПРЕТ 12, коммутатор 13-секций якорной обмотки, двигатель , формирователь 15 сигналов датчика 11 положения ротора, формирователь 16 импульсов час тоты , кратной частоте вращения и интегрирующий каскад 17. Управляемый реверсор А подключен своими выходами к цепям управления формирователей 1 и 2 сигналов право го и левого направлений вращения, с стоящих из групп логических схем И 7, 8 и дешифраторов 9 Ю. Формирователи 1 и 2 связаны входами с вы дом датчика 11 положения ротора чер формирователь 15 сигналов датчика 1 а выходами через управляемую логическую схему ЗАПРЕТ 12 - с цепями у равления ключей коммутатора -13 секций якорной обмотки двигателя И. Д чик П положения ротора с одним ком 3 плектом чувствительных элементов через формирователь 15 сигналов датчика 11 подключен к последовательно соединенным формирователю 16 сигналов частоты,,кратной частоте вращения и интегрирующему каскаду 17, вы--ход которого через логическую схему ЗАПРЕТ 6 подключен к цепям управления реверсора и логической схемы ЗАПРЕТ 12, которая снабжена дополнительным управляющим входом Q. Устройство функционирует следующим образом. При налич11и сигнала Пуск на источнике 5 управляющего .сигнала на разгон и сигнала П на источнике 3 управляющего сигнала на реверс сигналы датчика 11 положения ротора через формирователь 15 сигналов датчика 11 и группы логических схем И 7, 8 поступает на дешифраторы 9 10Управляемый реверсор k разрешает функционирование тому дешифратору, например, 9 который обеспечивает формирование сигналов нужного направления - в данном случае, правого. Сформированные надлежащим образом сигналы датчика 11 положения ротора через управляемую логическую схему ЗАПРЕТ 12 поступают на цепи управления ключей коммутатора 13 секций якор ной обмотки двигателя 1. Ротор двигателя вращается вправо. При изменеНИИ сигнала с П на Л в источнике 3 управляющего сигнала реверс двигатель 14 реверсируется, поскольку сигналы с датчика 11 положения ротора будут поступать на цепи управления ключей коммутатора 13 уже через формирователь 2 сигналов левого направления вращения (через дешифратор 10). Внутренняя обратная связь по частоте вращения используется с целью фиксации окончания тормозного режима и состоит из формирователя 16 сигналов частоты, кратной частоте вращения, выполненного на логических схемах И, ИЛИ и интегрирующего каскада 17. В целях исключения мертвых зон при пуске двигателя и для нормальней коммутации при любом направлении вращения, сигналы с датчика 11 положения ротора формируются с взаимным перекрытием, что позволяет применить указанные логические схемы И и ИЛИ 5, для формирования импульсов обратной связи по частоте вращения. На выходе интегрирующего каскада 17 при вращении ротора двигателя си нал равен нулю, а в режиме стоянки логической единице. Следовательно при команде Стоп на источнике 5 управляющего сигнала на останов интегрирующий каскад 17 своим нулевым сигналом переключает логическую схему ЗАПРЕТ 6, которая выдает нулевой сигнал на управляемый реверсор 4 и сигнал логической единицы на управляемую логическую схему ЗАПРЕТ 12. Таким образом, управляемый ревер сор k реверсирует двигатель Н на противоположное вращение на время . действия нулевого сигнала интегрирующего каскада 17, т.е. до остановки двигателя. При остановке двигателя на выходе интегрирующего кас када 17 сигнал меняется с нуля на л гическую единицу, при этом управляе мый реверсор возвращается в исходное положение, определяемое сотоянием источника управляющего си|- нала на реверс, а на вход логическо схемы ЗАПРЕТ 12 подается нулевой си нал, который блокирует ее и от;Ключает секции якорной обмотки двигателя от источника питания. Такое состояние будет до подачи команды Пуск, т.е. до снятия блокировки логической схемы ЗАПРЕТ 12. Логическая схема ЗАПРЕТ 12 имеет дополнительный вход (Q), служащий для введения импульсного сигнала уп равления частотой вращения и отключения обмоток двигателя от источника питания. 3 Таким образом, устройство обеспечивает минимальное время торможения и точную остановку ротора двигателя без применения внешних обратных связей по частоте вращения. Формула изобретения Устройство для торможения бесконтактного двигателя постоянного тока, содержащее управляемый реверсор, подключенный своими выходами к цепям управления формирователей сигналов правого и левого направлений вращения , связанных входами с выходами датчика положения ротора, а выходами через управляемую логическую схему ЗАПРЕТ - с цепями управления ключей коммутатора секций якорной обмотки двигателя, отли чающееся тем, что, с целью повышения точности останова и уменьшения времени готовности, оно снабжено последовательно соединенными формирователем импульсов частоты, кратной частоты вращения,и интегрирующим каскадом, причем упомянутый формирователь подключен к выходу датчика положения ротора, а интегрирующий каскад - к цепям управления реверсора и логической схемы ЗАПРЕТ. Источники информации, ринятые во внимание при экспертизе 1, Пожидаев В. М.Омельченко В.В, есконтактные электродвигатели посоянного тока. ВИКИ им. А.Ф.Можайскоо, 1577, с. S5-96. 2. Авторское свидетельство СССР 15295, кл. Н 02 р 7/00, 1968.
