Изобретение относится к испытательной технике и предназначено для испытаний и градуировки линейных и угловых акселерометров, гирос1 опоВр датчиков угловых скоростей и других измерительных преобразователей параметров движения.
Цель изобретения - расширение функциональных возможностей испытательного оборудования при высоком коэффициенте его использования на. малых производственных площадях путем гиб кой автоматизации изменения его стру туры.
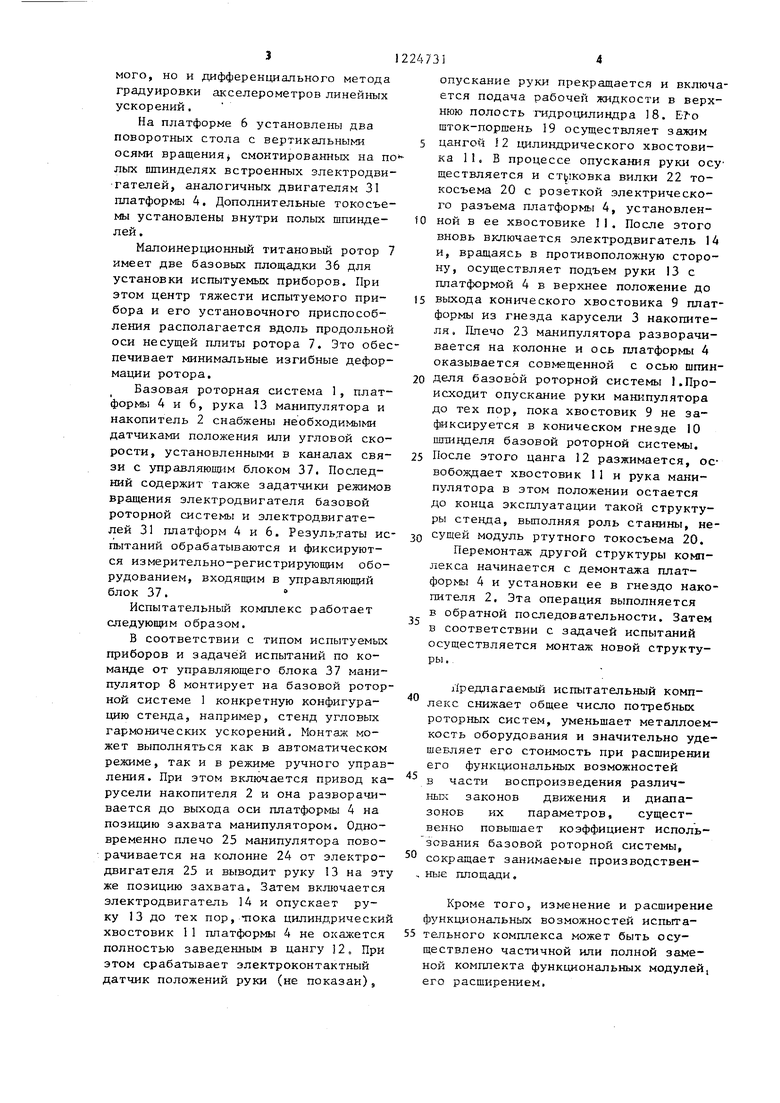
На фиг,1 изображен ис1н 1тательный комплекс, общий вид; на фиг. 2 то же5 вид в плане; на фиг, 3 - кинематическая схема агрегатов комплекса и связи с управляющим блоком; на фиг«47- функциональные модули:, входяпще в штатньй состав комплекса.
Испытательный комплекс (фиг.1 и 2) содержит базовую роторную систему 1 и поворотный накопитель 2, в гнездах карусели 3 которого расположены функциональные модули 4 - 7. Манипулятор
8служит для монтажа и перемонтажа функциональных модулей 4 - 7 на базовой роторной системе 1, Функциональные модули снабжены yнифициpoвaнны ш коническими хвостовиками 9 для стыковки с коническим гнездом 10 шпинделя базовой роторной системы 1. Соос- но хвостовику 9 в верхней части каждого функционального модуля 4-7 расположен второй хвостовик 1I цилиндрическая базовая поверхность которого служит для захвата модуля цанговым зажимом 12 руки 13 манипулятора (фиг.З). Подъем и опускание руки 13 осуществляется от реверсивного электродвигателя 14 через червячную передачу 15, шестерню 16 и зубчатую рейку 17, Привод цанги вьпюлнен в виде установленного на руке гидроцилинра 18J полый шток-поршень которого своей конической частью 19 сжимает или отпускает лепестки цанги, Подач,а рабочей жидкости в верхнюю и нижнюю полости цилиндра 8 осуществляется специальным гидронасосом (не показан) .
Внутри полой руки 13 закреп-пен корпус многоканального ртутного токосъема 20, служащего для съема элек рических сигналов с вращающихся исlaiTyei &ix изделий и подачи питания на электрические устройства вращающихся функциональных модулей 7,Бал токосъе
S
10
«
20
224731J
на 20 соединен податливой сильфонной мз фтой 21 с вилкой 22 электрических выводов, подсоединенных к-вращающимся: контактным кольцам токосъема. Ответная часть электрического разъема установлена в цилиндрическом хвостовике 11 каждого функционального модуля 4 - 7.
Привод поворота плеча 23 на колонке 24 манипулятора содержит реверсивный электродвигатель 25, редуктор 26 и зубчатую пару 27. Угол поворота плеча 23 вокруг вертикальной оси ограничен специальными упорами,выставляемыми при монтаже испытательно-градуи- ровочного центра.
Карусель 3 накопителя установлена на погоне насыпного шарикоподшипника 28 большого диаметра. Привод карусели включает электродвигатель 29, червячно-цилиндрический редуктор 30 и зубчатую пару. Точность останова карусели 3 в позиции захвата очередного функционального модуля для пе- 25 ремонтажа определяется коническим фиксатором (не показан).
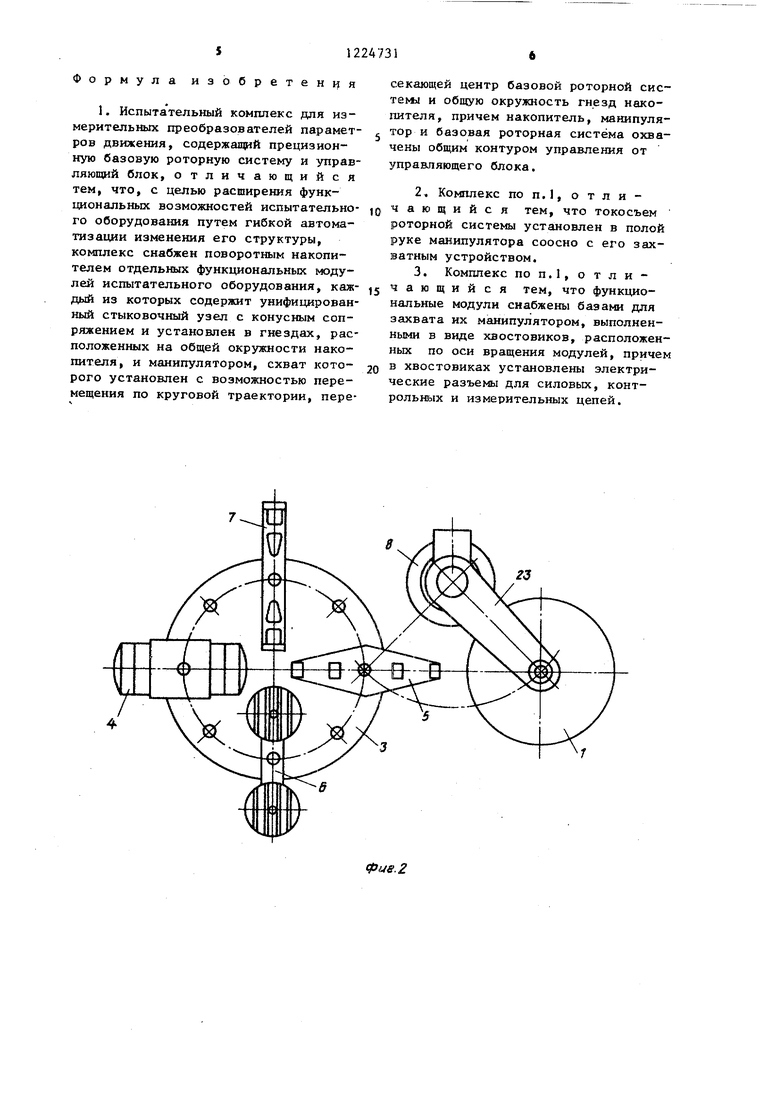
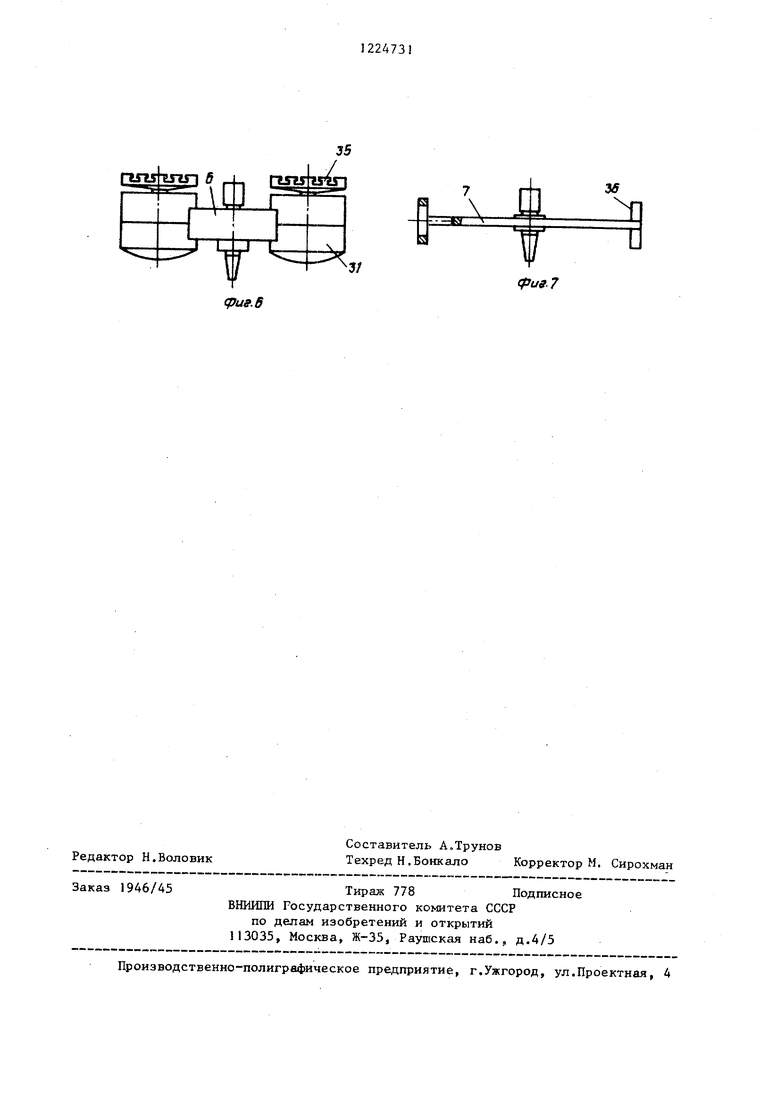
В зависимости от программы испытаний на карусели 3 может находиться тот или иной штатный комплект модулей. Основной штатный комплект модулей показан на фиг. 4-7. Комплект модулей содержит платформу 4 для нос- произведе:ния угловых гармонических ускорений, ротор 5 для статической градуировки акселерометров, платфор- 35 му 6 ДД1Я воспроизведения линейных гармонических ускорений, малоинер- ционный ротор 7 для воспроизведения различных функциональных законов движения с большими градиентами ускорения. Все модули статически и динами- чес:ки отбалансированы относительно оси вращения, В свободных гнездах карусели 3 могут устанавливаться и другие модули.
Платформа 4 содержит горизонтальный ротор с встроенным электродвигателем постоянного тока 31, контейнер 32 для испытуемых угловых акселерометров и горизонтальный ртутный токосъем 33, выход которого при монтаже; соединяется с входом (вилкой 22) токосъема 20,
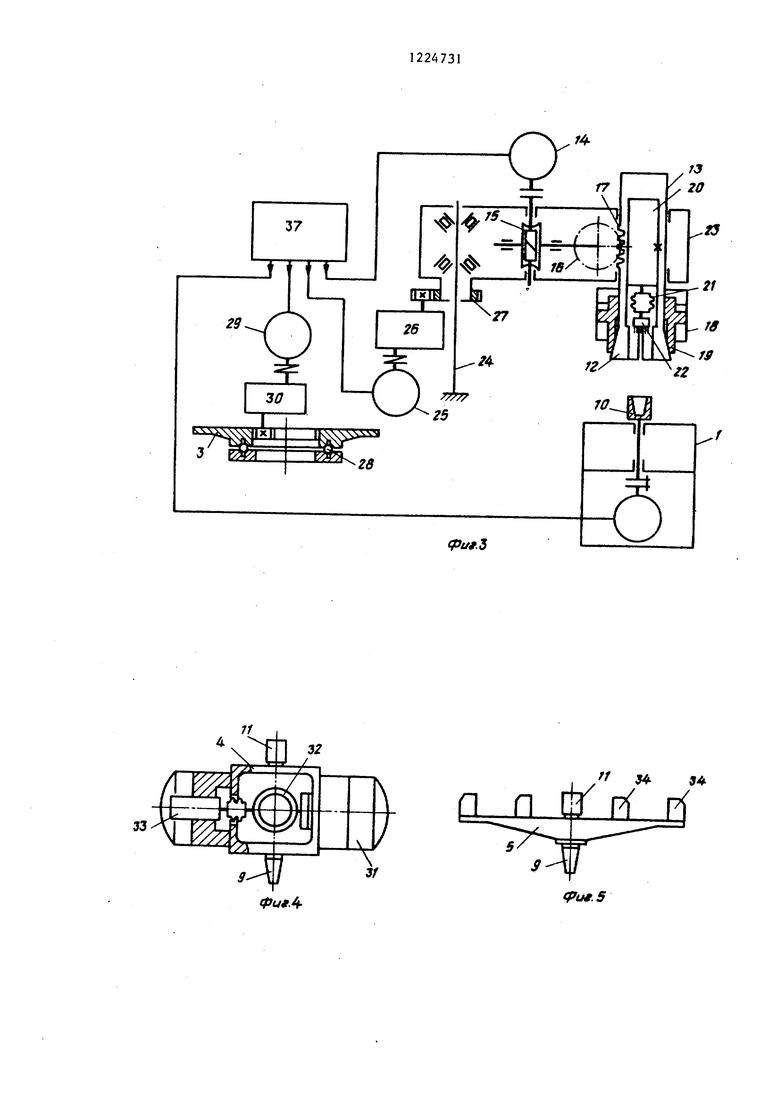
На роторе 5 неподвижно установлены две пары жестких базовых угольни- 55 ков 34 для крепления градуируемых
40
SO
акселерометров на двух различных радиусах от оси вращения, что дает возможность использования не только пря-
мого, но и дифференциального метода градуировки акселерометров линейных ускорений,
На платформе 6 установлены два поворотных стола с вертикальными осями вращения смонтированных на по лых шпинделях встроенных злектродви- гателей, аналогичных двигателям 31 платформы 4, Дополнительные токосъемы установлены внутри полых шпинделей.
Малоинердионньш титановый ротор 7 имеет две базовых площадки 36 для установки иcпытye QJDC приборов. При этом центр тяжести испытуемого прибора и его установочного приспособления располагается вдоль продольной оси несущей плиты ротора 7. Это обеспечивает минимальные изгибные деформации ротора.
Базовая роторная система 1, платформы 4 и 6, рука 13 манипулятора и накопитель 2 снабжены необходимыми датчиками положения или угловой скорости, установленными в каналах связи с управляющим блоком 37. Последний содержит также задатчики режимов вращения электродвигателя базовой роторной системы и электродвигателей 31 платформ 4 и 6. Резуль.таты испытаний обрабатываются и фиксируются измерительно-регистрирующим оборудованием, входящим в управляющий блок 37.
Испытательный комплекс работает следующим образом.
В соответствии с типом испытуемых приборов и задачей испытаний по команде от управляющего блока 37 манипулятор 8 монтирует на базовой роторной системе 1 конкретную конфигурацию стенда, например, стенд угловых гармонических ускорений. Монтаж может выполняться как в автоматическом режиме, так и в режиме ручного управления. При этом включается привод карусели накопителя 2 и она разворачивается до выхода оси платформы 4 на позицию захвата манипулятором. Одновременно плечо 25 манипулятора поворачивается на колонне 24 от электродвигателя 25 и выводит руку 13 на эт же позицию захвата. Затем включается электродвигатель 14 и опускает руку 13 до тех пор, -пока цилиндрически хвостовик 11 платформы 4 не окажется полностью заведенным в цангу 12. При этом срабатывает злектроконтактный датчик положений руки (не показан),
опускание руки прекращается и включается подача рабочей жидкости в верхнюю полость гидроцилиндра 18. E-fo шток-поршень 19 осуществляет зажим цангой 12 цилиндрического хвостовика 11. В процессе опускания руки осу ществляется и стыковка вилки 22 токосъема 20 с розеткой электрического разъема платформы 4, установленной в ее хвостовике 11. После этого вновь включается электродвигатель 14 и, вращаясь в противоположную сторону, осуществляет подъем руки 13 с платформой 4 в верхнее положение до выхода конического хвостовика 9 платформы из гнезда карусели 3 накопителя. Плечо 23 ма1нипулятора разворачивается на колонне и ось платформы 4 оказывается совмещенной с осью шпинделя базовой роторной системы 1.Происходит опускание руки манипулятора до тех пор, пока хвостовик 9 не зафиксируется в коническом гнезде 10 шпинделя базовой роторной системы,
После этого цанга 12 разжимается, освобождает хвостовик 11 и рука манипулятора в этом положении остается до конца эксплуатации такой структуры стенда, выполняя роль станины, несущей модуль ртутного токосъема 20.
Перемонтаж другой структуры комплекса начинается с демонтажа платформы 4 и установки ее в гнездо накопителя 2. Эта операция выполняется в обратной последовательности. Затем в соответствии с задачей испытаний осуществляется монтаж новой структуры, ,
предлагаемый испытательный комплекс снижает общее число потребньсх роторных систем, уменьшает металлоемкость оборудования и значительно удешевляет его стоимость при расщирении его функциональных возможностей в части воспроизведения различных законов движения и диапазонов их параметров, существенно повышает коэффициент использования базовой роторной системы, сокращает занимаемые производственные площа,ци.
Кроме того, изменение и расширение функциональных возможностей испыта- 55 тельного комплекса может быть осуществлено частичной или полной заменой комплекта функциональных модулейi его расширением.
Формула изобретения
1. Испытательный комплекс для измерительных преобразователей парамет- ров движения, содержащий прецизионную базовую роторную систему и управляющий блок, отличающийся тем, что, с целью расширения функциональных возможностей испытательно- го оборудования путем гибкой автоматизации изменения его структуры, комплекс снабжен поворотным накопителем отдельных функциональных модулей испытательного оборудования, каж- дый из которых содержит унифицированный стыковочный узел с конусным сопряжением и установлен в гнездах, расположенных на общей окружности накопителя, и манипулятором, схват кото- рого установлен с возможностью перемещения по круговой траектории, пересекающей центр базовой роторной сис- Tenj и общую окружность гнезд накопителя, причем накопитель, манипулятор и базовая роторная система охвачены общим контуром управления от управ-пяющего блока.
2,Комплекс по п.1, о т л и - чающийся тем, что токосъем роторной системы установлен в полой руке манипулятора соосно с его захватным устройством.
3.Комплекс по п.1, о т л и - чающийся тем, что функциональные модули снабжены базами для захвата их манипулятором, выполненными в виде хвостовиков, расположенных по оси вращения модулей, приче в хвостовиках установлены электрические разъемы для силовьк, контрольных и измерительных цепей.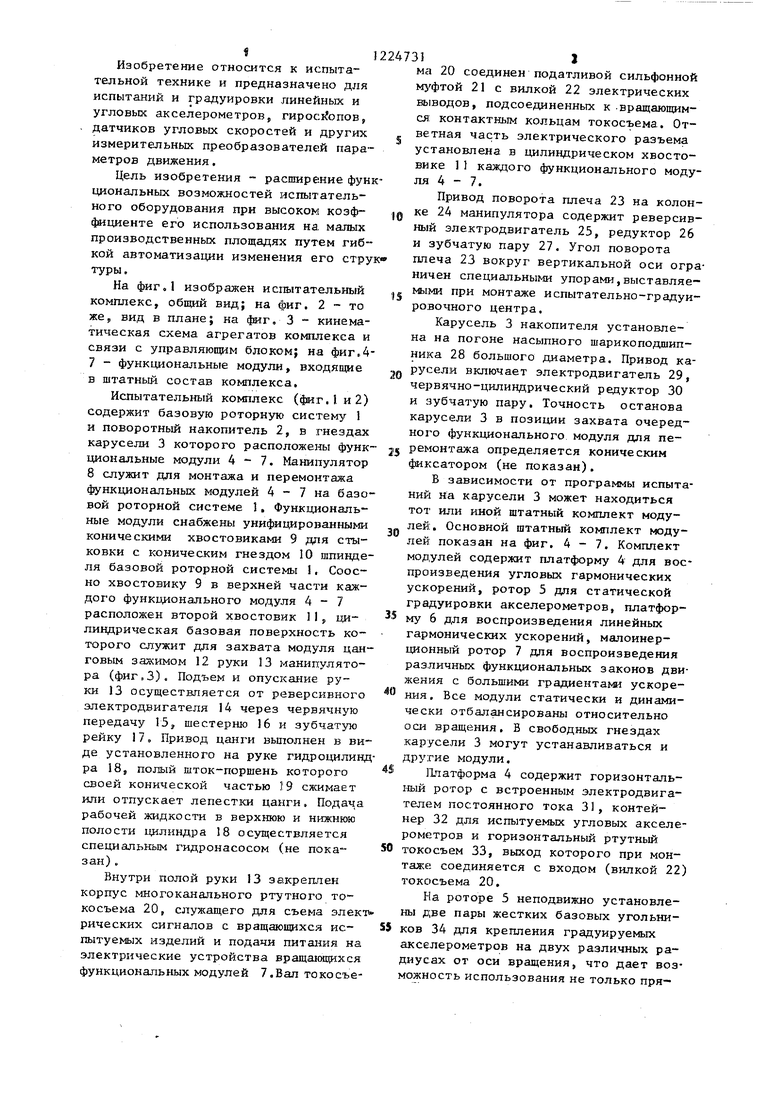
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд линейных ускорений | 1975 |
|
SU583398A1 |
| Центрифуга | 1983 |
|
SU1157463A1 |
| Роботизированный технологический комплекс | 1987 |
|
SU1465264A1 |
| Автоматизированный технологический комплекс | 1985 |
|
SU1349969A1 |
| ГРАДУИРОВОЧНАЯ ЦЕНТРИФУГА | 1987 |
|
SU1840766A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Стенд для испытания интеллектуальной системы адаптивного управления процессом резания на металлорежущих станках со шпиндельным узлом с активными магнитными подшипниками | 2015 |
|
RU2690625C2 |
| Автооператор | 1987 |
|
SU1465244A1 |
| Способ угловых гармонических ускорений | 1975 |
|
SU577460A1 |
| Многоцелевой станок с ЧПУ | 1985 |
|
SU1351739A1 |
Изобретение предназначено для испытаний и градуировки измеритель- преобразователей nataMeTpOB движения. Целью изобретения является расширение функциональных возможностей испытательного оборудования путем гибкой автоматизации изменения его структуры. Комплекс включает базовую ро- торную систему 1 (БРС), на которой по команде от управлянидего блока манипулятор 8 монтирует конкретную конфигурацию стенда. В гнездах карусели 3 поворотного накопителя 2 установлены функциональные модули 4,5 ,.6,7, снабженные унифицированными коническими хвостовиками 9 для стыковки с коническим гнездом 10 шпинделя БРС и хвостовиками 11 для захвата модуля цанговым зажимом 12 руки 13 манипулятора. Схват манипулятора установлен с возможностью перемещения по круговой траектории, пересекающей центр БРС 1. Токосъем БРС установлен в полой руке 13 манипулятора соосно с его захватным устройством, а в хвостовиках 11, расположенных по оси вращения модулей, установлены электрические разъемы для силовых, контрольных и измерителы{ых цепей. 2 з.п.ф-лы 7 ил. С S (Л t ю tc 4 СО futi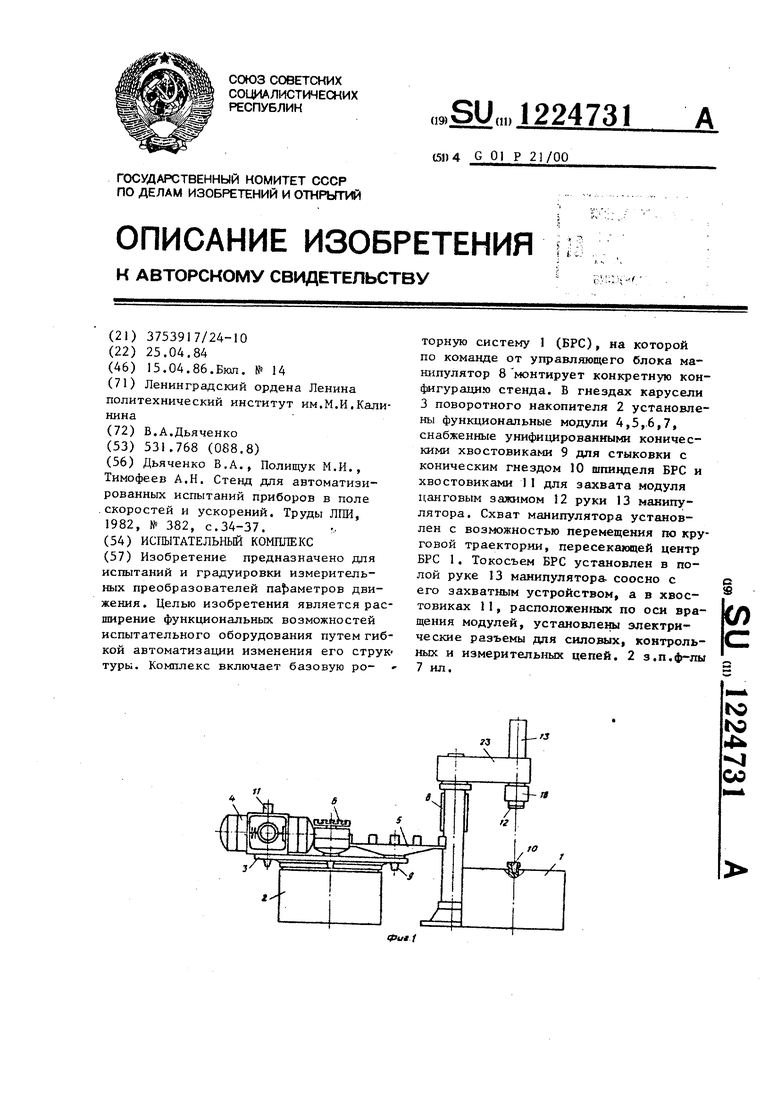
Фив. 2
37
-)
S
3 ЙЙ
ш
/J
tfJuf.S
11
ой
3f
33
J
tput.S
3S
Б
(.
Редактор Н.Воловик
Заказ 1946/45
Тирагк 778Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/3
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Составитель А.Трунов
Техред Н.Бонкало Корректор М, Сирохман
| Дьяченко В.А., Полищук М.И., Тимофеев А.Н | |||
| Стенд для автоматизированных испытаний приборов в поле .скоростей и ускорений | |||
| Труды ЛПИ, 1982, № 382, с.34-37. |
