сд
со ю со tc
Изобретение относится к электротехнике, а именно к прецизионному автоматизированному электроприводу с вентильным электродвигателем и может быть использовано в системах автоматики и вычислительной техники, а также в станкостроении в системах с программным управлением.
По основному авт. св. № 843121 известно устройство для управления вентильным электродвигателем, содержащее цифровой задатчик частоты вращения, выходом связанный с одним входом элемента памяти, выход которого соединен с прямым входом частотно-фазового дискриминатора, выходом соединенного с другим входом элемента памяти и входом многоканального кольцевого коммутатора, узел сравнения, содержащий элементы И по числу каналов устройства и многоходовой элемент ИЛИ-НЕ, выход которого является выходом узла сравнения, электронный коммутатор, к силовым ключам которого подключены выходы элементов И узла .запрета, датчик положения ротора, чувствительные элементы которого соединены с входами формирователей. Одни входы элементов И узла сравнения соединены с соответствующими выходами кольцевого коммутатора, другие входы - с выходами формирователей соответствующего канала, а выходы - с входами элемента ИЛИ-НЕ, выход которого, являющийся выходом узла сравнения, соединен с инверсным входом частотно-фазового дискриминатора и одними входами элементов И узла запрета, другие входы которых соединены с соответствующими выходами кольцевого коммутатора.
Введение узла сравнения, частотно-фазового дискриминатора и элемента памяти, соединенных указанным образом, обеспечивает возможность регулирования частоты вращения двигателя при «активной нагрузке и повыщение точности стабилизации за счет активного торможения двигателя 1
Недостатками известного устройства являются повышенные пульсации частоты вращения и повышенная мощность, потребляемая двигателем в режиме торможения. Это связано с тем, что, если в силу некоторых причин (сброс нагрузки, увеличение «активной нагрузки, действующей в направлении вращения, повышение напряжения питания двигателя, уменьшение частоты управления и др.) частота вращения двигателя превышает частоту управления, задаваемую цифровым задатчиком, ротор попадает в зону действия соседнего (Следующего по направлению вращения) дйтчика раньше, чем происходит новый импульс частоты управления. При этом обмотка двигателя, заданная кольцевым коммутатором, запитывается, обеспечивая активное торможение ротора, но состояние кольцевого коммутатора не изменяется до тех пор, пока ротор не возвращается вновь в зону действия датчика.
соответствующего состоянию кольцевого коммутатора. Следовательно ротор не только тормозится до нуля, но и изменяет направление вращения на противоположное с тем, чтобы возвратившись в зону действия датчика, соответствующего состоянию кольцевого коммутатора, вновь разогнаться до заданной частоты вращения что приводит к значительным пульсациям частоты вращения и работе двигателя в энергетически на0 именее экономичных режимах, т.е. в режимах активного торможения и последующей разгона.
Цель изобретения - повыщение стабильности частоты вращения двигателя и уменьщение потребляемой им мощности.
Поставленная цель достигается тем, что в устройство для управления вентильным электродвигателем введены дополнительный элемент И и дополнительный узел сравнения, содержащий элементы И по числу ка0 налов устройства и многовходовой элемент ИЛИ-НЕ, входы которого соединены с вы. ходами элементов И дополнительного узла сравнения, одни из которых подключены к выходам формирователей соответствующего канала, а другие - к выходам предыдущих каналов кольцевого коммутатора, выход элемента ИЛИ-НЕ основного узла сравнения соединен с инверсньш входом частотно-фазового дискриминатора через дополнительный элемент И, вторым входом подключенный к выходу элемента ИЛИНЕ дополнительного узла сравнения.
Это позволяет определить местонахождение ротора, как в зоне действия датчика, соответствующего состоянию кольцевого коммутатора, так и в зоне соседнего (следующего по направлению вращения) датчика и выработать сигнал на изменение состояния кольцевого коммутатора с поступлением очередного импульса частоты управления, как в случае нахождения ротора в зоне действия датчика, соответствующего
состоянию кольцевого коммутатора, так и в случае нахождения рртора в зоне действия соседнего датчика, что при положении ротора, опережающем заданное, обеспечивает обесточивание обмотки двигателя и свободный выбег ротора в зоне действия датчика, соответствующего новому состоянию кольцевого коммутатора. Этим устраняется торможение ротора до нуля и изменение направления его вращения на обрат ное, что снижает пульсации частоты вращения и потребляемую двигателем мощность На чертеже приведена функциональная схема устройства с тремя каналами.
Устройство содержит датчики 1-3 положения ротора, формирователи 4-6, электронный коммутатор 7 с силовыми ключами,
5 узел 8 запрета, основной узел 9 сравнения, содержащий элементы И 10-12 по числу каналов устройства и выходной многовходной элемент ИЛИ-НЕ 13, дополнительный узел 14 сравнения, выполненный аналогично основному узлу 9 сравнения на элементах И 15-17 и многовходовом элементе ИЛИНЕ 18, многоканальный кольцевой коммутатор 19, элемент И 20, частотно-фазовый дискриминатор 21, элемент 22 памяти, цифровой задатчик 23 частоты вращения двигателя. Входами каждого из узлов 9 и 14 сравнения являются входы элементов И 10-12 и элементов И 15-17, а выходом - выходы элементов ИЛИ-НЕ 13 и 18 соответственно. Выходы датчиков 1-3 положения ротора соединены с входами формирователей 4-6 соответствующих каналов устройства. Входы электронного коммутатора 7 соединены с выходами узла 8 запрета, к входам к торого подсоединены выходы кольцевого коммутатора 19 и выход первого узла 9 сравнения. Одни входы узлов 9 и 14 сравнения соединены с выходами кольцевого коммутатора 19, а другие входы - с выходами формирователей 4-6. При этом один из входов каждого из элементов И ЛО-12 узла сравнения 9 подключен к выходу кольцевого коммутатора 19, а другой -,к выходу формирователя, соединенного с датчиком V положения ротора, соответствующим данному каналу кольцевого коммутатора 19, один из входов каждого элемента И 15-17 узла 14 сравнения подключен к. выходам формирователей 4-6 соответствующего канала, а другой - к выходам предыдущих каналов кольцевого коммутатора 19. Выход узла 9 сравнения соединен с входом, узла 8 запрета и с одним входом элемента И 20, другой вход которого подсоединен к выходу узла 14 сравиения. Выход элемента И 20 соединен с инверсным входом частотно-фазового дискриминатора 21, прямой вход которого соединен с выходом элемента 22 памяти, а выход - с входом кольцевого коммутатора 19 и одним входом элемента 22 памяти, другой вход которого соединен с выходом цифрового задатчика 23 частоты вращения. К выходам электронного коммутатора 7 (силовым ключам) подсоединяются статорные обмотки 24-26 двигателя. Устройство работает следующим образом. . В момент подачи напряжения питания ротор двигателя находится в каком-то произвольном положении, информацию о котором выдает один из датчиков 1-3 положения ротора. Кольцевой коммутатор 19 также находится в каком-то произвольном положении. При этом, если заданное кольцевым коммутатором 19 случайное состояние не соответствует действительному положению ротора, узел 9 сравнения дает разрещение на прохождение сигнала с какого-то (случайно установивщегося при включении) выхода кольцевого коммутатора 19 через узел 8 запрета на электронный коммутатор 7, обеспечивающий подключение к источнику питания соответствующей обмотки двигателя. Одновременно узел 9 сравнения выдаетсигнал «Логическая 1 на вход элемента «И 20. В зависимости , в каком положении находится ротор двигателя относительно заданного (в опережающем или отстающем) второй узел 14 сравнения выдает на другой вход элемента И 20 сигналы «Логический 0 или «Логическая, соответственно. Элемент И 20, в свою очередь, выдает на инверсный вход частотнофазового дискриминатора 21 сигнал «Логический О, разрешающий прохождение импульса частоты управляющего с цифрового задатчика 23 или сигнал «Логическая 1, запрещающий прохождение этого импульса через дискриминатор 21. Предположим, что импульсы частоты управления еще не поступали с цифрового задатчика 23, тогда состояние кольцевого коммутатора 19 не изменяется. Ввиду того, что обмотка двигателя запитана, ротор разворачивается и принимает заданное кольцевым коммутатором положение, что фиксирует соответствующий датчик 1-3 информация с которого через формирователь 4-6 поступает на вход узлов 9 и 14. При этом узел сравнения 9 выдает сигнал «Логический О, который, поступая на узел запрета 8, запрещает поступление сигнала из кольцевого коммутатора 19 на электронный коммутатор 7, и обмотки 24-26 двигателя обесточиваются. Второй узел 14 сравнения выдает сигнал «Логическая 1.Сигналы с узлов сравнения 9 и 14 поступают на элемент «И 20; выдающий сигнал «Логический 0 на инверсный вход частотно-фазового дискриминатора 21, который разрещает прохождение импульсов частоты управления на вход кольцевого коммутатора 19, т.е. устройство подготавливается к отработке частоты управления. При этом импульс частоты управления, поступающий с выхода цифрового задатчика 23 на элемент 22 памяти, переписывается в частотно-фазовый дискриминатор 21 при наличии на его инверсном входе логического «О и, проходя через дискриминатор, поступает на кольцевой коммутатор 19, изменяя его состояние на следующее. Тот же импульс, поступая с выхода частотно-фазового дискриминатора 21 на другой вход элемента 22 памяти, списывает содержащуюся в нем информацию, подготавливая элемент патйяти к приему следующего импульса частоты управления. Если к моменту импульса на элемент 22 памяти на инверсном входе частотно-фазового дискриминаторе 21 присутств ует сигнал «Логическая (ротор находится в фазе, отстающей от заданной), то прищедщий импульс запоминается элементом 22, но через частотно-фазовый дискриминатор 21 на кольцевой коммутатор 19 не проходит. Однако с приходом .на дискриминатор 21 сигнала «Логический О, т.е. в момент, когда ротор занимает заданное ему кольцевым коммут;атором 19 положение, хранящийся в элементе памяти 22 импульс, проходит через дискриминатор 21 на кольцевой коммутатор 19, состояние которого изменяется. Узел сравнения 9 вновь выдает сигнал «Логическая 1,обмотка двигателя, заданная кольцевым коммутатором 19, запитывается, и ротор доворачивается из исходного положения до заданного, т.е. за счет сохранения в элементе 22 памяти импульса частоты управления двигатель разгоняется по собственной характеристике и во время разгона работает в режиме самокоммутации. Аналогично устройство работает и в случае необходимости повышения частоты вращения двигателя. По достижении двигателем скорости, заданной задатчиком 23, ротор устанавливается в заданное ему кольцевым коммутатором 19 положение раньше, чем приходит следующий импульс частоты управления. При этом (как было описано) с обмотки 24 и 26, снимается питание, и двигатель продолжает вращение в зоне действия соответствующего датчика положения ротора. Если ротор выходит из зоны действия датчика, соответствующего заданному кольцевым коммутатором 19 положению, и входит в зону действия следующего по направлению вращения датчика (действительное положение ротора опережает заданное), узел 9 сравнения выдает на узел 8 запрета сигнал «Логическая 1, разремающий подключение электронным коммутатором 7 обмотки двигателя, соответствующей соС тоянию кольцевого коммутатора 19, к источнику питания. Одновременно дополнительный узел 14 сравнения выдает сигнал «Логический 0, который, проходя через элемент И на инверсный вход частотно-фазового дискриминатора 21, разрешает прохождение импульса частоты управления на кольцевой коммутатор 19. В этом случае устройство находится в состоянии, при котором обмотка двигателя оказывается запитанной, но дискриминатор готов пропустить импульс частоты управления, с поступлениием которого из цифрового задатчика 23 через дискриминатор 21 на кольцевой коммутатор 19 состояние последнего изменяется на следующее. Так как новое состояние кольцевого коммутатора 19 соответствует датчику, в зону действия которого входит ротор, узел сравнения 9 выдает сигнал «Логический 0, в результате действия которого сигнал с узла 8 запрета закрывает ключи электронного коммутатора 7, обмотка двигателя отключается от источника питания, и двигатель продолжает вращение в зоне действия датчика незапитанным до прихода очередного импульса управления. Таким образом, в предлагаемом устройстве время активного торможения ротора дози.руется дополнительно временем выхода ротора из зоны действия датчика, соответствующего заданному кольцевым коммутатором положению, и временем прихода очередного импульса частоты управления, а не только временем выхода ротора из зоны действия датчика, соответствующего заданному положению ротора, и временем возвращения ротора в зону действия указанного датчика. Тем самым исключается торможение ротора до нуля и изменение направления его вращения при осуществлении активного торможения, благодаря чему уменьщаются пульсации частоты вращения и снижается потребляемая двигателем мощность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления вентильнымэлЕКТРОдВигАТЕлЕМ | 1979 |
|
SU843121A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2000 |
|
RU2202147C2 |
| ИМПУЛЬСНАЯ ЧАСТОТНО-ФАЗОВАЯ СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2007 |
|
RU2342762C1 |
| Вентильный электропривод | 1990 |
|
SU1767688A1 |
| ЧАСТОТНО-ФАЗОВАЯ СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2011 |
|
RU2510126C2 |
| Стабилизированный бесконтактный двигатель с комбинированным управлением | 1987 |
|
SU1522355A1 |
| Стабилизированный параметрический электродвигатель | 1987 |
|
SU1555773A1 |
| Устройство для управления частотой вращения ротора асинхронного электродвигателя | 1984 |
|
SU1277343A1 |
| Регулируемый электропривод переменного тока | 1987 |
|
SU1494193A1 |
| Устройство для стабилизации час-ТОТы ВРАщЕНия бЕСКОНТАКТНОгО элЕКТРО-дВигАТЕля пОСТОяННОгО TOKA | 1978 |
|
SU813648A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ по авт. св. № 843121, отличающееся тем, что, с целью повышения стабильности частоты вращения двигателя и уменьшения потребляемой им мощности, введены дополнительный элемент И и дополнительный узел сравнения, содержаш.ий элементы И по числу каналов устройства и многовходовой элемент ИЛИ-НЕ, входы которого соедине-. ны с выходами элементов И дополнительного узла сравнения, одни из входов которых подключены к выходам формирователей соответствующего канала, а другие - к выходам предыдущих каналов кольцевого коммутатора, выход элемента ИЛИ-НЕ основного узла сравнения .соединен с инверсным входом частотно-фазового дискриминатора через дополнительный элемент И, вторым входом подключенный к выходу элемента ИЛИ-НЕ дополнительного узла сравнения. i (Л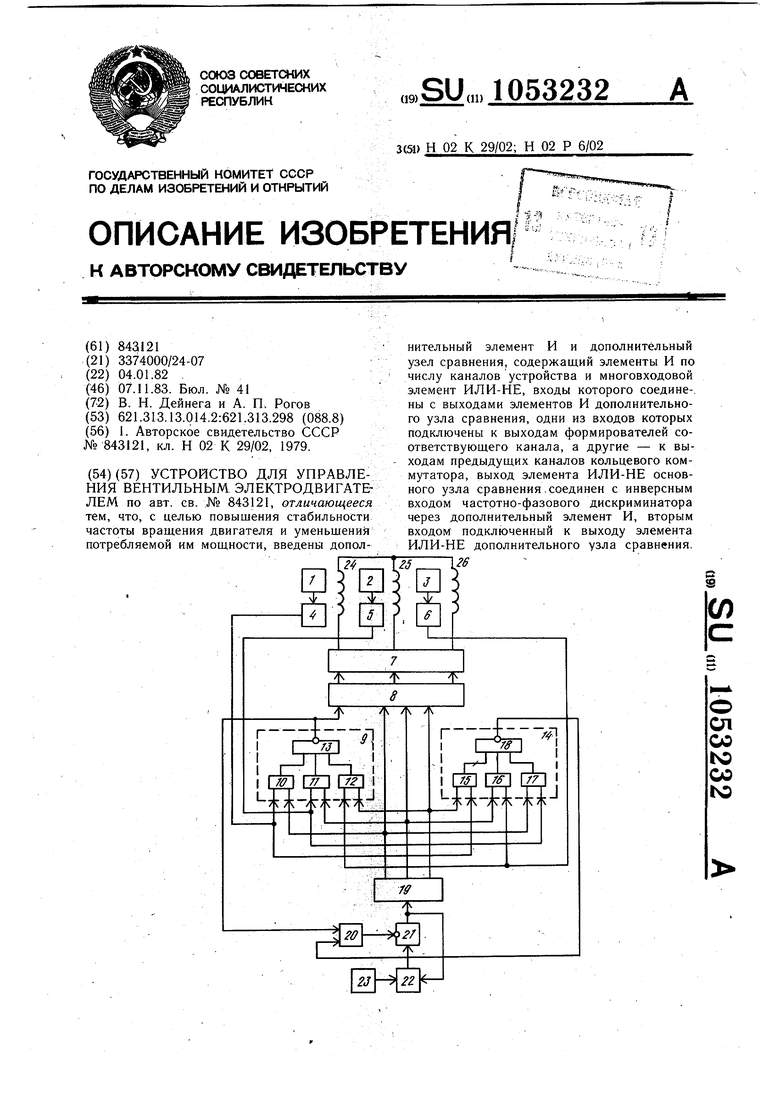
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления вентильнымэлЕКТРОдВигАТЕлЕМ | 1979 |
|
SU843121A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
