СО
со
Oi О5
Изобретение относится к подъемно-транс портному оборудованию, а именно к подвесным конвейерам, и может быть использовано для улавливания кареток подвесного конвейера на наклонных участках ходового пути при обрыве тяговой цепи.
Известен ловитель кареток подвесного конвейера, содержащий захватный механизм в виде шарнирно установленных на наклонных участках пути двух пар рычагов и датчик обрыва тяговой цепи с подвижной рамкой 1.
Однако эта конструкция характеризуется большой инерционностью и как следствие недостаточно быстрым срабатыванием ловителя при обрыве тяговой цепи, что ведет к значительным ударам при улавливании кареток.
Наиболее близким техническим решением к изобретению является ловитель, содержащий захватный механизм в виде шарнирно установленных рычагов, электромагнит и датчик обрыва тяговой цепи 2.
Однако в данном устройстве ненадежно в работе выключающее устройство, так как для раздвижки шарнирно соединенных полос может не хватить усилия звеньев тяговой цепи при ее обрыве. Ненадежно и зацепление стопорных рычагов с тяговой цепью.
Целью изобретения является упрощение конструкции с одновременным увеличением надежности работы ловителя на наклонных участках подвесного конвейера.
Цель достигается тем, что у ловителя кареток подвесного конвейера, содержащего захватный механизм в виде щарнирно установленных на наклонных участках ходового пути двух пар рычагов, электромагнит и датчик обрыва тяговой цепи с подвижной рамкой, последний выполнен в виде двух шин в цепи питания электромагнита, а рычаги установлены с возможностью взаимодействия с подвижной рамкой, причем последняя соединена с якорем электромагнита.
Кроме того, шины в цепи питания электромагнита установлены по всей длине наклонного участка ходового пути по обе стороны тяговой цепи.
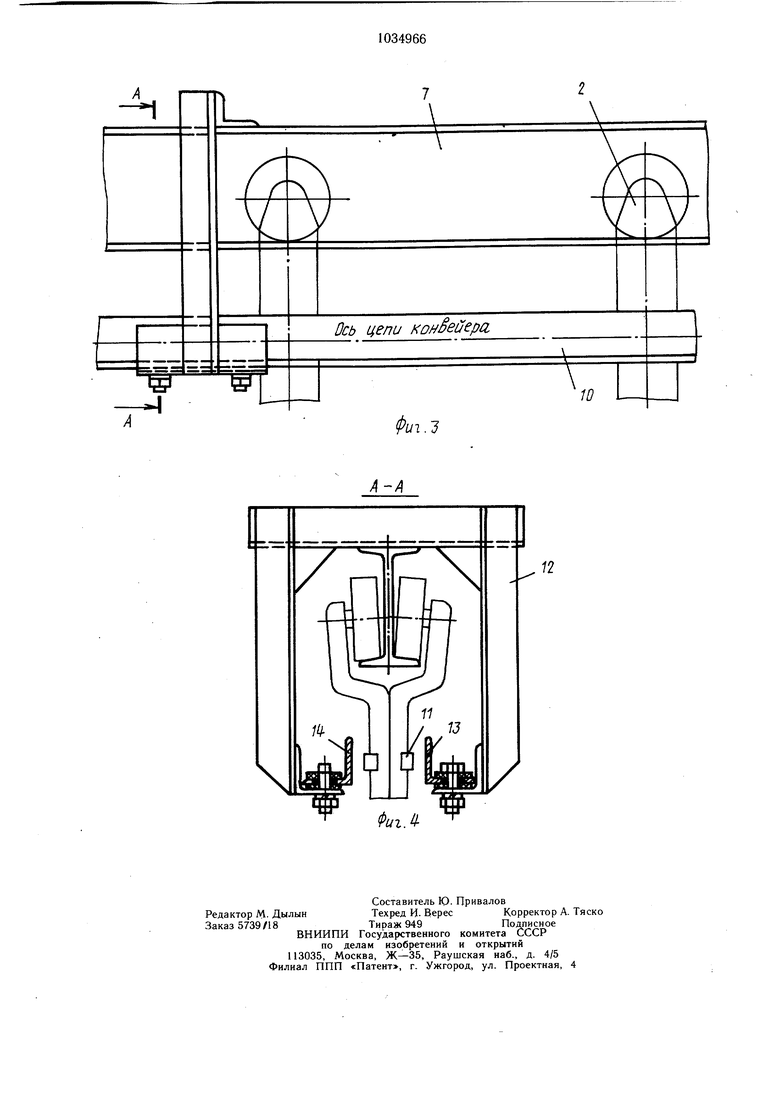
На фиг. 1 изображен ловитель, вид сбоку; на фиг. 2 - то же, вид в плане; на фиг. 3 - узел крепления шин датчика обрыва цепи; на фиг. 4 - разрез А-А на фиг. 3.
Ловитель 1 кареток 2 подвесного конвейера 3 содержит захватный механизм 4, состоящий из двух пар рычагов 5, шарнирно установленных на верхней полке 6 наклон
ных участков ходового пути 7 на осях 8. Там же расположен электромагнит 9. Датчик обрыва 10 установлен по обе стороны тяговой цепи 11 на кронщтейнах 12, закрепленных на ходовом пути 7, и выполнен в виде двух шин 13 и 14 в цепи питания электромагнита 9. Рычаги 5 в рабочем положении застопорены подвижной рамкой 15, расположенной на верхней полке 6 ходового пути 7, которая соединена скобой 16 с якорем электромагнита 9. Цод верхней полкой 6 установлены упоры 17 рычагов 5.
Ловитель работает следующим образом.
При обрыве тяговой цепи 11 конвейера 3 происходит рьшок, вследствие чего натяжение цепи 11 ослаблевает и она замыкает шины 13 и 14 электрической цепи питания электромагнита 9. Электромагнит 9 передвигает рамку 15, тем самым освобождает рычаги 5, которые под собственным весом поворачиваются на осях 8 до упоров 17, преграждая путь кареткам 2. Цри замыкании шин 13 и 14 одновременно с включением электромагнита 9 отключается привод движения конвейера (не показан).
Расстояние между рычагами ловителя выбирается некратным шагу кареток, что
уменьшает свободный пробег кареток при обрыве тяговой цепи.
Мгновенность срабатывания ловителя обеспечивает повышение надежности захвата скатывающихся кареток при обрыве
тягового органа конвейера, а отсутствие перемещающихся деталей - простоту устройства.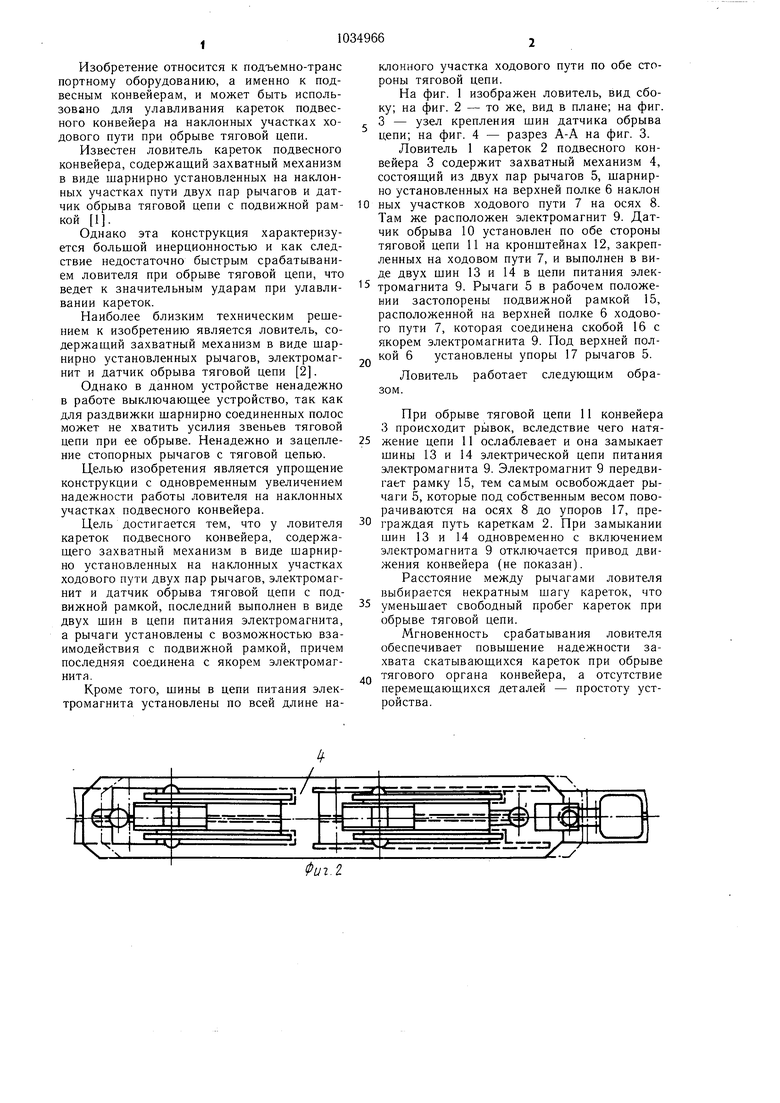
| название | год | авторы | номер документа |
|---|---|---|---|
| Ловитель кареток на наклонных участках подвесного конвейера | 1983 |
|
SU1129149A1 |
| Ловитель тягового органа конвейера | 1974 |
|
SU516589A1 |
| Устройство для улавливания тягового органа конвейера при его обрыве | 1982 |
|
SU1043081A1 |
| Ловитель | 1987 |
|
SU1419973A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Ловитель кареток подвесного конвейерапРи ОбРыВЕ ТягОВОгО ОРгАНА | 1979 |
|
SU835903A1 |
| Ловитель кареток на спуске подвесного конвейера | 1984 |
|
SU1217745A1 |
| ЯАТЕНТНО- -^'" | 1970 |
|
SU261986A1 |
| Приспособление для крепления птицы на подвесном конвейере | 1960 |
|
SU136525A1 |
| Устройство для улавливания кареток на спуске подвесного конвейера | 1983 |
|
SU1104077A1 |
1. ЛОВИТЕЛЬ КАРЕТОК ПОДВЕСНОГО КОНВЕЙЕРА, содержащий захватный механизм в виде шарнирно установленных на наклонных участках ходового пути двух пар рычагов, электромагнит и датчик обрыва тяговой цепи с подвижной рамкой, отличающийся тем, что, с целью упрощения конструкции и увеличения надежности работы ловителя, датчик обрыва выполнен в виде двух шин в цепи питания электромагнита, а рычаги установлены с возможностью взаимодействия с подвижной рамкой, причем последняя жестко соединена с якорем электромагнита. 2. Ловитель кареток по п. 1, отличающийся тем, что шины в цепи питания электромагнита установлены по всей длине наклонного участка ходового пути по обе стороны тяговой цепи.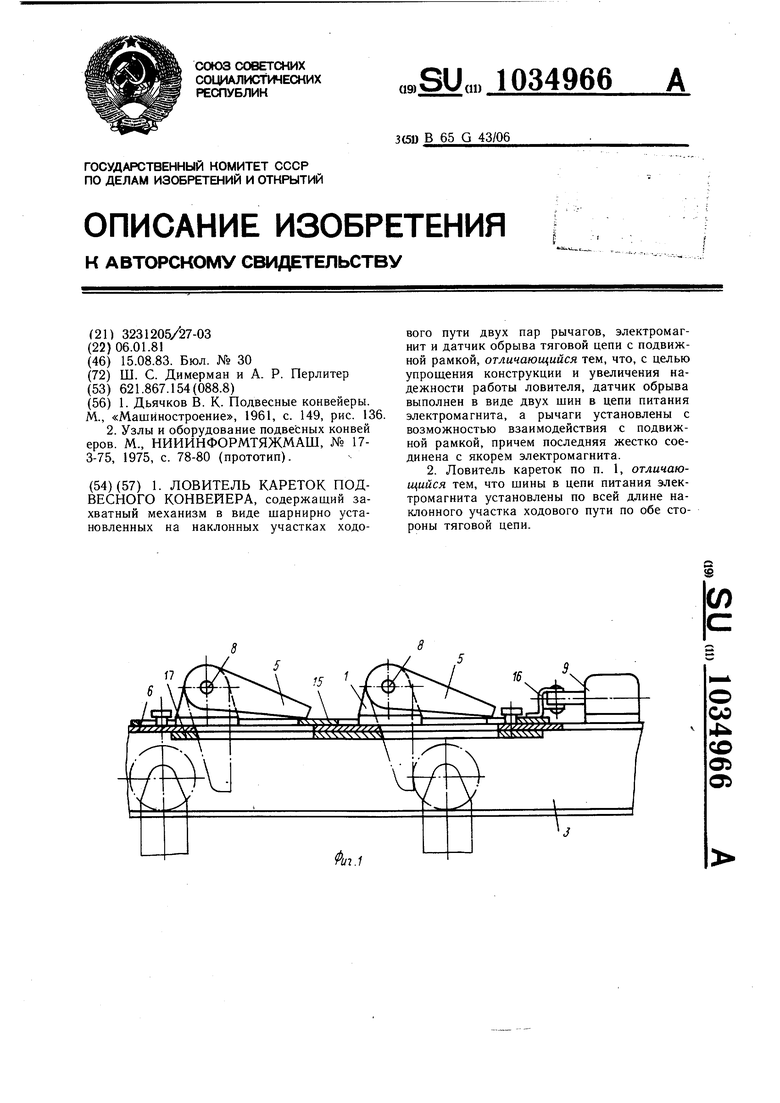
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Дьячков В | |||
| К | |||
| Подвесные конвейеры | |||
| М., «Машиностроение, 1961, с | |||
| Подъемник для выгрузки и нагрузки барж сплавными бревнами, дровами и т.п. | 1919 |
|
SU149A1 |
| Регулятор для ветряного двигателя в ветроэлектрических установках | 1921 |
|
SU136A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Узлы и оборудование подвесных конвей еров | |||
| М., НИИИНФОРМТЯЖМАШ, № 173-75, 1975, с | |||
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
