Предлагаемое изобретение относится к области, связанной с управлением движением разгонного блока (РБ) при выведении его на опорную орбиту после отделения от ракеты-носителя (РН).
Наиболее близким техническим решением является способ управления РБ, в котором после отделения РБ от РН выполняют разворот РБ по тангажу и рысканию до достижения ориентации, определяемой заданными в полетном задании (ПЗ) начальными значениями углов тангажа (ϑпр) и рысканья (ψпр) в программе изменения ориентации на доразгоне, стабилизируют продольную ось РБ в этой ориентации до момента начала отработки заданной программы ориентации по тангажу и рысканию с заданными в ПЗ скоростями их изменения рыскания ( ,
,  ), считывают из полетного задания (ПЗ) данные по параметрам управления и формируемой на доразгоне орбите РБ, в заданные в ПЗ времена от момента отделения РБ от РН включают на оговоренный в ПЗ интервал времени двигатели коррекции импульса (ДКИ) для поджатия топлива в баках РБ, запускают маршевый двигатель (МД), спустя фиксированный момент времени после запуска МД начинают отработку заданной в ПЗ программы ориентации РБ по тангажу и рысканию, корректируют программу ориентации с помощью терминального управления и выключают МД по достижении заданного функционала энергии [1].
), считывают из полетного задания (ПЗ) данные по параметрам управления и формируемой на доразгоне орбите РБ, в заданные в ПЗ времена от момента отделения РБ от РН включают на оговоренный в ПЗ интервал времени двигатели коррекции импульса (ДКИ) для поджатия топлива в баках РБ, запускают маршевый двигатель (МД), спустя фиксированный момент времени после запуска МД начинают отработку заданной в ПЗ программы ориентации РБ по тангажу и рысканию, корректируют программу ориентации с помощью терминального управления и выключают МД по достижении заданного функционала энергии [1].
При таком способе управления предполагается, что плоскость формируемой опорной орбиты совпадает с плоскостью полета РН, маневрирования за счет изменения рыскания не требуется и поэтому параметры программы ориентации по рысканию (
 ) задаются в ПЗ равными нулю.
) задаются в ПЗ равными нулю.
Недостатком такого способа управления является тот факт, что заданные в ПЗ параметры программы ориентации РБ после отделения от РН рассчитываются при баллистической подготовке к полету для номинальных условий. Начальные условия на этом участке зависят от точности приведения РН разгонного блока в точку его отделения. Из-за несоответствия заданной в ПЗ программы ориентации конкретным условиям полета направление действия тяги ДКИ при поджатии топлива и тяги МД до начала терминального управления не совпадает с требуемым. Это приводит к тому, что тратится время на изменение ориентации тяги МД, необходимой для формирования требуемых параметров орбиты на участке доразгона, увеличивается длительность процесса формирования этой орбиты и повышается расход топлива на маневре. Коррекция ориентации РБ выполняется с помощью терминального управления. Объем этих корректировок и определяет дополнительный расход топлива на выполнение маневра.
Техническим результатом изобретения является снижение энергетических затрат РБ на доразгоне путем корректировки после отделения от РН программы ориентации РБ по тангажу и рысканию в соответствии со сложившимися условиями полета и стабилизации РБ относительно откорректированной программы до подключения терминального управления.
Указанный технический результат достигается тем, что в известный способ управления движением РБ на участке доразгона, заключающийся в том, что после отделения РБ от РН стабилизируют продольную ось РБ относительно ее направления на момент отделения от РН, считывают из ПЗ данные по параметрам управления и формируемой на доразгоне орбите РБ, в заданные в ПЗ времена от момента отделения РБ от РН включают на оговоренный в ПЗ интервал времени ДКИ для поджатия топлива в баках, запускают МД, спустя фиксированный момент времени после запуска МД начинают отработку программы ориентации РБ по тангажу и рысканию, корректируют программу ориентации с помощью терминального управления, выключают МД по достижении заданного функционала энергии и за установленный интервал времени до этого фиксируют программу ориентации, дополнительно после отделения РБ от РН выполняют прогноз движения на четырех последовательных временных участках, в число которых входят пассивный участок от момента отделения от РН до заданного в ПЗ момента включения ДКИ для поджатия топлива, интервал времени от включения ДКИ до включения МД, участок от момента запуска МД до начала изменения программы ориентации РБ, интервал времени от начала изменения программы ориентации РБ до достижения функционалом энергии заданного в ПЗ значения, определяют на момент достижения заданного функционала энергии отклонения от заданной орбиты по радиусу, радиальной скорости, отклонение по нормали к плоскости орбиты и скорость изменения этого отклонения, вычисляют чувствительность этих отклонений к изменению начальных углов программы ориентации, вычисленных на момент запуска МД, и чувствительность этих параметров к скорости изменения углов тангажа и рыскания, определенных на момент начала изменения программы ориентации, вычисляют корректирующие поправки к программе ориентации в каналах управления по углам тангажа, рыскания и скоростям их изменения, определяют новые откорректированные значения параметров программы ориентации и выполняют разворот РБ по тангажу и рысканию до достижения ориентации, определяемой их уточненными начальными значениями, и на этом направлении стабилизируют продольную ось РБ до момента начала отработки откорректированной программы ориентации.
На фиг.1 и фиг.2 представлены соответственно циклограммы управления движением РБ по способу-прототипу и по предлагаемому способу на участке доразгона, на фиг.3 показана ориентация формируемой орбиты и отклонение по радиусу от заданной орбиты, на фиг.4 и фиг.5 представлены соответственно графики переходных процессов изменения программных углов тангажа ϑпр и рыскания ψпр при управлении по способу-прототипу и по предлагаемому способу на участке доразгона при отличных от номинала условиях.
Предложенный способ управления продольным движением РБ на участке доразгона реализован следующим образом.
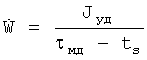
В циклограмме на фиг.1 (способ-прототип) после поступления команды об отделении РБ от РН (ТКО) РБ разворачивается и стабилизируется относительно заданных в ПЗ начальных значений программных углов тангажа ϑпр и рыскания ψпр (на циклограмме показано изменение только ϑпр). ДКИ для поджатия топлива включаются перед запуском МД. Длительность работы ДКИ (ТДКИ), момент включения МД (Твкл) и расчетное время отключения МД (Твыкл) задаются в ПЗ. В установленные времена после запуска МД начинается отработка программы ориентации РБ (Тпр) и подключается терминальное управление (ТТУ) с тактом работы ΔТупр. МД выключается при достижении заданного функционала энергии (Твыкл).
На фиг.2 представлена циклограмма управления на участке доразгона по предлагаемому способу. Она отличается от циклограммы способа-прототипа на фиг.1 тем, что после отделения от ракеты-носителя РБ разворачивается и стабилизируется не относительно заданных в ПЗ начальных значений программных углов тангажа ϑпр и рыскания ψпр, а относительно их значений, откорректированных для сложившихся условий движения РБ в этот момент. С учетом этих условий пересчитываются и скорости отработки программы ориентации ( ,
,  ).
).
На фиг.3 показана ориентация формируемой орбиты и отклонение по радиусу от заданной орбиты.
На фиг.4 представлены графики переходных процессов изменения программных углов тангажа ϑ и рыскания ψ при управлении по способу-прототипу на участке доразгона при отличных от номинала условиях.
На фиг.5 представлены графики тех же переходных процессов с пересчетом после отделения от РН параметров программы ориентации РБ ϑпр, ψпр, , 
Для учета начальных условий на доразгоне и коррекции параметров программы ориентации последовательно выполняются следующие операции:
- расчет прогноза движения РБ с заданной в ПЗ программой ориентации от момента отделения от РН до выключения МД при достижении заданного функционала энергии;
- определение отклонений от заданной опорной орбиты в прогнозируемый момент выключения МД;
- определение функций чувствительности по углам тангажа и рыскания на момент включения МД и функций чувствительности по угловым скоростям изменения углов тангажа и рыскания на момент начала изменения программы ориентации (через время Тпр после запуска МД);
- определение поправок к параметрам программы ориентации и их корректировка.
Для выполнения поставленной задачи используются следующие системы координат.
Гринвичская геоцентрическая инерциальная система координат (ГИСК) имеет начало координат в центре Земли, ось ОХГ находится в плоскости нулевого меридиана и направлена в точку его пересечения с экватором, ось OZГ направлена на Северный полюс, а ось OYГ образует правую систему координат. Положение ГИСК замораживается в момент старта РН с РБ.
Геоцентрическая инерциальная система координат выведения (ИСКВ) определяется при баллистической подготовке пуска по параметрам движения в начальной точке номинальной (расчетной) траектории каждого активного участка. Ось ОУВ ИСКВ направлена из центра Земли в выбранную точку расчетной траектории полета РБ, ось ОХВ перпендикулярна оси OYВ и направлена в расчетном направлении движения, а ось OZB дополняет систему координат до правой. Ориентация ИСКВ относительно ГИСК определяется матрицей перехода σми, элементы которой задаются в ПЗ.
Геометрия заданной орбиты на участке доразгона определяется значениями эксцентриситета ех и фокальным параметром Fp, а ее ориентация в пространстве относительно ГИСК - векторами  ,
,  ,
,  .
.
Начало векторов  ,
,  ,
,  находится в центре Земли, вектор проходит через апогей орбиты, вектор перпендикулярен плоскости орбиты, вектор образует правую систему координат (фиг.3). Проекции векторов , , на оси ГИСК образуют матрицу, элементы которой и параметры ех, Fp задаются в ПЗ.
находится в центре Земли, вектор проходит через апогей орбиты, вектор перпендикулярен плоскости орбиты, вектор образует правую систему координат (фиг.3). Проекции векторов , , на оси ГИСК образуют матрицу, элементы которой и параметры ех, Fp задаются в ПЗ.
Программа ориентации РБ задается в ИСКВ и имеет линейный во времени вид:


где время t отсчитывается от начала отработки программ ориентации РБ, то есть через время Тпр после запуска МД.
В качестве модели прогноза траекторного движения РБ с работающим МД используется система дифференциальных уравнений:
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
ts=t-t0,
где
 ,
,  - радиус-вектор центра масс РБ и вектор абсолютной скорости РБ;
- радиус-вектор центра масс РБ и вектор абсолютной скорости РБ;
 ,
,  - единичный вектор тяги в ГИСК и ИСКВ соответственно;
- единичный вектор тяги в ГИСК и ИСКВ соответственно;
 - матрица перехода от системы координат выведения (ИСКВ) к ГИСК;
- матрица перехода от системы координат выведения (ИСКВ) к ГИСК;
 - вектор гравитационного ускорения;
- вектор гравитационного ускорения;
В0, В2, В4 - параметры, определяющие модель нормального гравитационного поля Земли;
gr, g0 - поправки, учитывающие 2-ю и 4-ю зональные гармоники Земли;
 - кажущееся ускорение;
- кажущееся ускорение;
Jуд - удельный импульс МД или ДКИ в пустоте в зависимости от используемой двигательной установки;
t - текущее время;
t0 - время начала прогноза;
τмд - задаваемое в ПЗ условное время полного сгорания массы РБ при работе МД.
Вектор  имеет вид:
имеет вид:
 ,
,
где  и ϑ - углы рыскания и тангажа программы ориентации РБ относительно ИСКВ.
и ϑ - углы рыскания и тангажа программы ориентации РБ относительно ИСКВ.
Прогноз параметров движения РБ на момент отсечки МД ( и
и  ) относительно ГИСК осуществляется путем численного интегрирования уравнений модели движения методом Рунге-Кутта четвертого порядка точности. Начальные значения по параметрам
) относительно ГИСК осуществляется путем численного интегрирования уравнений модели движения методом Рунге-Кутта четвертого порядка точности. Начальные значения по параметрам  ,
,  определяются по информации, поступающей из навигационной системы.
определяются по информации, поступающей из навигационной системы.
Для выполнения прогноза траектория движения РБ разбивается на четыре временных участка:
- участок от момента отделения РБ от РН до момента включения ДКИ для поджатия топлива;
- участок от момента включения ДКИ до их отключения в момент запуска МД;
- участок от запуска МД до момента начала отработки программы ориентации РБ (время Тпр после запуска МД);
- участок от начала отработки программы ориентации до момента выключения МД при достижении заданного функционала энергии.
Для каждого участка время t0 принимается равным времени начала участка.
На первом участке выполняется пассивный полет и в интегрируемой системе кажущееся ускорение  равно нулю. Так как этот участок небольшой продолжительности, то шаг интегрирования Н принимается равным его продолжительности.
равно нулю. Так как этот участок небольшой продолжительности, то шаг интегрирования Н принимается равным его продолжительности.
На втором участке кажущееся ускорение  возникает за счет тяг ДКИ. Поэтому в интегрируемой системе константы Jуд и τмд необходимо заменить на величины, соответствующие ДКИ. Условное время полного сгорания массы РБ τ соответствует отношению начальной массы РБ к секундному расходу используемой двигательной установки. Поэтому
возникает за счет тяг ДКИ. Поэтому в интегрируемой системе константы Jуд и τмд необходимо заменить на величины, соответствующие ДКИ. Условное время полного сгорания массы РБ τ соответствует отношению начальной массы РБ к секундному расходу используемой двигательной установки. Поэтому

где  и
и  - расчетные значения секундных расходов топлива ДКИ и МД. Шаг интегрирования Н на этом участке принимается равным длительности поджатия топлива, а ориентация РБ определяется начальными углами программы ориентации ϑ=ϑпр, ψ=ψпр.
- расчетные значения секундных расходов топлива ДКИ и МД. Шаг интегрирования Н на этом участке принимается равным длительности поджатия топлива, а ориентация РБ определяется начальными углами программы ориентации ϑ=ϑпр, ψ=ψпр.
На третьем и четвертом участках кажущееся ускорение  возникает за счет тяги МД. На третьем участке сохраняется ориентация второго участка, а шаг интегрирования Н принимается равным Тпр - интервалу времени от запуска МД до начала отработки программ ориентации.
возникает за счет тяги МД. На третьем участке сохраняется ориентация второго участка, а шаг интегрирования Н принимается равным Тпр - интервалу времени от запуска МД до начала отработки программ ориентации.
На четвертом участке отрабатываются программы ориентации (1) и (2). Так как продолжительность работы МД на этом участке может быть значительной, то для получения высокой точности определения момента выключения МД величина шага интегрирования Н на четвертом участке изменяется в процессе счета, а начальное значение Н определяется предварительно заданным числом шагов интегрирования Nпр:
Н=(Твыкл-Твкл-Тпр)/Nпр,
где время ТВЫКЛ принимается равным расчетному моменту отсечки МД, определенному при баллистической подготовке полета и внесенному в ПЗ.
Для повышения быстродействия решения задачи в бортовой цифровой вычислительной машине (БЦВМ) число шагов интегрирования принято равным Nпр=10. Для сокращения объема вычислений на первых 7 шагах интегрирования выполняется прогноз параметров движения РБ  ,
,  в эти моменты. Прогноз времени отсечки МД начинается после 7 шагов интегрирования из намеченных первоначально 10 шагов. Этот момент выбран с учетом возможного отклонения параметров движения от их номинальных значений и их влияния на прогнозируемое время отсечки МД Твыкл.
в эти моменты. Прогноз времени отсечки МД начинается после 7 шагов интегрирования из намеченных первоначально 10 шагов. Этот момент выбран с учетом возможного отклонения параметров движения от их номинальных значений и их влияния на прогнозируемое время отсечки МД Твыкл.
Время отсечки МД Твыкл определяется прогнозируемым моментом достижения функционалом энергии F заданного в ПЗ значения на доразгоне FК. Функционал энергии вычисляется по формуле:
 ,
,
где В0 - гравитационная постоянная (3.9860044е14 м3/с2);
 ,
,  - радиус-вектор и вектор скорости после очередного шага интегрирования в задаче прогноза.
- радиус-вектор и вектор скорости после очередного шага интегрирования в задаче прогноза.
Время Δtf, оставшееся до достижения заданного функционала энергии FK, определяется по формуле:
 ,
,
 ,
,
где R, V - модуль радиус-вектора и вектора абсолютной скорости.
Для повышения точности прогноза при Δtf/H≤1.1 выполняется уменьшение последующих шагов интегрирования по зависимости
H=0.9·Δtf.
Требуемая точность вычисления прогнозируемого момента отсечки МД достигается, когда шаг интегрирования снизится до величины такта бортовой цифровой вычислительной машины ΔТ. Как показывают расчеты, при выбранном темпе изменения шага интегрирования при ΔT=0.032768 с общее количество шагов интегрирования в решении задачи прогноза отсечки МД будет в диапазоне i=12÷16 и прогнозируемый момент Твыкл будет определяться как
Твыкл=t0+∑Hi.
В результате интегрирования полученные на момент Твыкл параметры движения  ,
,  определяют прогнозируемые условия полета в конце доразгона. Погрешности формирования орбиты на прогнозируемый момент характеризуются отклонениями от параметров заданной орбиты:
определяют прогнозируемые условия полета в конце доразгона. Погрешности формирования орбиты на прогнозируемый момент характеризуются отклонениями от параметров заданной орбиты:
- по радиусу ΔR и радиальной скорости ΔV в плоскости орбиты;
- боковым отклонением радиуса ΔRb и скорости ΔVb по нормали к плоскости формируемой орбиты.
Для вычисления этих параметров предварительно определяются проекции X1, Х2, Х3 радиус-вектора R на направление векторов  ,
,  ,
, 
X1=R(1)·Е(1)+R(2)·Е(2)+R(3)·Е(3),
Х2=R(1)·E1(1)+R(2)·E1(2)+R(3)·E1(3),
Х3=R(1)·B(1)+R(2)·В(2)+R(3)·В(3).
В прогнозируемой точке окончания маневра угол истинной аномалии η и проекции X1, X2 (фиг.3) связаны зависимостями:
Cosη=-X1/R,
Sinη=X2/R,
где  - модуль радиус-вектора.
- модуль радиус-вектора.
С учетом этого расчетные значения радиуса Rz и радиальной скорости VRz на расчетной орбите с заданными значениями фокального параметра Fp и эксцентриситета еx для вычисленного угла η определяются по формулам:
Rz=Fp/(1-ex·Cosη),

Линейные (ΔR, ΔRb) и скоростные отклонения (ΔVb, ΔV) определяются следующим образом:
VR=(R(1)·V(1)+R(2)·V(2)+R(3)·V(3))/R - радиальная скорость,
ΔR=R-Rz,
ΔV=VR-VRz,
ΔRb=Х3,
ΔVb=V(1)·B(1)+V(2)·B(2)+V(3)·B(3).
В приведенных формулах R(i), V(i) и др. (i=1, 2, 3) представляют собой проекции этих параметров на оси ГИСК.
Функция чувствительности определяет величину изменения определенного параметра движения на малое отклонение управляющего воздействия и по существу является производной этого параметра по этому воздействию. Для решения поставленной задачи необходимо знать функции чувствительности линейных ΔR, ΔRb и скоростных ΔV, ΔVb отклонений к изменениям параметров программы ориентации РБ: ϑпр, ψпр, ,  При определении этих функций принимается, что на функции чувствительности гравитационное ускорение не влияет и изменение параметров движения относительно базовой траектории происходит только за счет изменения ориентации направления вектора тяги, вызванного малыми отклонениями управляющих воздействий вида
При определении этих функций принимается, что на функции чувствительности гравитационное ускорение не влияет и изменение параметров движения относительно базовой траектории происходит только за счет изменения ориентации направления вектора тяги, вызванного малыми отклонениями управляющих воздействий вида
 .
.
Кроме того, предполагается, что продольное и боковое движение относительно спрогнозированной траектории и соответствующие им управления незначительно влияют друг на друга, то есть перекрестные связи между каналами по отклонениям управляющих воздействий слабы и их можно считать независимыми.
При принятом допущении изменения ускорений в двух взаимно перпендикулярных плоскостях при малых изменениях параметров программы ориентации представляются в виде:


Исходя из этих отправных моментов, однотипные производные в продольном и боковом каналах равны между собой, а перекрестные - равны нулю:

 ,
,


 ,
,

Так как изменения ускорений в продольной и боковой плоскостях имеют одну и ту же зависимость, то можно определить функции чувствительности только для продольного канала и использовать их и для бокового канала управления.
Кажущееся ускорение  от МД можно записать в виде:
от МД можно записать в виде:
 ,
,
где Jyд - удельный импульс МД в пустоте;
τмд - условное время полного сгорания массы РБ на момент расчета функции чувствительности;
t - текущее время, отсчитываемое от момента определения функций чувствительности и изменяющееся от нуля до величины, равной оставшемуся времени до отсечки двигателя ts.
Производные изменения ускорений по управляющим воздействиям имеют вид:
 ,
,
 .
.
Интегрирование этих производных дает в прогнозируемой точке окончания маневра (при малых траекторных углах) функции влияния по радиальной скорости (Vϑ,  ), а повторное интегрирование - по линейному отклонению от базовой траектории (Rϑ,
), а повторное интегрирование - по линейному отклонению от базовой траектории (Rϑ,  ). С учетом того, что
). С учетом того, что
 ,
,
интегрирование дает следующие аналитические зависимости для функций чувствительности:
Vϑ=Jуд·Ls,
 ,
,
Rϑ=Jуд·[ts-(τ-ts)·Ls],

где 
В результате связь между отклонениями и корректирующими поправками записывается в виде системы уравнений
 ,
,
 ,
,
из решения которой определяются искомые поправки к программе ориентации, компенсирующие отклонения ΔR и ΔV:
 ,
,
 ,
,
где D - определитель системы

Аналогично определяются поправки к программе ориентации, компенсирующие отклонения ΔRb и ΔVb:
 ,
,
 .
.
С учетом полученных поправок параметры программы ориентации РБ (1), (2) принимаются равными:
ϑпр=ϑпр-Δϑ,
 ,
,
Для подтверждения эффективности предлагаемого способа управления РБ на участке доразгона проведено математическое моделирование и на фиг.4 приведены переходные процессы изменения программных углов тангажа (ϑпр) и рыскания (ψпр) при управлении по способу-прототипу, а на фиг.5 - эти же переходные процессы по предлагаемому способу. Моделирование проводилось при начальных прогнозируемых отклонениях от заданной орбиты ΔV=-6.06 м/с, ΔVb=-10.54 м/с, ΔR=-3385 м, ΔRb=-10870 м со следующими временными характеристиками доразгона и управления: ТКО=572 с, ТДКИ=14 с, Твкл=676 с, Твыкл=1177 с, Тпр=30 с, ТТУ=40 с, ΔТупр=20 с. В таблице приведены значения параметров программы ориентации, заданные в ПЗ и используемые в способе-прототипе и откорректированные по предлагаемому способу для конкретных начальных условий. В терминальном управлении изменение корректирующих поправок по тангажу Δϑ и рысканию Δψ на каждом такте ограничивалось на уровне ±6 градусов.
При использовании способа-прототипа для выработки программы ориентации, обеспечивающей построение требуемой круговой опорной орбиты с высотой 172 км, с помощью терминального управления выполняется 4 коррекции параметров программы ориентации.
При использовании предлагаемого способа за счет предварительного разворота по тангажу и рысканию на откорректированные углы ϑпр и ψпр при переходе на терминальное управление потребовалась незначительная корректировка программы ориентации. За счет этого преимущества достижение заданного функционала энергии и отключение МД произошли раньше, чем в способе-прототипе, и экономия в топливе составила 14.1 кг, расход топлива на стабилизацию РБ сократился на 1.12 кг.
 (град/с)
(град/с) (град/с)
(град/с)
Источники информации
1. Патент №2350521 от 16.11.2007 г., B64G 1/24, G05D 1/08.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2009 |
|
RU2408851C1 |
| СПОСОБ КОРРЕКЦИИ ВРЕМЕНИ ВКЛЮЧЕНИЯ МАРШЕВОГО ДВИГАТЕЛЯ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2011 |
|
RU2461496C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА В КОНЦЕ МАНЕВРА | 2010 |
|
RU2432596C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2007 |
|
RU2350521C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПРОГРАММЫ ОРИЕНТАЦИИ РАЗГОННОГО БЛОКА ПРИ ТЕРМИНАЛЬНОМ УПРАВЛЕНИИ ЕГО НАВЕДЕНИЕМ НА ЗАДАННУЮ ОРБИТУ | 2005 |
|
RU2282568C1 |
| СПОСОБ КОРРЕКЦИИ ПАРАМЕТРОВ ПРОГРАММЫ ОРИЕНТАЦИИ РАЗГОННОГО БЛОКА | 2010 |
|
RU2432595C1 |
| СПОСОБ КОРРЕКЦИИ ПАРАМЕТРОВ ПРОГРАММЫ ОРИЕНТАЦИИ ПРИ ТЕРМИНАЛЬНОМ УПРАВЛЕНИИ НАВЕДЕНИЕМ РАЗГОННОГО БЛОКА НА ЗАДАННУЮ ОРБИТУ | 2010 |
|
RU2454357C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ВРЕМЕНИ ОКОНЧАНИЯ МАНЕВРА И ОТСЕЧКИ МАРШЕВОГО ДВИГАТЕЛЯ РАЗГОННОГО БЛОКА | 2011 |
|
RU2467930C1 |
| КОСМИЧЕСКАЯ ГОЛОВНАЯ ЧАСТЬ ДЛЯ ГРУППОВОГО ЗАПУСКА СПУТНИКОВ | 2010 |
|
RU2428358C1 |
| СПОСОБ КОНТРОЛЯ ЗАПУСКА МАРШЕВОГО ДВИГАТЕЛЯ РАЗГОННОГО БЛОКА И ФОРМИРОВАНИЯ КОМАНДЫ "АВАРИЯ РАЗГОННОГО БЛОКА" НА УЧАСТКЕ ДОРАЗГОНА | 2010 |
|
RU2459748C1 |
Изобретение относится к управлению движением разгонного блока (РБ) при его выведении на орбиту. Согласно способу после отделения РБ от ракеты-носителя (РН) выполняют прогноз его движения на четырех последовательных временных участках. Первым из них является пассивный участок до заданного момента включения двигателей коррекции импульса для поджатия топлива. Второй участок простирается до момента запуска маршевого двигателя, третий - до начала изменения параметров программы ориентации РБ, четвертый - до момента достижения функционалом энергии заданного значения. В этот момент определяют отклонения от заданной орбиты по радиусу, радиальной скорости и по нормали к плоскости орбиты. Вычисляют чувствительность указанных отклонений к изменению начальных, на момент запуска маршевого двигателя, углов программы ориентации, а также - к скорости изменения данных углов, определенных на момент начала изменения параметров программы ориентации. После этого вычисляют корректирующие поправки к программе ориентации РБ по углам тангажа, рыскания и скоростям их изменения. Определяют новые откорректированные значения параметров программы ориентации и выполняют разворот РБ по указанным углам до достижения их уточненных начальных значений. Стабилизируют продольную ось РБ в соответствующей этим углам ориентации до момента начала отработки откорректированной программы ориентации. Техническим результатом изобретения является снижение энергетических затрат РБ путем корректировки программы его ориентации по тангажу и рысканию при фактических (отличных от номинальных) начальных условиях доразгона, возникших после отделения РБ от РН. 5 ил., 1 табл.
Способ управления движением разгонного блока на участке доразгона, заключающийся в том, что после отделения разгонного блока от ракеты-носителя стабилизируют продольную ось разгонного блока относительно ее направления на момент отделения от ракеты-носителя, считывают из полетного задания данные по параметрам управления и формируемой на доразгоне орбите разгонного блока, в заданные в полетном задании времена от момента отделения разгонного блока от ракеты-носителя включают на оговоренный в полетном задании интервал времени двигатели коррекции импульса для поджатия топлива в баках, запускают маршевый двигатель, спустя фиксированный момент времени после запуска маршевого двигателя начинают отработку программы ориентации разгонного блока по тангажу и рысканию корректируют программу ориентации с помощью терминального управления, выключают маршевый двигатель по достижению заданного функционала энергии и за установленный интервал времени до этого фиксируют программу ориентации, отличающийся тем, что после отделения разгонного блока от ракеты-носителя выполняют прогноз движения на четырех последовательных временных участках, в число которых входят пассивный участок от момента отделения от ракеты-носителя до заданного в полетном задании момента включения двигателей коррекции импульса для поджатия топлива, интервал времени от включения указанных двигателей коррекции импульса до включения маршевого двигателя, участок от момента запуска маршевого двигателя до начала изменения параметров программы ориентации разгонного блока, интервал времени от начала изменения параметров программы ориентации разгонного блока до достижения функционалом энергии заданного в полетном задании значения, определяют на момент достижения заданного функционала энергии отклонения от заданной орбиты по радиусу, радиальной скорости, отклонение по нормали к плоскости орбиты и скорость изменения этого отклонения, вычисляют чувствительность этих отклонений к изменению начальных углов программы ориентации, вычисленных на момент запуска маршевого двигателя, и их чувствительность к скорости изменения углов тангажа и рыскания, определенных на момент начала изменения параметров программы ориентации, вычисляют корректирующие поправки к программе ориентации в каналах управления по углам тангажа, рыскания и скоростям их изменения, определяют новые откорректированные значения параметров программы ориентации и выполняют разворот разгонного блока по тангажу и рысканию до достижения ориентации, определяемой их уточненными начальными значениями, и стабилизируют продольную ось разгонного блока в направлении, соответствующем этой ориентации, до момента начала отработки откорректированной программы ориентации.
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2007 |
|
RU2350521C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2305859C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2280589C2 |
| Женская прокладка с барьерными манжетами | 2016 |
|
RU2705944C2 |
| 9-(2-Нитрофенилтио)-6-окси-3,4-диметоксикарбонилтетрацикло (6,1,1,02,7,05,10) дец-3-ен,обладающий иммуностимулирующей активностью | 1979 |
|
SU772108A1 |

