Изобретение относится к электротехнике, в частности к устройствам управления торможением шаговых двигателей, и может быть использовано в системах автоматики и телемеханики, где нредъявляются высокие требования к точности позиционирования без значительных потерь в быстродействии системы при большом количестве отрабатываемых шагов.
Цель изобретения - снижение времени и повьЕпение точности торможения шагового двигателя
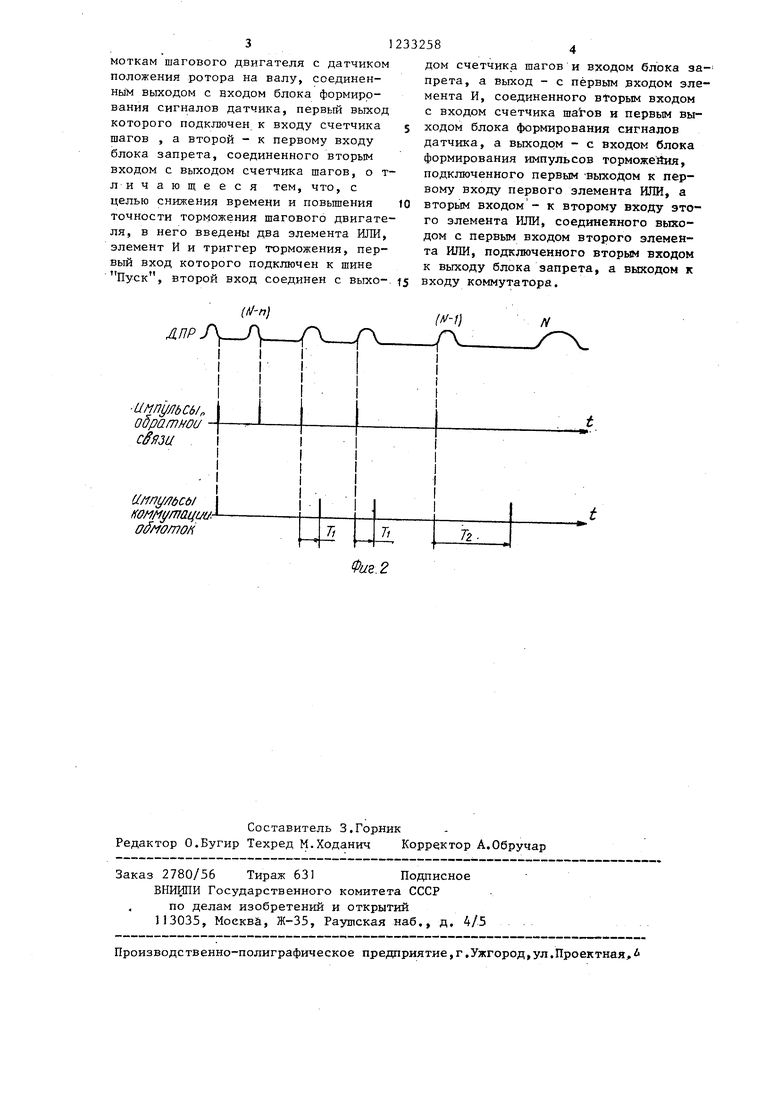
На фиг.1 приведена функциональная схема устройстваJ на фиг.2 - временные диаграммы сигналов, поясняющие работу схемы.
Устройство (фиг„) содержит блок I формирования импульсов то.рможения, счетчик 2 шагов, блок 3 запрета, бло 4 формирования сигналов .датчика, дат чик 5 положения ротора, шаговый двигатель 6, усилители 7 мощности коммутатор 8, элементы ЕЛИ 9 и 10, элемент И 11, триггер 12 торможения,
Счетчик 2 шагов может быть выполнен на микросхемах 564 НЕ 11, блок формирования импульсов торможения - на микросхемах ЗбДИЕШ, 564ra2s 564ЛА8, 564ЛЕ5 и 564ЛЕ10, коммутатор выполнен по схеме регистра сдвига а блок формирования сигналов датчика - на микросхемах серри 564 и состоит из D-триггеров, элементов И-НЕ и ИЛИ-НЕ.
Устройство работает следующим образом.
Сигналы с датчика 5 через блок 4 формирования, блок 3 запрета, схему ИЛИ 9 и коммутатор 8 поступают на вход усилителей 7 обеспечивая работу двигателя 6 в режиме самокоммута- ции. Одновременно с блока 4 формирования сигналов датчика (фиг,2 ДПР), поступают на счетчик 2 шагов, который с каждым сигналом датчика 5 уменьшает свое состояние на единицу о В режиме разгона и движения двигателя с постоянной скоростью триггер 12 торможения сигналом Пуск устанавливается в состояние, при котором элемент И 11 оказывается заблокированным для имйулъсов , поступающих с блока формирования сигналов датчик. .. С поступлением на счетчик 2(N-n)-ro сигнала, где N - прлное число отра- батьгааемых шагов, an- число шагов на торможение, на выходе счетчи:ка 2
1
появляется сигнал, по которому блок 3 запрета запрещает прохожд,ение (К-п)Го сигнала датчика .на коммутатор 8, Кроме того, этот же сигнал пе- ребрасывает триггер 12 в состояние разблокировки элемента И 11. При этом на блок 1 Начинают поступать сигналы датчика. Каждый поступивший сигнал блок торможения задерживает
0 на время Т, и с такой задержкой подает через элементы ИЛИ 10 и 9 на коммутатор (фиг.2). С появлением на счетчике 2(N-l)-ro состояния блок 1 выдает сигнал на коммутацию- послед5 него шага с задержкой Т, после отработки которого работа устройства заканчивается. Запрет одного и-мпуль- са и последующая коммутация с задержкой Т, приводят к тому, что на интер0 вале п шагов ротор максимально замедляется и к моменту фиксации, т.е. последнего переключения обмоток, подходит с минимальными колебаниями„ Параметры п,5 Т, и Т определяются пу5 тем математического моделирования на
ЭВМ экстремальных случаев работы привода с учетом возможного разброса параметров двигателя, нагрузки и температуры окру:{;ающей среды следуюшлм образом: п - как наименьшее число шагов замедле.ния (включая последний шаг), достаточное для снижения ско рости до величины, обеспечивающей
устойчивое торможение на последнем 5 шаге для случая работы привода при наименьшем возможном моменте двигателя, нашшньшей нагрузке на двигатель и максимально возможной температуре окружающей среды; Т, - как
0
Т, i t t
Mvifi
, где u t
«WH
- минимальное
время отработки одного шага, определяемое ,цля случая максимально возможного момента двигателя и минимальной нагрузки; Т - период собственных з/гловых колебаний привода для случая работы в средних условиях.
Формула изобретения
Устройство для управления шаговым двигателем, содержаш;ее блок формирования нзчпз льсов торможения, .счетчик шагов, блок запрета, шину Пуск, блок формирования сигналов датчика
положения ротора, усилитет и мошности, коммутатор, соединенный выходами с соот зетствуюш ими входами усилителей мощности, подк.люченных выходами к обмоткам шагового двигателя с датчиком положения ротора на валу, соединенным выходом с входом блока формирования сигналов датчика, первый выход которого подключен к входу счетчика шагов , а второй - к первому входу блока запрета, соединенного вторым входом с выходом счетчика шагов, о т- личающееся тем, что, с целью снижения времени и повьш1ения точности торможения шагового двигателя, в него введены два элемента ИЛИ, элемент И и триггер торможения, пер- вьш вход которого подключен к шине Пуск, второй вход соединен с выхо-.
дом счетчика шагов и входом блока запрета, а выход - с первым входом элемента И, соединенного BtopbiM входом с входом счетчика ша гов и первым выходом блока формирования сигналов датчика, а выходом - с входом блока формирования импульсов тррможейия, подключенного первым -выходом к первому входу первого элемента ИЛИ, а вторым входом - к второму входу этого элемента ИЛИ, соединенного выходом с первым входом второго элемента ИЛИ, подключенного вторым входом к выходу блока запрета, а выходом к входу коммутатора.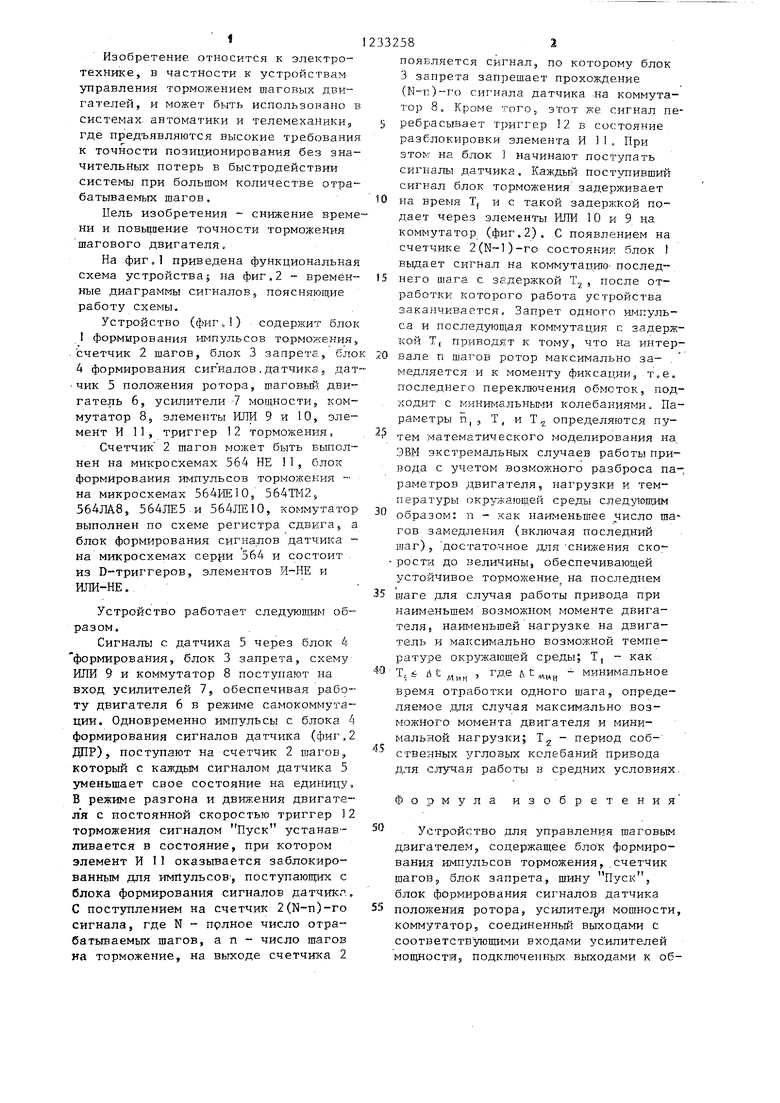
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым двигателем | 1987 |
|
SU1480079A1 |
| Способ торможения шагового электродвигателя и устройство для его осуществления | 1982 |
|
SU1032585A1 |
| Позиционный шаговый электропривод | 1979 |
|
SU811479A1 |
| Следящая система | 1982 |
|
SU1081622A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1721783A1 |
| ШАГОВЫЙ ЭЛЕКТРОПРИВОД | 1988 |
|
RU2076451C1 |
| Устройство для позиционного управления шаговым двигателем | 1979 |
|
SU924816A1 |
| Позиционный дискретный электропривод | 1985 |
|
SU1352474A1 |
| Устройство для управления шаговым двигателем | 1982 |
|
SU1046893A1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1334350A1 |
Изобретение относится к электротехнике и направлено на снижение времени и повьшение точности торможения шагового двигателя. Устройст-во для уп1 авления шаговым двигателем 6 содержит блок 1 формирования импульсов торможения, счетчик 2 шагов, блок 3 запрета, блок 4 формирования сигналов датчика, датчик 5 положения ротора, усилители 7 мощности, коммутатор 8, элементы ИЛИ 9 и 10, элемент И 11 и триггер 12 торможения. Каждый поступивший сигнал блок торможения задерживает на время Т, и с такой задержкой подает через элементы ИЛИ на коммутатор. С появлением на счетчике 2(N-l)-ro состояния (N - полное число отрабатываемых шагов) блок 1 выдает сигнал на коммутацию последнего шага с задержкой Tj, после отработки которого работа заканчивается. За- - прет одного испульса и последующая коммутация с задержкой Т, приводят к тому, что на интервале п (п - число шагов на торможение) шагов ротор максимально .замедляется и к моменту фиксации подходит с минимальными колебаниями. 2 ил. шаг i (Л ю ос ОС IN: 01 а
| Длскретный электропривод с шаговыми двигателями./Под ред | |||
| М.Г.Чи- линина | |||
| М.:Энергия, 1971, с.546-562 | |||
| Способ торможения шагового электродвигателя и устройство для его осуществления | 1982 |
|
SU1032585A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
