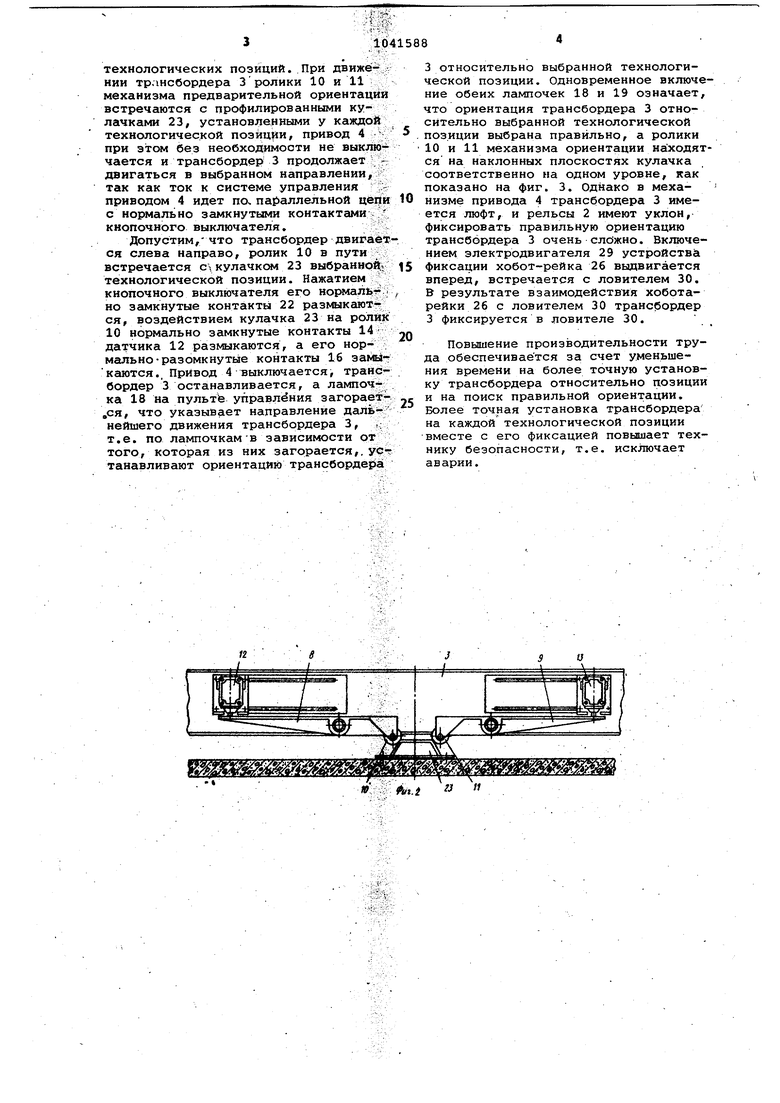
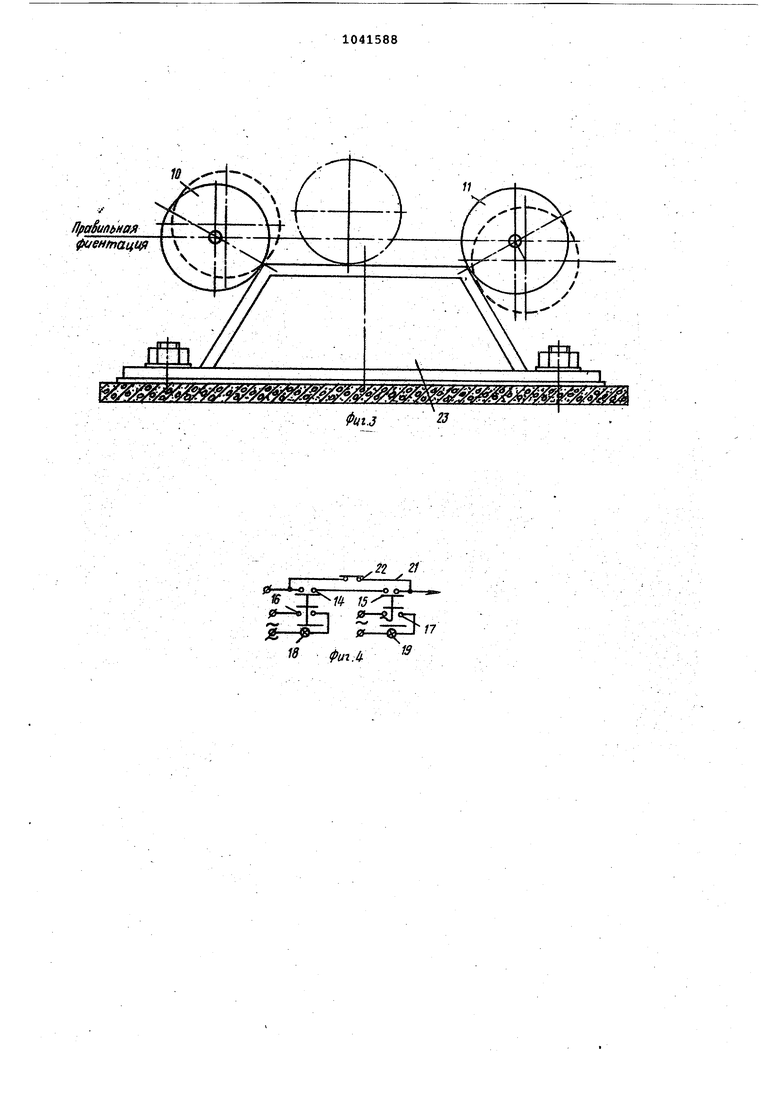
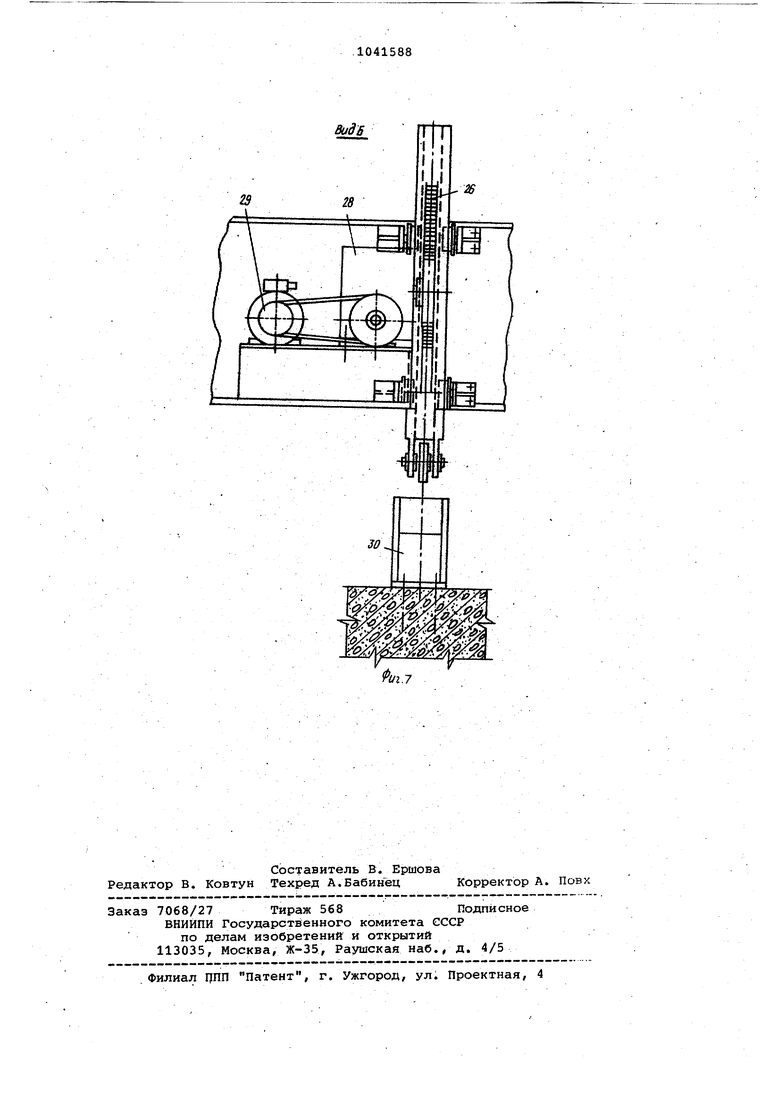
Изобретение относится к металлур гии, а именно к оборудованию технологических линий, и предназначено для обслуживания нагревательных печей и других технологических устройст Известен термический агрегат, включающий расположенное в ряд технологическое оборудование и перемещающийся вдоль ряда трансбордер с шаржир-машиной, обслуживакидей это оборудование при транспортировке крупногабаритных изделий ij . На каждой технологической позици и на трансбордере предусмотрены рел сы для передвижения выдвижной тележ ки шаржир-машины с трансбордера на технологическую позицию и обратно. Однако требуется много времени для точной остановки трансбордера относительно каждой технологической позиции из-за отсутствия механизма фиксации тележки. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является устройств для транспортирования подин техноло гических агрегатов 2 . Устройство содержит направляющиё расположенные вдоль ряда технологического оборудования, трансбордерную тележку с размещенными на ней рельсами для транспортного средства к механизм фиксации тележки, обеспечивающий точную ее установку относител но технологической позиции при за грузке-выгрузке. Недостатком известного устройства является отсутствие механизма предварительной ориентации тележки, что снижает производительность агрегата Цель изобретения - автоматизация загрузки-выгрузки. Поставленная цель достигается тем, что термический агрегат, содержащий установленное в ряд технологическое оборудование, расположенные вдоль него направляющие, трансбордерную тележку с рельсами йа ней для транспортного средства и механизм фиксации тележки, снабжен механизмом предварительной ориентации тележки , выполненным в виде пары двуплечих рычагов с установленными на их концах копирными роликами и профильных копиров, расположенных перед каждой единицей технологического оборудования на оси его загрузкивыгрузки, при этом двуплечие рычаги закреплены на боковой стороне тележки, копирные ролики в-заимодействуют с копирами, а другие концы рычагов связаны с приводом тележки посредством установленных на них датчиков. Кроме того, механизм предварительной ориентации тележки снабжен датчиками сигнализации. На фиг. 1 изображен агрегат, вид в плане ; на фиг. 2 - механизм предварительной ориентации, закрепленный на боковой стороне трансбордера на фиг. 3 - схема взаимодействия п)офилированного кулачка с роликами; на фиг. 4 - электрическая схема соединения датчиков механизма, ориентации; на фиг. 5 - разрез А-А на фиг. 1; на фиг. б - вариант вьшолнения ловителя; на Фиг. 7 - вид Б на фиг. 5, Термический агрегат включает технологическое оборудование 1 (печи нагрева, камеры охлаждения и др.), установленное в ряд. Вдоль него проложены рельсы 2, по которым перемещается трансбордер 3 от привода 4. На трансбордере 3 закреплены рельсы 5, на которых посредством колес установлена шаржир-машина 6. Такие же рельсы 7 проложены на каждой технологической позиции. На боковой стогроне трансбордера 3 установлены симметрично рычаги 8 и 9 механизма предварительной ориентации с роликами 10 и 11 и датчиками 12 и 13. Каждый датчик имеет нормально замкнутые контакты 14 и 15 соответственно и нормально разомкнутые; контакты 16 и 17, которые находятся в цепи сигнальных лё1мпочек 18 и 19, установленных на пульте управления (не показан), находящемся на площадке 20 трансбордера. Контакты 14 и 15 находятся в цепи системы управления приводом 4 трансбордера. В параллельной цепи 21 находится кнопочный выключатель с нормально замкнутыми контактами 22. Механизм предварительной ориентации содержит закрепленный у каж;г1Ой технологической позиции профилированный 23 с симметрично наклонными поверхностями. Механизм .фиксации положения трансбордера установлен на нем и представляет собой выдвижную по. направляющим роликами 24 и 25 хобот-рейку 26, находящуюся в зацеплении с шестерней 27, кинематически связанной с редуктором 28 привода, электродвигатель 29 которого связан с редуктором посредством ременной передачи. У каж дой технологической позиции закреплен ловитель 30 с фиксирующими поверхностями и взаимодействукядими с охватываемым элементом 31 хобота при коррекции положения трансбордера и его фиксации. Oxвaтывae влй элемент может быть выполнен в виде ролика или в виде наконечника 32. Когда охватываемый элемент выполнен в вие наконечника, ловитель выполняют в виде двух роликов 33. Агрегат работает следующим образом. От привода 4 трансбордер 3 передвигается по рельсам 2 вдоль ряда технологических позиций. При движении трансбордера 3 ролики 10 и 11 механизма предварительной ориентации встречаются с профилированными кулачками 23, установленными у каждой технологической позиции, привод 4 при этом без необходимости не выключается и трансбордер 3 продолжает двигаться в выбранном направлении, так как ток к системе управления приводом 4 идет пОч параллельной цепи с нормально замкнутыми контактами кнопочного выключателя. Допустим,что трансбордер двигает ся слева направо, ролик 10 в пути встречается с кулачком 23 выбранной, технологической позиции. Нажатием кнопочного выключателя его нормаль- . но замкнутые контакты 22 размыкаются, воздействием кулачка 23 на ролик 10 нормально замкнутые контакты 14 датчика 12 размыкаются, а его нормально-разомкнутые контакты 16 замыкаются.. Привод 4 выключается, трансбордер 3 останавливается, а лампочка 18 на пульте управления загорает,ся, что указывает направление дальнейшего движения трансбордера 3, т.е. по лампочкамВ зависимости от того, которая из них загорается,. уСт танавливают ориентацию трансбордера 3 относительно выбранной технологической позиции. Одновременное включение обеих лампочек 18 и 19 означает, что ориентация трансбордера 3 относительно выбранной технологической позиции выбрана правильно, а ролики 10 и 11 механизма ориентации находятся на наклонных плоскостях кулачка соответственно на одном уровне, как показано на фиг. 3. Однако в механизме привода 4 трансбордера 3 имеется люфт, и рельсы 2 имеют уклон, фиксировать правильную ориентацию трансбордера 3 очень слсЗжно. Включением электродвигателя 29 устройства фиксации хобот-рейка 26 вьадвигается вперед, встречается с ловителем 30. В результате взаимодействия хоботарейки 26 с ловителем 30 трансбордер 3 фиксируется в ловителе 30. Повышение производительности труда обеспечивается за счет уменьшения времени на более точную установку трансбордера относительно позиции и на поиск правильной ориентации. Более точная установка трансбордера на каждой технологической позиции вместе с его фиксацией повышает технику безопасности, т.е. исключает аварии.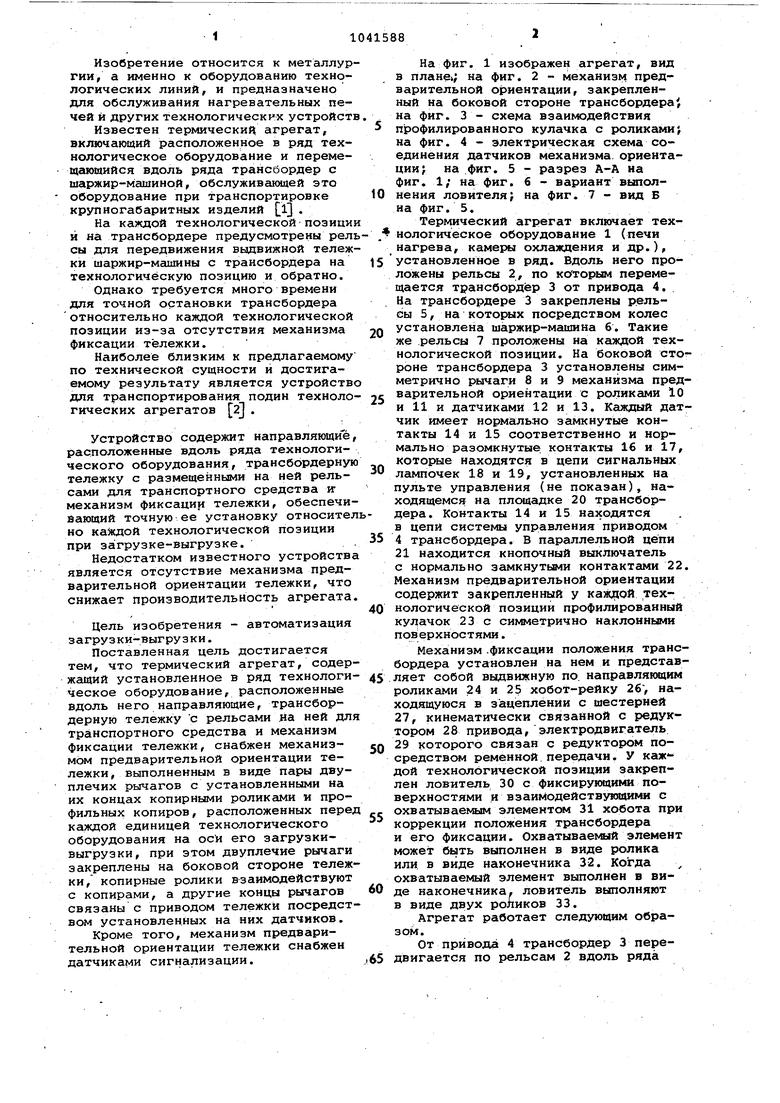
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНЫЙ ТРАНСБОРДЕР ДЛЯ ПЕРЕМЕЩЕНИЯ СУДОВЫХ КОНСТРУКЦИЙ И СУДОВ В ДВУХ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ НАПРАВЛЕНИЯХ | 1991 |
|
RU2046733C1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ СБОРКИ ЗВЕНЬЕВ ПУТЕВОЙ РЕШЕТКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2010 |
|
RU2436886C1 |
| Технический комплекс космодрома | 2016 |
|
RU2616036C1 |
| Устройство для перемещения рельсовых транспортных средств на трансбордерной тележке | 1980 |
|
SU998193A1 |
| Устройство для продольного перемещения длинномерных изделий | 1985 |
|
SU1261729A1 |
| ТРАНСБОРДЕРНАЯ ТЕЛЕЖКА ДЛЯ ТРАНСБОРДЕРА ТЕХНИЧЕСКОГО КОМПЛЕКСА КОСМОДРОМА | 2012 |
|
RU2534591C2 |
| ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ ПЕРЕМЕЩЕНИЯ БЛОК-СЕКЦИЙ КОРПУСА СУДНА | 2006 |
|
RU2319638C1 |
| Автомат для дуговой приварки труб к трубным решеткам | 1979 |
|
SU919838A2 |
| МАНИПУЛЯТОР К КОВОЧНЫМ ВАЛЬЦАМ | 1973 |
|
SU388825A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ДВУХСТОРОННЕЙ ПРИВАРКИ РЕБЕР ПРЕРЫВИСТЫМ ШВОМ | 1993 |
|
RU2094199C1 |
1. ТЕРМИЧЕСКИЙ АГРЕГАТ, С содержащий установленное в ряд тех нологическое оборудование, располо женные вдоль него направляквдие, трансбордерную тележку.с рельсами на ней для транспортного средства и механизм фиксации тележки, о т- личающийся тем, что, с целью автоматизации загрузки - выгрузки, агрегат снабжен механизмом предварительной ориентации.тележки, выполненным в виде пары двуплечих рычагов с установленными на их концах копирными роликами и профильных копиров, расположенных перед каждой единицей технологического оборудования на оси его загрузки - выгрузки, при этом двуплечие рычаги закреплены на боковой стороне тележки, копирные ролики взаимодействуют с копирами, а другие концы рычагов-связаны с приводом тележки посредством установленных на них датчиков. 2. Агрегат по п. 1, о т л и ч аю щ и и с я тем, что механизм предварительной ориентации тележки снаб л жен датчиками сигнализации. ел 00 00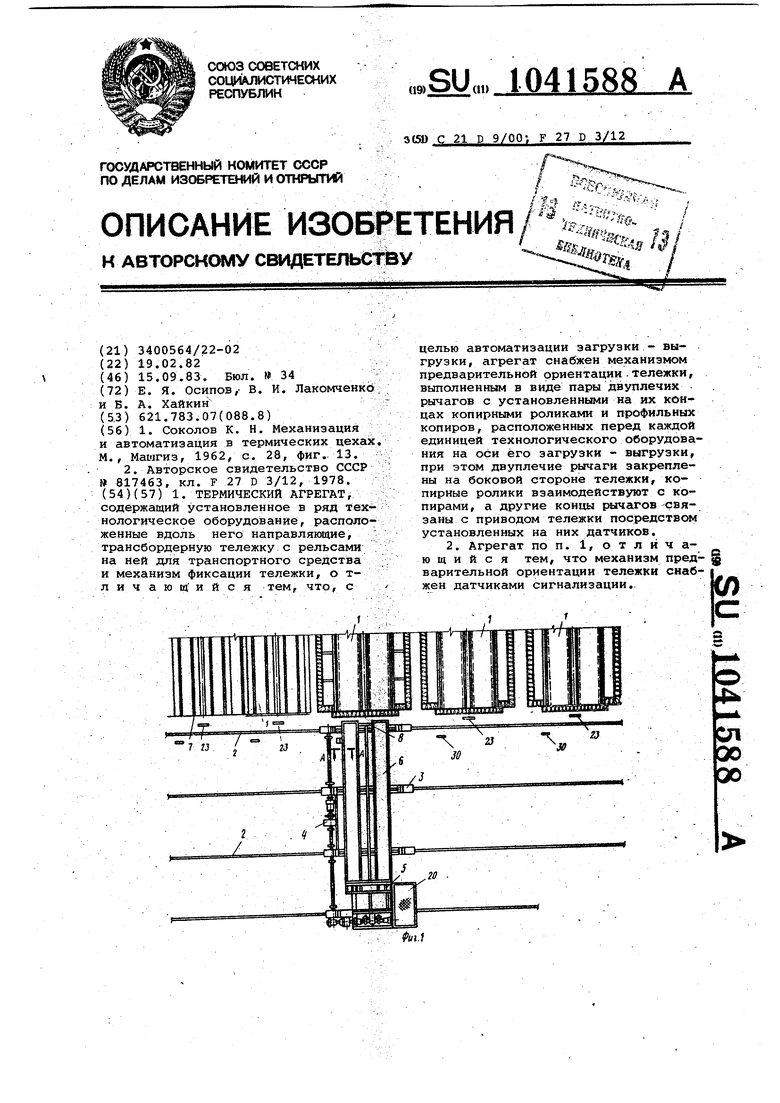
«
А1.г « Праёитгная фиентаци г
15
П I-} 0--«-I
18 фuг:l ФЦ1.3
.П 21
17
13
21
Виде
23
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Соколов К | |||
| Н | |||
| Механизация и автоматизация в термических цехах | |||
| М., Машгиз, 1962, с | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Насос | 1917 |
|
SU13A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для транспортированияпОдиН ТЕХНОлОгичЕСКиХ АгРЕгАТОВ | 1978 |
|
SU817463A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
