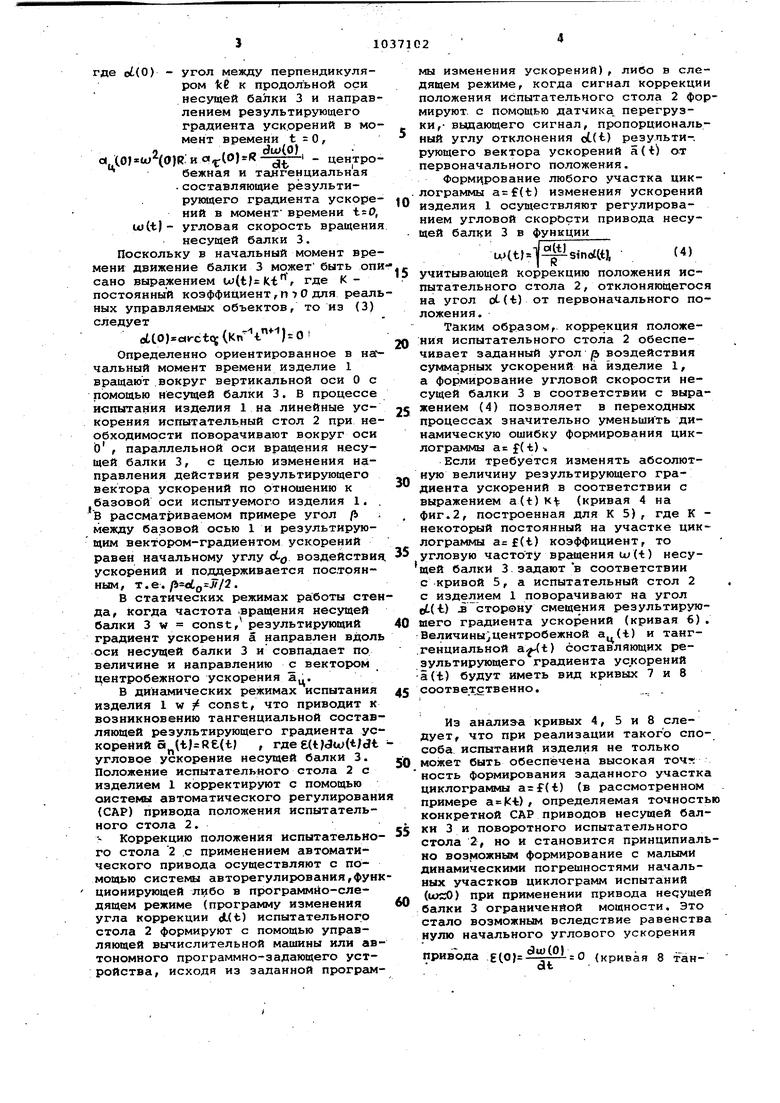
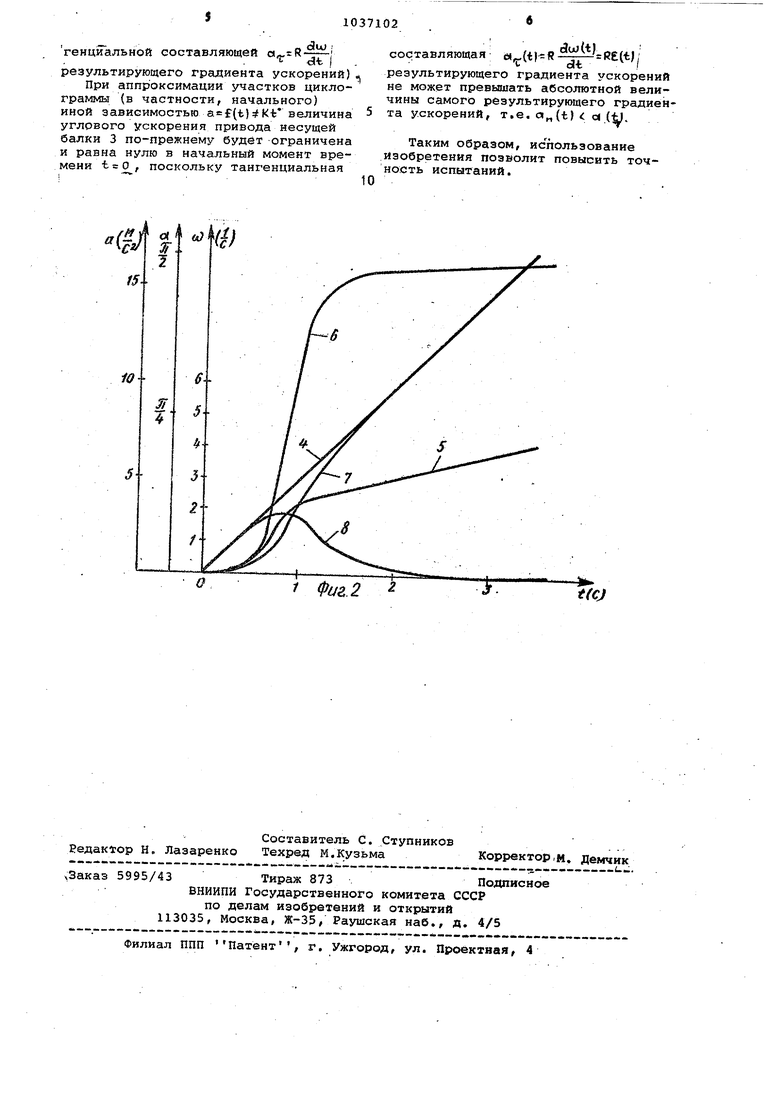
Изобретение относится к динамиче ким испытаниям изделий, а именно к способам испытаний изделий на возде ствие линейных ускорений. Известен способ испытаний издели на воздействие линейных ускорений, заключающийся в том, что несущую )- с установленным на ней столом с испытуемым изделием вращают в гор зонтальной плоскости, .поворачивают процессе испытаний стол с изделием вокруг оси, параллельной оси вращения несущей балки на угол, определя мый требуемым направлением результи рующих ускорений на изделие относительно его базовой оси, и в случае возникновения тангенциальных ускоре НИИ корректируют угол поворота стол . Этот способ позволяет обеспечить - высокую точность ориентации изделий в пространстве относительно результирующего градиента ускорений (вектора, являющегося геометрической суммой векторов центробежного и обратного тангенциальному ускорений) Однако в переходных режимах, свя занных с изменением во времени уско рений изделия, не устраняет динами(ческую погрешность формирования абсолютной величины результирующего градиента ускорений. Это связано с тем, что система авторегулирования .Частоты вращения несущей балки обес пёчивает формирование заданной абсо лютной величины результирующего гра диента ускорений только в статических режимах (при постоянной частоте .вращения несущей балки), когда абсолютная величина результирующего градиента ускорений a(i.) равна абсолютной величине центробежного ускорен.ия изделия а„ (t) , т.е. /ajt)/ /6(j(l)/ u;2(,jR (1) где u(t) - частота вращения несущей балки; R - радиус вращения изделия. При динамических испытаниях изде лия, когда dtu/dt/0, коррекция положения испытательного стола вследствие возникновения тангенциального ускорения .(a,j;-(t) приводит к двум противоположным по производимому эффекту процессам: процессу ликвида ции ошибки ориентирования и.зделия в пространстве по отношению к изменяю щемуся результирующему вектору-градиенту ускорений и процессу возникновения динамической ошибки /(-thfoi(t)rt {t|-c,(th«(t)-a(t| (t) в начальные моменты формирования произвольного участка циклограммы динамических испытаний. Цель изобретения - повьпаение точ ности испытаний.. Эта цель достигается тем, что согласно способу испытаний изделий на воздействие линейных ускорений, заключающемуся в том, что несущую балку с установленным на ней столом с испытуемым .изделием вращают в горизонтальной плоскости, поворачивают в процессе испытаний стол с изделием относительно оси, параллельной оси вращения несущей балки на угол,определяемый требуемым направлением результирующих ускорений на изделие относительно его базовой оси, и в случае возникновений тангенциальных ускорений корректируют угол поворота стола, перед вращением балки стол с изделием устанавливают в таком положении, при котором базовая ось изделия составляет с нормалью к продольной оси несущей балки -заданный начальный угол воздействия линейных ускорений, а закон изменения угловой скорости вращения балки корректиру-. ется в функции текущего угла поворота стола относительно его первоначального положения. На фиг.1 изображен центробежный испытательный стенд с действующими на испытуемое изделие составляющими результирующего градиента ускорений, общий вид; на фиг.2 - кривые зависимостей частоты вращения несущей балки угла поворота испытательного стенда, абсолютной величины результирующего градиента ускорений и его составляющих в функции времени. Перед испытанием изделие 1 устанавливают на испытательном столе 2 так, чтобы его ось mn (базовая ось) составила с перпендикуляром .к продольной оси несущей балки 3 заданный начальный угол ot воздействий линейных ускорений (в рассматриваемом примере (, т.е. направление действия линейных ускорений в начальный момент времени принято перпендикулярным к базовой оси изделия 1, начальное положение изделия изображено пунктиром (на фиг.1). Указанная определенность в первоначальной ориентации изделия 1 относительно перпендикуляра к продольной оси несущей балки 3 означает, что в начальный момент приведения несущей балки 3 во вращение на изделие 1 действует только составляющая результирующего градиента ускорений, вызванная тангенциальным ускорением, т.е. результирующий вектор ускорений в начальный момент времени t О перпендикулярен продольной оси несущей балки 3 и направлен в сторону, противоположную направлению вращени несущей балки 3. Действительно, независимо от требуемого закона изменения абсолютной величины результирующего градиента ускорений,справедливо соотношение oi(0)-c,rc4 Ofw , О) где ci(0) - угол между перпендикуляром 1с к продольной оси несущей балки 3 и направ лением результирующего градиента ускорений в мо мент времени t О, 9 . I. л du(0j t.(0)R ) центро бежная и талгенциальная .составляющие результирующего градиента ускоре ний в момент времени t 0 U)(t)- угловая скорость вращени несущей балки 3. Поскольку в начальный момент вре мени движение балки 3 может быть оп сано выражением w( где К постоянный коэффициент ,п О для реал ных управляемых объектов, то из (3) следует ..о o(,tO)cii-ctC5(Kn t Определенно ориентированное в Haf чальный момент времени изделие 1 вращают.вокруг вертикальной оси О с помощью несущей балки 3. В процессе испытания изделия 1 на линейные ускорения испытательный стол 2 при не обходимости поворачивают вокруг оси О , параллельной оси вращения несущей балки 3, с целью изменения направления действия результирующего вектора ускорений по отношению к базовой оси испытуемого изделия 1. В рассматриваемом примере угол /i между базовой осью 1 и результирующим вектором-градиентом ускорений равен начальному углу d-Q воздействи ускорений и поддерживается постоянным, т.е./J). В статических режимах работы сте да, когда частота -вращения несущей балки 3 W const/ результирующий градиент ускорения а направлен вдол оси несущей балки 3 и совпадает по величине и направлению с вектором центробежного ускорения Жц. В динэ1мических режимах испытания изделия 1 W J const, что приводит к возникновению тангенциальной состав ляющей результирующего градиента ус корений a((t , гдеб(4М(/«3 угловое ускорение несущей балки 3. Положение испытательного стола 2 с изделием 1 корректируют с помощью системы автоматического регулировани (САР) привода положения испытательного стола 2. Коррекцию положения испытательного стола 2 .с применением автоматического привода осуществляют с помощью системы авторегулирования,функ ционирующей либо в программйо-следящем режиме (программу изменения угла коррекции i.(t) испытательного стола 2 формируют с помощью управляющей вычислительной машины или автономного программно-задающего устройства, исходя из заданной программы изменения ускорений), либо в следящем режиме, когда сигнал коррекции положения испытательного стола 2 формируют, с помощью датчика, перегрузки,- выдающего сигнал, пропорциональный углу отклонения ot(t) резупьти-, рующего вектора ускорений а(t) от первоначального положения. Формирование любого участка циклограммы a(t) изменения ускорений изделия 1 осуществляют регулированием угловой скорости привода несущей балки 3 в функции u,(t)sinrfWi (4) учитывающей коррекцию положения испытательного стола 2, отклоняющегося на угол {)(-(:) от первоначального положения. таким образом, коррекция положения испытательного стола 2 обеспечивает заданный угол р воздействия суммарных ускорений на изделие 1, а формирование угловой скорости несущей балки 3 в соответствии с выражением (4) позволяет в переходных процессах значительно уменьшить динамическую ошибку формирования циклограммы )ч Если требуется изменять абсолютную величину результирующего градиента ускорений в соответствии с выражением a(t) к (кривая 4 на фиг.2, построенная для К 5), где К некоторллй постоянный на участке циклограммы а(t) коэффициент, то угловую частоту вращения lo(-t) несущей балки 3. задаютв соответствии с кривой 5, а испытательный стол 2 с изделием 1 поворачивают на угол (/.(t) J сторону смещения результирующего градиента ускорений (кривая 6). Величины}центробежной а (t) и танггенциальной a:(t) составляющих результирующего градиента ускорений i(t) будут иметь вид кривых 7 и 8 соответственно. Из анализа кривых 4, 5 и 8 следует, что при реализации такого способа испытаний изделия не только может быть обеспечена высокая точ ность формирования заданного участка циклограммы ) (в рассмотренном примере ), определяемая точностью конкретной САР приводов несущей балки 3 и поворотного испытательного стола 2, но и становится принципиально возможным формирование с малыми динамическими погрешностями начальных участков циклограмм испытаний (шгО) при применении привода несущей балки 3 ограниченйой мощности. Это стало возможным вследствие равенства нулю начального углового ускорения привода Е(о. (кривая 8 анаЪгенциальной составляющей °t 5r | результирующего градиента ускорений) При аппроксимации участков циклограммы (в частности, начального) иной зависимостью (t)Ki: величина углового ускорения привода несущей балки 3 по-прежнему будет ограничена и равна нулю в начальный момент времени t 0, поскольку тангенциальная ()/ составляющая результирующего градиента ускорений не может превышать абсолютной величины самого результирующего градиента ускорений, т.е. «„(t) d (t). Таким образом, использование изобретения позволит повысить точность испытаний.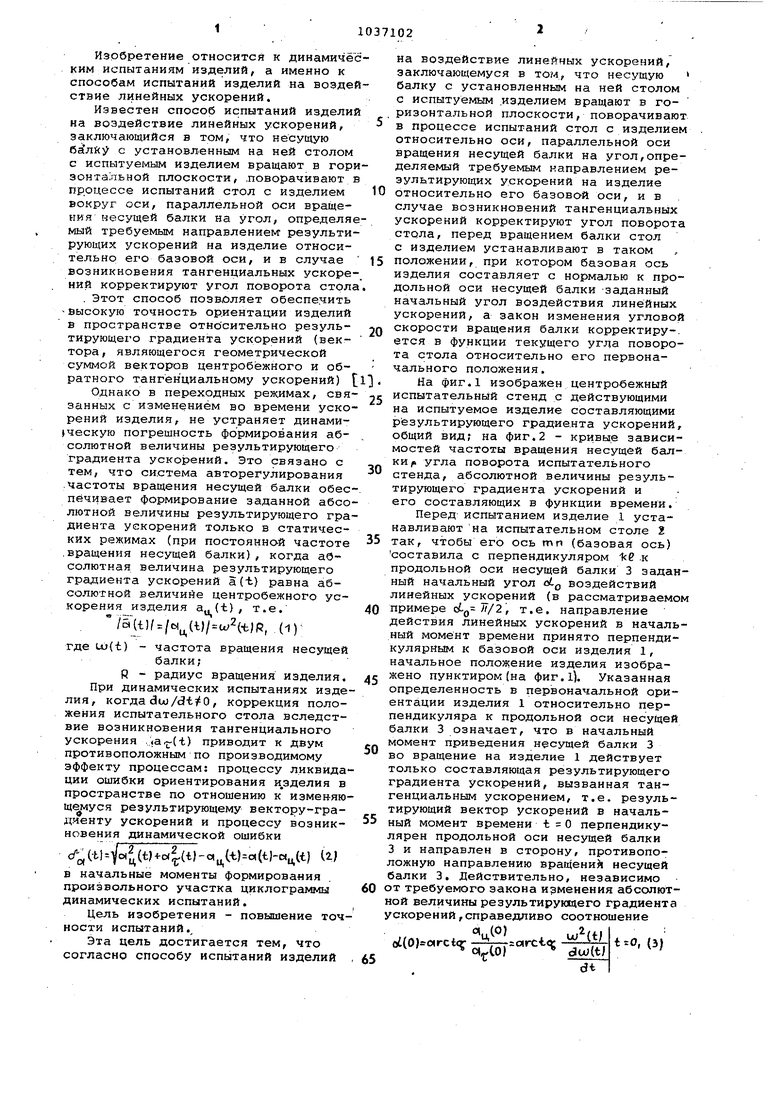
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания изделий на воздействие переменных ускорений | 1990 |
|
SU1789936A1 |
| Стенд для динамических испытаний изделий | 1990 |
|
SU1791743A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ ПРИ ИСПЫТАНИЯХ НА УДАРНЫЕ И ВИБРАЦИОННЫЕ ВОЗДЕЙСТВИЯ | 2013 |
|
RU2545489C1 |
| Стенд для динамических испытаний изделий | 1989 |
|
SU1716353A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОДЕЛИ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЙ АКСЕЛЕРОМЕТРОВ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИИ | 2012 |
|
RU2504734C1 |
| Стенд для динамических испытаний изделий на воздействие переменных ускорений | 1990 |
|
SU1720025A1 |
| Стенд для динамических испытаний изделий | 1990 |
|
SU1781579A1 |
| ЦЕНТРОБЕЖНЫЙ СТЕНД ДЛЯ ИСПЫТАНИЯ ИЗДЕЛИЙ НА ПЕРЕГРУЗКИ | 1972 |
|
SU334499A1 |
| Испытательный комплекс | 1984 |
|
SU1224731A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2010 |
|
RU2424954C1 |
СПОСОБ ИСПЫТАНИЙ ИЗДЕЛИЙ Н ВОЗДЕЙСТВИЕ ЛИНЕЙНЫХ УСКОРЕНИЙ, зак л)очаю1цийся в том, что несущую балку С установленным на ней столом с испытуемьм изделием вращают в гдри;зомтальной плоскости, поворачивают в процессе испытаний стол с изделие относительно оси, параллельной оси вращения несущей балки на угол, опрёделаемый требуемым направлением ре.зультирующих ускорений на изделие относительно его базовой оси, и в слуыае возникновения тангенциальных .ускорений корректируют угол поворота стола, отличающийся тем, что, с целью повышения точности испытаний, перед вращением балки стол с изделием устанавливают в таком положении, при котором базовая ось изделия с но1 1алью к продольной оси несущей балки заданный начальный угол воздействия линейных ускорений, а закон изменеирия угловой скорости вращения балки корректируется в функции текущего поворота стола относительно его первоначального положения .
6
.2
t(c)
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
