И
сг
Фи11
л/У/чГ
«4; ю
00. 4;
iCO
2,Устройство по п. 1, о т п и ч а ю щ е е с я тем, что бпок коррекции задания выпопньн в виде элемента умножения, четырех ключей и соединенных между собой двух интеграторов, запоминающего элемента, формирователя mvCiyribсов и анапвзатора объекта в виде соедийенных между собой элементов дифференцирования h деления производной статического момента m частоту вращения, при этом датчик частоты вращения соединен с одним из входов элемента деления
и через первый ключ - с входом блока установки началь№1х команд первого интегратора, датчик мсялента статичеокого сопротивления соединей через второй ключ с одним рабочим входом первого интегратора н через дифференцирующий элемент анализатора объекта - с вторым входом упомянутого эпемента делейия, втСоды эпемента умножения сое динены с выходом второго интегратора, вход блока установки начапьиых Еомавд которого соединен через третий ключ С шиной нулевого потенциала устройства, и выходом элемента деления анапшатора объекта, а выход элемента умножения соединен через четвертый ключ G вто{И ш рабочим входом первого интегратора и информационным входом запоминающего эпемента, причем выход запоминаютеего элемента является выходом блока коррекции задания, и управляющие входы хюрвого и третьего ключей соединены между собой и подключены к первому выходу формирователя импульсов, управляющие входы второго и четвертого ключей соединены между собой и подключены к второму выходу формирователя 1мпульсов и управляющий вход запоминающего эпеме та подключен к третьему выходу формирователя импульсов, вход которого соедЕН вен с выходом первого интегратора.
3.Устройство по пп. 1 и 2, о т п ичающееся тем, что бтюк коррекиии задания выполнен в вще анализатора объекта и (Ьдели привода в виде квадратора, элемента деления и элемента умиожевия, причем датчик частоты вращения рабочего органасоединен с входом квалратора, датчик момевта статического сопротивления - с входом анализатора , объекта и оиктл вз входов элемента деле йия, второй вход которого соединев с выходом квадратора, входы элемента умног жесгая соединевы с выходом элемента
депения квадрата частоты вращения рабо бочего органа на момент статического сопротивления и выходом анализатора объекта, а ЁЫХОД элемента умножения является выходом блока коррекции задания, / 4. Устройство по п. 1, о т л и ч а ю щ.е е с я тем, что блок коррекции задания выполнен в виде элементов умножения, деления и дифференцирования, причем датчик частоты вращения рабочего органа соединен с первым входом эпемента умножения, датчик момента статического сопротивления - с одним входом элемента деления и через дифференцирующий элемент - с вторым входом элемента умножения, другой вход элемента деления выходного сигнала элемента умножения на момент статического сопротивления соединен с выходом упомянутого элемента умножения, а выход элемента деления
является выходом блока коррекции задания.
5. Устройство по пп, 1 и 3, о т л Вчающееся тем, что модель привода выполнева в виде квадратора и эле Ментов умножения, деления и дифференикн
рования, причем датчик частоты вращения рабочего органа соединен с входами квадратора и дифференцирующего элемента, входы элемента делентет квадрата частоты вр1ащения рабочего органа на производную частоту вращения - с выходами квадратора и дифференцирующего элемента, а вхоп ды элемента умножения соединенъ с выходами элемента деления и анализатора объекта,
6. Устройство по п, 1, отличающее с я тем, что блок коррекции задания выполнен в виде двук дифферевецирующих элементов и элементов умноже ния и деления, причем датчик частоты вращения рабочего органа соединен с входом первого ди1 ренцирующего элемента и одним из входов элемента уЛножекия, выход первого дифференцирующего элемента - с входом второго дифференцируклцего элементй, входы элемента деления второй производной на первую производную частоты вращения рабочего оргш1а соединевы с выходами второго и первого дифферевиврующих элементов, а выход элемента депенш - с вторы входом упомявутого элемент& умвоженга, выход которого является выходом блока коррекции задавия.
Изобретение относится к энергеттебкому и нефтехимическому машиностроению в частности к устройствам контроля степени развапьцовки труб в трубных решетках теплообменных агашратов.
V Известно устройство для контроля степени развальцовки труб, содержащее датчик частоты вращения рабочего органа, соединенные с входами компаратора датчик и задатчик момента статического сопротивления и подключенный к выходу компаратора блок управления приводным электродвигателем -1J..
Недостатком известного устройства является ограниченная точность контропя степени развальцовки, потому что не уч№тывае ся дополнительная раздача трубы при выбеге приводного электродвигателя.
Раздача при выбеге является переменной величиной, так как зависит не только от запаса кинетической энергии вращающихся частей привода, но и от мо мента сопротивления на валу рабочего органа, который в момент отключения электродвигателя может быть различным.
Целью изобретения является повышение точности контроля степени развальцовки труб..
Поставленная цель достигается тем, рто устройство для контроля степени р(азвальцовки труб, содержащее датчик частоты В1 щения рабочего органа, осуществляющего развальцовку, соединенные с , ветствующими двумя входами ксялларатора задатчик и датчик момента статического сопротивления и подключенный к выходу компаратора блок управления приводньЫ электродвигателем, снабжено блоксы коррекции задания, а к компаратору дополнительно подключен выход блока коррекци задания, входы же блока коррекции задания соединеньГ с датчиком момента статического сопротивления и с датчиком частоты вращения рабочего органа.
Блок коррекции задания выполнен в виде элемента умножения, четырех ключей и соединенных между собой двух интеграторов, запоминающего элемента, формирователи импульсов и анализатора объекта
в виде соединенных между собой элементов дифференцирования и деления iipoизводЕОй статического момента на частот вращения, при этом датчик « частоты вращения соединен с одним из входов элемента деления и через первйй квюч с входом блока установки начальных комйнд первого интегратора, датчик момента статического сопротивления соедвней через второй ключ с одним рабочим
входом первого интегратора и через ДЙфференцируюший элемент анализатора объекта - с вторым входом упомянутого элемента деления,входы элемента умножения соединены с выходом второго интегратора,вход блока установки начальных команд которого соединен через третий ключ с шиной нулевого потенциала устройства, и выходом элемента деления анализатора объекта, а выход элемента умножения соединен, через четвертый ключ с вторым рабочим входом первого интегратора и информационным входом запоминающего элетдента, причем выход запоминающего элемента является выходом
5 блока коррекции задания, и управляющие входы первого и треть,его ключей соед Het&i между собой и подключены к первому выходу формирователя импульсов, угфавлякнцие входы второго и четвертого
0 ключей соединены между собой и -подалкучены к второму выходу формирователя импульсов, и 5гаравпяющий вход запоминающего элемента подключен к третьему выходу формирователя -импульсов, вход
5 которого соединен с выходом первого интегратора.
Бпок коррекции задания выполнен в виде анализатора объекта и модели привода в виде квадратора, элемента де0ления и элемента умножения, причем дарчик частоты вращения рабочего органа соединен с входом квадратора, датчик момента статического сопротивления - с . входом анализатора объекта и одним .из
5 входов элемента деления, второй вход которого соединен с выходом квадратора, входы элемента умножения соединены с выходом элемента деления квадрата частоты вращения .его органа на момент
0 статического сопротивления и выходом анализатора объекта, а вь1ход элемента умножения является выходом блока кор- рекции задания.
Кроме того, блок коррекции задания
5 выполнен в виде элементов умножения, деления и дифференцирования, причем датчик частоты вращения рабочего органа соединен с первым входом элемента умножения, датчик момента статического со0противления - с одним входом элемента деления и через дифференцирующий эле. мент - с- вторым входом элемента- ум« жения, другой вход элемента деления выходного сигнала элемента умножения на
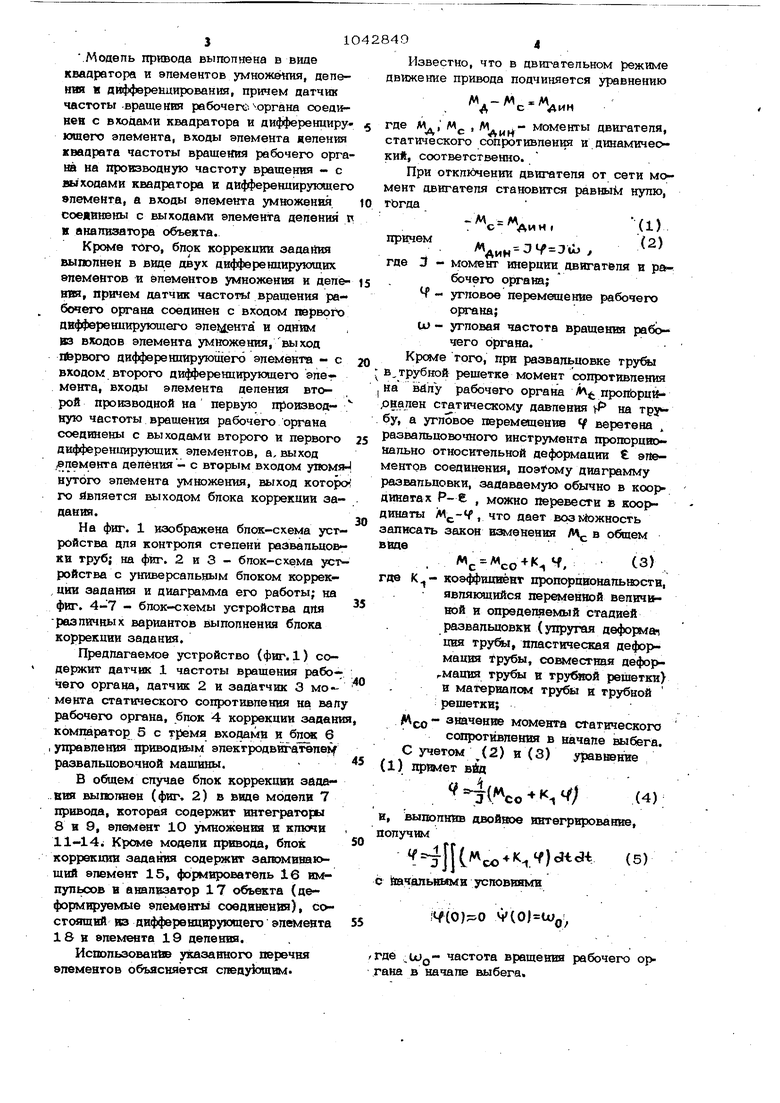
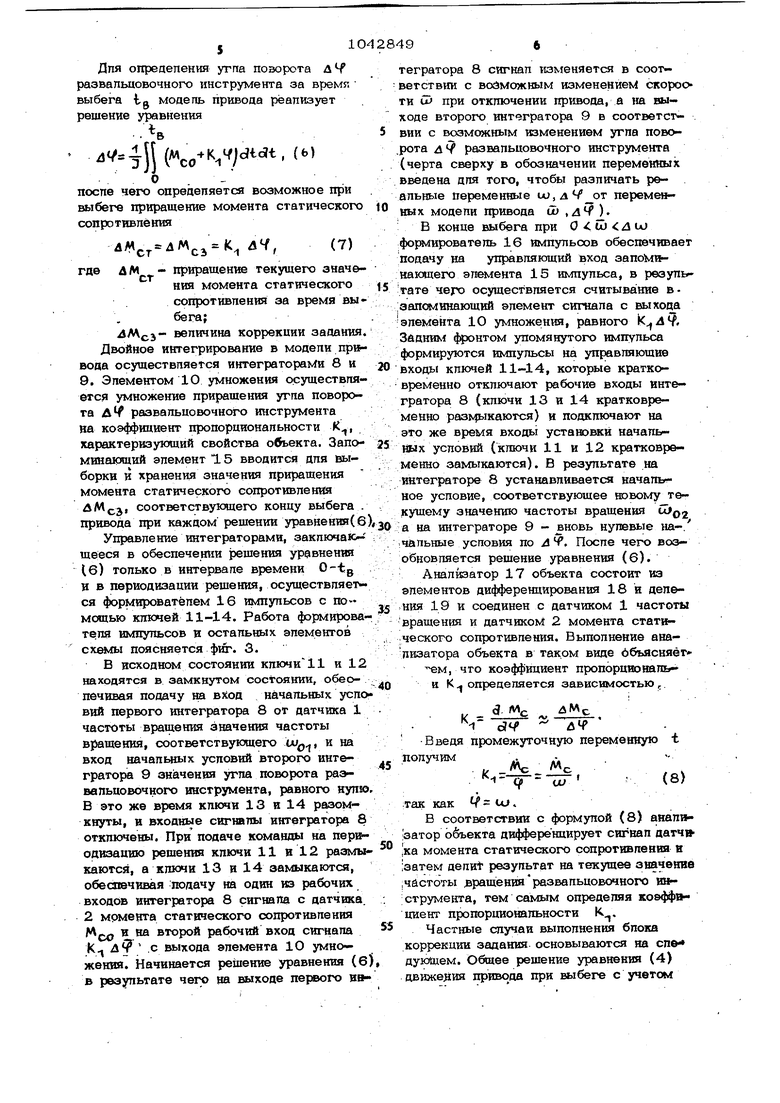
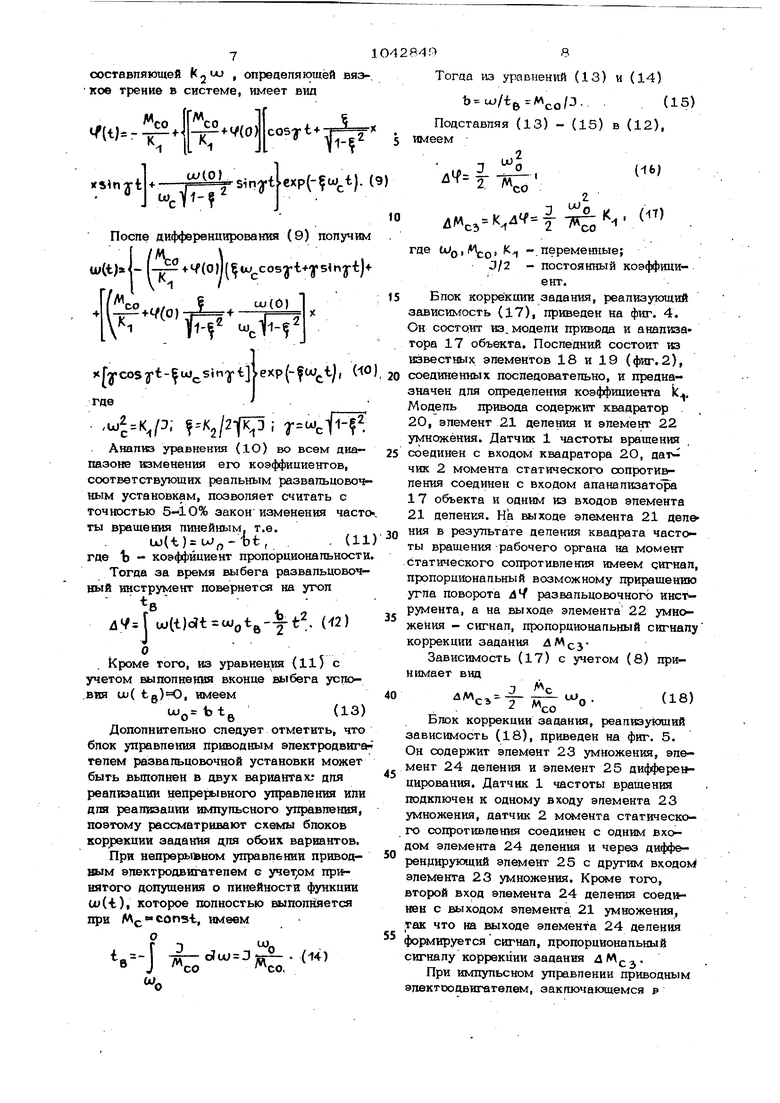
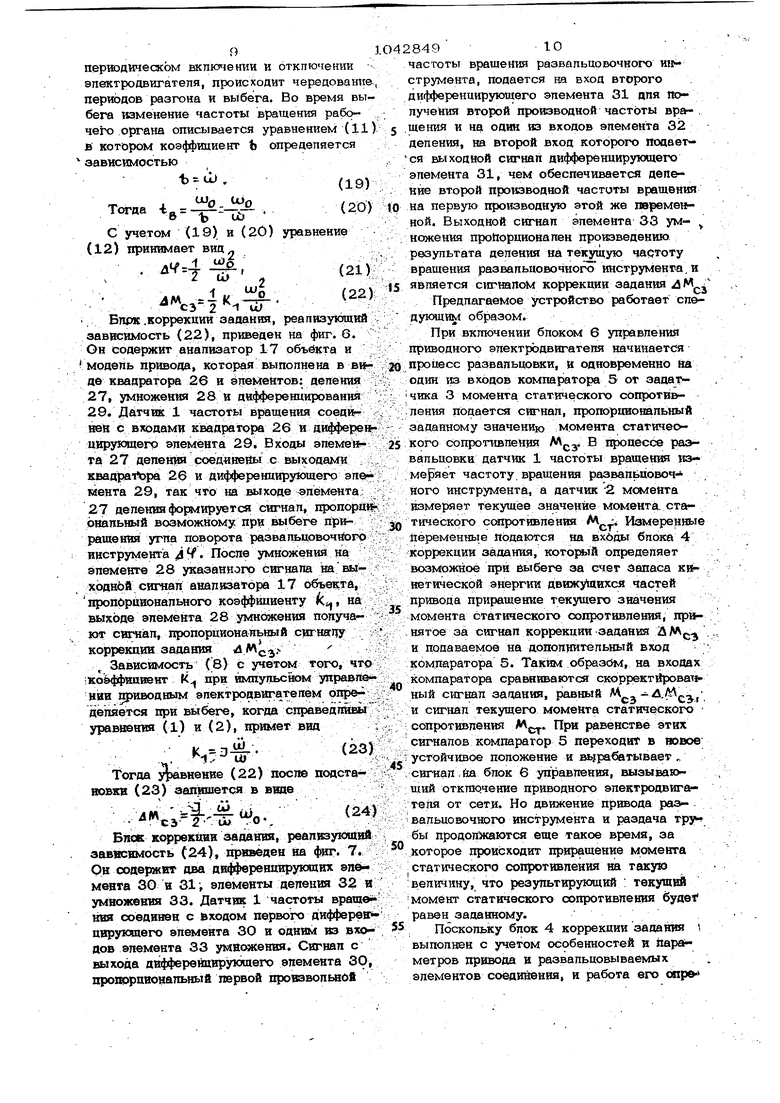
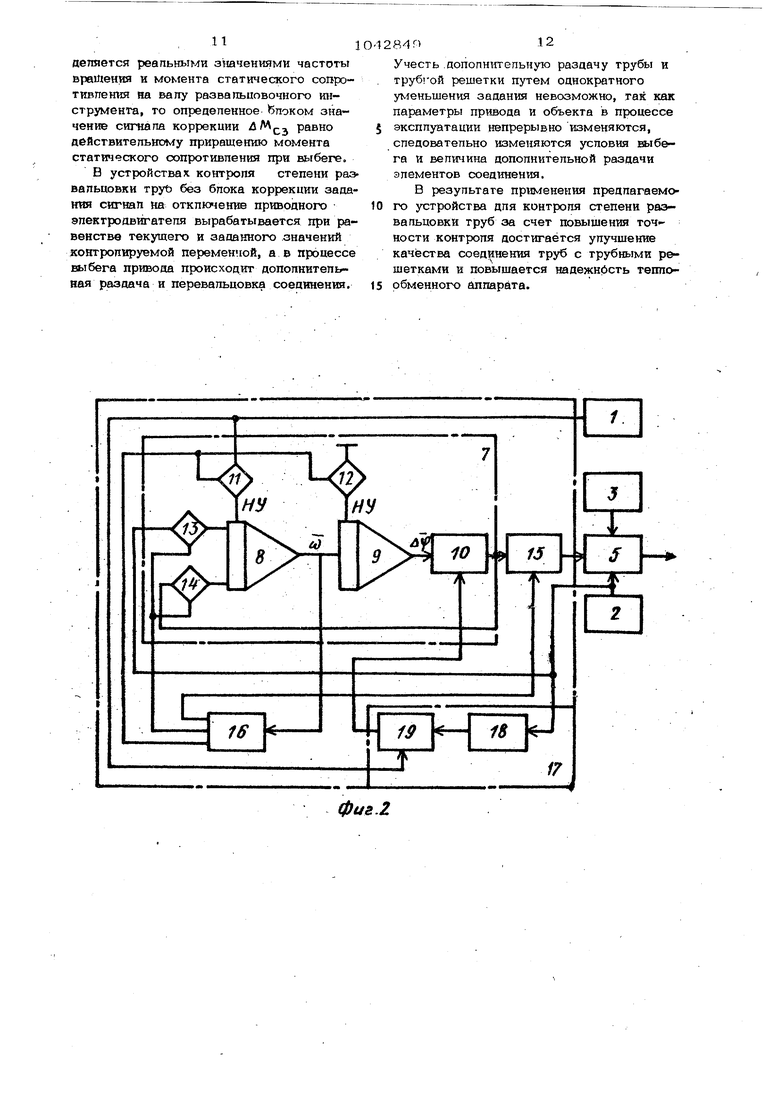
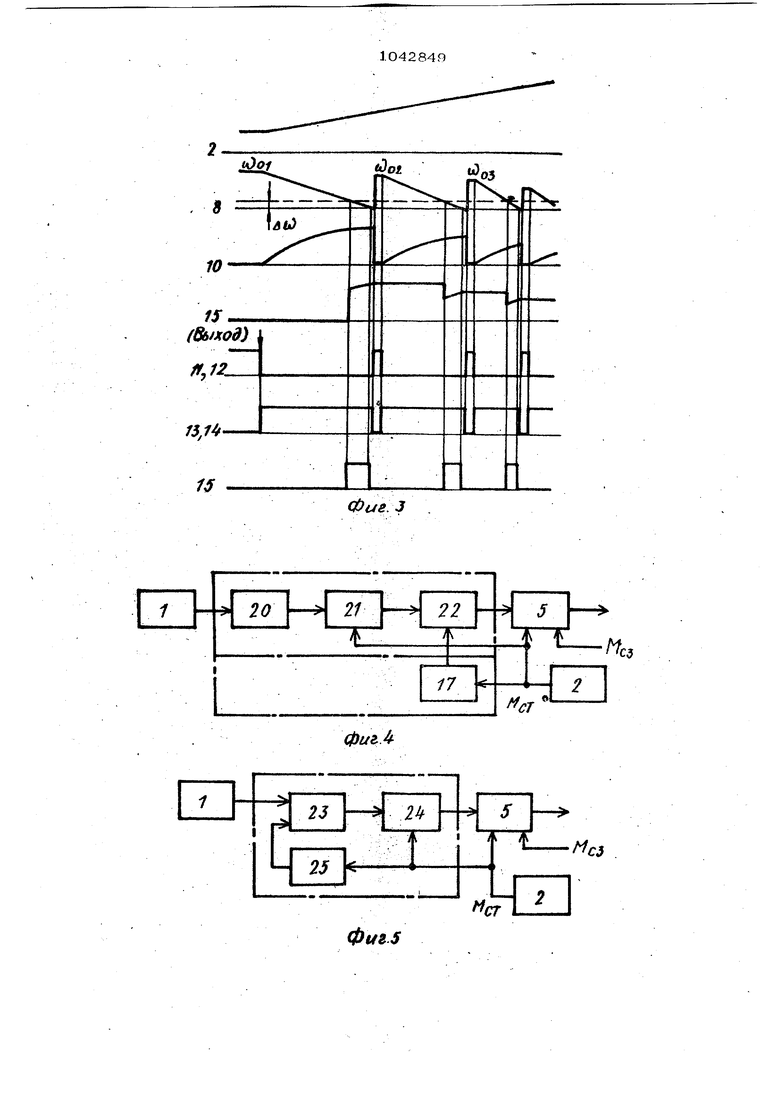
5 момент статического сопротивления соединен с выходом упомянутого Элемента умножения, а выход элемента деления являетсявыходом блока коррекции задания. Модель привода выполнена в виде квадратора и эпементов умножения, депения и дифференцирования, причем датчик частоты-вращения рабочего vopraHa схэединев с входами квадратора и дифференциру клдего элемента, входы элемента яепения квадрата частоты вращения рабочего орга на на производную частоту вращения - с выходами квадратора в дифференцирующег впемента, а входы элемента умножения соединены с выходами элемента депения к анализатора объекта. того, бпок коррекции эадайия выполнен в виде двух дифференцирующих элементов и элементов умножения и деле впая, причем датчик частоты вращения рабочего органа соединен с входом первого дифференцирующего элемента и одним ВЕЗ входов элемента умножения, выход ЯЬрвого дифференцирующего элемента - с входом второго дифференцирующего эле-г меита, входы элемента деления второй производной на первую производную частоты вращения рабочего органа соединены с выходами второго и первого дифференцирующих элементов, а, выход элемента деления- с вторым входом упомя нутого элемента умюэжекия, выход котор го йвпяется выходом блока коррекции заДания. На фиг. 1 изображена блок-схема устройства для контроля степени развальцовки труб; на фиг. 2 и 3 - блок-схема уст ройства с ушшерсальным блоком коррекции задания и диаграмма его работы; на фиг. 4-7 - блок-схемы устройства для различных вариантов выполнения блока коррекции задания. Предлагаемое устройство {фиг. 1) содержит датчик 1 частоты вращения рабочего органа, датчик 2 и зад)атчик 3 момента статического сопротивления на вал рабочего органа, блок 4 коррекции задани компаратор 5 с тремя входами и бпс« 6 , управления привод1а 1м этюктродвигатвпв развапьцовочной машины.. В общем случае блок коррекции задавия выпотгаен (фиг. 2) в виде модепв 7 привода, которая содержит интеграторы 8 и 9, элемент 1О умножения и кгаочи 11-14; Кроме модели привода, бпок коррекшш задания содержит за1юмина1оший элемент 15, формироватепь 16 им пульсов в анализатор 17 объекта (деформируемые элементы соединения), состоящий из дифференцирующего элемевта 18 и элемевта 19 деления. Использован указанного перечня элементов объясняется cr eдyfcm им. Известно, что в двигательном режиме движение привода подчиняется уравнению где Мд, М , М - моменты двигателя, статического сопротивления и динамичеокий, соответственно. При отключении двигателя от сети момент двигатетш становится равный нулю, тьгда ,(1) причемт. -,«(2) ин где Л - момент инерции двигателя и ра&эчего органа; Ч - угловое перемещение рабочего органа; и - угловая частота вращения pa6i чего органа. Креме того, при развапьцовке тру в, трубной рещетке момент сопротивления на валу рабочего органа М пролЬрц рва лен статическому давления на трубу, а угловое перемещение «/ веретена развапьцовочного инструмента пропорцш нашьно относительной деформации €: эПвментов соединения, nostoMy диаграмму развальцовки, задаваемую обычно в координатах Р- е , можно Перевести в координаты , что дает воз г жность записать закон валенення А в общем виде. , с .) где коэффшгаевт пропордвональиэств, являющийся пер «1евиой вепичкн вой в определяемый стадией развапыювки (упругая деформ цин тру, пластическая деформация трубы, сои естная дефор мацвя трубы и решетки) в материался трубы в трубной решетки; Wco звачевве момевта статического сопротивпевия в начале выбега. С учетом (2) в (3) уравиевве (1) кбп в, выполввв двойвое ввтегрированве, получим . ) (5) с вач ьвымв усповвямв it/(0)0 V(0)tUQ Где ,tUQ- частота вращеввя рабочего органа в начале выбега. Дпя опредепения угпа поворота л Ч развапьцовочного инструмента за время выбега tg моаепь привода реализует решение уравнения о поспе чего определяется возможное при выбеге приращение момента статического сопротивления dW - приращение текущего знач&ния момента статического сопротивления за время выбега; величина коррекции задания. Двойное интегрирование в модели привода осуществляется интеграторами 8 и 9. Элементом 1О умножения осуществляется умножение приращения угла поворота А V развальцовочного инструмента на коэффициент пропорциональности К, характеризующий свойства . Запоминающий элемент Т 5 вводится для выборки и хранения значения приращения момента статического сопротивления йМ, соответствующего концу выбега --./ привода при каждом решении уравнения(6 Управление интеграторами, заключаю щееся в обеспечении решения уравнения (6) только в интервале времени O-t. и в периодизации решения, осуществляет ся формирователем 16 импульсов с помощью ключей 11-14. Работа формирователя импульсов в остальных элементов схемы поясняется фй. 3. В исходном состоянии ключи11 и 12 находятся в замкнутом состоянии, обеопечивая подачу на вход начальных усло вий первого интегратора 8 от датчика 1 частоты вращения значения частоты вращения, соответствующего ш и на вход начальных условий второго интегратора 9 зн ачения угла поворота развальцовочного инструмента, равного нулю В это же время ключи 13 и 14 разомкнуты, и входные сигналы интегратора 8 отключены. При подаче команды на одизацию решения ключи 11 и 12 размы каются, а ключи 13 и 14 замыкаются, обеспечивая подачу на один из рабочих входов интегратора 8 сигнала с датчика. 2 мрмента статического сопротивления MC и на второй рабочий вход сигнала К .с выхода элемента 10 умножения. Начинается решение уравнения (б в результате чег« да выходе nejeoro ивтегратора 8 сигнал изменяется в соотватствии с возможным изменением скороо ти CD при отключении привода, а иа выходе второго интегратора 9 в соответствии с возможным изменением угпа пово.рота л развальцовочного инструмента (черта сверху в обозначении переменных введена для того, чтобы различать реальные Переменные си.дЧ от переменных модели привода ш ,f ). В конце выбега при О ш /1 to формирователь 16 импульсов обеспечивает подачу на управляющий вход запоминающего элемента 15 импульса, в результате чего осуществляется считывание в :зап линающий элемент сигнала с выхода элемента 10 умножения, равного , Задним «J OHTOM упомянутого импульса формируются импульсы на управляющие входы ключей 11-14, которые кратковременно отключают рабочие входы интегратора 8 (ключи 13 и 14 кратковременно разлетаются) и подключают на это же время входьг установки начальных условий (ключи 11 и 12 кратковременно замыкаются). В результате на интеграторе 8 устанавливается началь Ное условие, соответствующее новому текущему значению частоты вращения на интеграторе 9 - вновь нулевые на ;чальные условия по Ч. После чего возобновляется решение уравнения (6). Анализатор 17 объекта состоит из элементов дифференцирования 18 и деления 19 и соединен с датчиком 1 частоты вращения и датчиком 2 момента статического сопротивления. Выполнение анализатора объекта в таком виде Объясняет м, что коэффициент пропорциональи К определяется зависимостью,.. 1/ Лс ,. N- dV - ЛЧ Введя промежуточную переменную t получим К,.- | г-IV9 ш так как Ч lu. Б соответствии с формулой (8) анал затор объекта дифференцирует сигнал датч ,ка момента статического сопротивления и затем депит результат на текущее зваченве .чистоты jBpaiueHiffl развальцовочного инструмента, тем самым определяя коэффициент пропорциональности К, Частные случаи выполнения блока коррекции задания основываются на спе дующем. решение уравнения (4) движения привода при выбеге с учетом составляющей kjto , опрецепяющёй вязкое трение в системе, имеет вид .- , (,t). Г ТJ Поспе дифференцироватш (9) получше . Ш(1)|- ( (Ojh W COSyi 5 nyt)4 со ,.,,J, u;(e) i-ir- (o) UJ, , ( Kfycosyt;-buJ sin где ,Р - 2/2lV i AHanvD уравнения (lO) во всем диапазоне юменения его коэффициентов, соответствующих реальным развальцово ным установкам, позволяет считать с точностью 5-10% закон изменения часто ты вращения линейным, т.е. U)(t),. (11 где Ъ - коэффициент пропорциональности Тогда за время выбега развальцовочный инструмент повернется на угол В . (42) w(t)cirt WotgКроме того, из уравнения (11) с учетом выполнения вконце выбега успо.вия ио( tg)O, имеем u o-fetg(13) Дополнительно следует отметить, что блок управления приводным электродвига телем развальцовочной установки может Лж-чкт- .ггтгтtjau в nnwv nanueirPAV ппа быть выполнен в двух вариантах; для реализации непрерывного управления или для реализации импульсного управления, поэтому рассматривают схемы блоков коррекции задания для обоих вариантов. При непрерывном управлении приводным электродвигателем с учетном принятого допущения о линейности функции cu(i), которое полностью выполняется при MC имеем о -f du; J J /«со Тогда 1з уравнений (13) и (14) b uj/ig M o/3. ,(15) Подставляя (13) - (15) в (12), имеем где Wo,A1j,p,K -переменные; J/2 - постоянный коэффициент. Блок коррекции задания, реализующий зависимость (17), приведен на фиг. 4. Он состоит из, модели привода и анализатора 17 объекта. Последний состоит из известных элементов 18 и 19 (фиг.2), соединенных поспедовательно, и предназначен для определения коэффициента k. Модель привода содержит квадратор 20, элемент 21 деления и элемент 22 умножения. Датчик 1 частоты вращения соединен с входом квадратора 2О, даг чик 2 момента статического сопротивления соединен с входом апанализатора 17 объекта и одним из входов элемента 21 деления. На выходе элемента 21 в резуттьтате деления квадрата частоты вращения рабочего органа на момент статического сопротивления имеем сигнал, пропорциональный возможному приращению угла поворота развальцовочного инструмента, а на выходе элемента 22 умножения - сигнал, пропорциональный сигналу коррекции задания лМ Зависимость (17) с учетом (8) принимает вид Э с Блок коррекции задания, реализующий зависимость (18), приведен на фиг. 5. Он содержит элемент 23 умножения, элемент 24 деления и элемент 25 дифферей. цирования. Датчик 1 частоты вращения подключен к одному входу элемента 23 умножения, датчик 2 мсмента статического сопротивления соединен с одним входом элемента 24 деления и через дифференцирующий элемент 25 с другим входом элемента 23 умножения. Кроме того, второй вход элемента 24 деления соединен с выходом элемента 21 умножения, так что на выходе элемента 24 деления формируется сигнал, пропорциональный сигналу коррекции задания .з При импульсном управлении приводнъ1м эпектоодвигателем, заключающемся р 9 пвриодтесхом вкпю1ении и отключении эпектродвигателя, происходит чередование периодов разгона и выбега. Во время вьтбега вдменение частоты вращения рабочего органа описывается уравнением (11 в котором коэффициент Ъ определяется зависимостью -Ь). Шд Шо Ъ li С учетом (19) и (20) уравнение (12) принимает вид (21) .2 Бпрк .коррекций задания, реализующий зависимость (22), приведен на фиг. 6. Он содержит анализатор 17 объекта и модет1ь привода, которая выполнена в BiiH де квадратора 26 и ёпементов: деления 27, умножения 28 и дифференцирования 29. Датчик 1 частоты вращения соединен с входами квадратора 26 и диффере цирующегр эпеиёнта 29 Входы элеме та 27 депенйя соед«нейы с вь1ходами квадра1Ъра 26 и дифференцирукщего элемента 29, так что на выходе элемента 27 деления фо1 4ируется сигнал, пропорци ональный возможному при выбеге приращения угла поворота развальцовочйого инструмента 4 После умножения на элементе 28 указанного сигнала навыходнЪй сигнал анализатора 17 объекта, пропорционального коэффициенту k, на выходе элемента 28 умн жения получают cHTUian, пропорциональный сигнацу коррекции задания 4 Зависимость (В) с учетом того, что коэффициент К при импульсном управлении приводным электродвигателем определяется при выбеге, когда справедливы уравнения (1) и (2), примет вид ; (23) Тогда уравнение (22) пост подставрвки (23) запишется в вще ш ;л(24) 0Блек коррекции задания, реализующий зависимость (24), приведен на фаг. 7. Он содержит два дифференцирующих эпемента 30 и 31, элементы деления 32 и умвожения 33. Датчик 1 частоты вратаеШ1Я соединен с входом первого диффереи пирующего элемента 30 и одним вз элемента 33 умнс«сения. Сигнал с выхода дифференцирующего эпемента 30, пропорпионапьный первой провзвопьвой 849 10 частоты вращения развапьирвочного ш струмента, подается на вход второго дифференцирующего элемента 31 для получения второй производной частоты . щения и на один из входов элемента 32 деления, на второй вход которого подается выходной сигнал дифференцирующего элемента 31, чем обеспечивается деление второй производной частоты вращения на первую производную этой же переменной. Выходной сигнал элемента 33 умНожения пропорционален произведению результата деления на текущую частоту вращения развальаовочного инструмента, и является сигналом коррекции задания Предлагаемое устройство работает следующим образом. При включении блоком 6 управления приводного электродвигателя начинается процесс развальцовки, и одновременно на один из входов KOMnajDaTopa 5 от задатчика 3 момента статического сопроти&ления подается сигнал, пропорциональный заданному значению момента статичеокого сопрогнвленяя М. В процессе развапьиовки датчик 1 частоты вращения измеряет частоту вращения развальповочного инструмента, а датчик -2 момента измеряет текущее значение момента, статического сопротивления Измереннью Переменнь1е Подаются на вхбды блока 4 коррекции задания, который определяет возможное при выбеге за счет запаса кинетической энергии движущихся частей привода приращение текущего значения момента статического сопротивления, принятое за сигнал коррекции задания И АЛ и подаваемое на дополнительный вход; компаратора 5. Таким образбм, на входах компаратора сравниваются скорректировать ный сигнал задания, равный f., и сигнал текущего момента статического сопротивления с. При равенстве этих сигналов компарагор 5 переходит в новое устойчивое положение и вь1ра тывает „ свгнап йа блок 6 управления, вызыван щий отключение приводного электродвигателя от сети. Но движение привода раз- . вальцовочного инструмента и раздача тру бы продол каются еще такое время, за которое происходит приращение момента статического сопротивления на такую величину, что результирующий : текущий момент статического сопротивления буде равен заданному. Поскольку блок 4 коррекции задания ( выполнен с учетом особенностей и параметров привода и развальцовываемых элементов соединения, и работа его опре деляется реальными значениями частоты враШения и момента статического сопротивпення на валу развапьцовочного инструменга, то определенное Споком значение сигнапа коррекции ЛАА. равно действительному приращению момента статического сопротивления при выбеге. В устройствах контроля степени раз вальцовки труй без блока коррекции зада ния сигнал на отключение приводного электродвигателя вырабатывается при равенстве текущего и заданного значений контролируемой переменной, а в процессе выбега привода происходит дополнительная раздача и перевальцовка соединения. 84Г)12 Учесть .допопннтепьную раздачу трубы и труб-ой решетки путем однократного уменьшения задания невозможно, так как параметры привода и объекта в процессе эксплуатации непрерывно изменяются, следовательно изменяются условия выбега и величина дополнительной раздачи элементов соединения. В результате применения предлагаемо го устройства для контроля степени раэвапьцовки труб за счет повышения точности контроля достигается улучшение качества соединения труб с трубными р&шетками и повышается надежность теплообменного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ развальцовки труб в отверстиях трубной решетки | 1980 |
|
SU1031591A1 |
| Устройство для контроля степени развальцовки труб | 1983 |
|
SU1139543A1 |
| Устройство для минимальной защиты электродвигателя | 1989 |
|
SU1728918A1 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Устройство для регулирования силовых параметров и рабочей подачи процесса резания | 1985 |
|
SU1270744A1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| СПОСОБ АДАПТИВНОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2565490C1 |
| Устройство для измерения температуры | 1984 |
|
SU1216670A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 1990 |
|
RU2037173C1 |
1. УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СТЕПЕНИ РАЗВАЛЬЦОВКИ ТРУБ, содержащее датчик частоты врашетш рабочего органа, осуществляющего развалыювку, соединенные с соответствующими двумя входами компаратора задатчик и датчик момента статического сопротивления и подкшоченнь1й к выходу компаратора бпок управления приводным электродвигателем, отличающееся тем, что, с целью повышения точности контроля, оно снабжено блоком коррекции задания, а к компаратору дополнительно подключен выход блока коррекции задания входы же блока коррекции задания соединены с датчиком момента статического с{М1ротивпения и с датчиком частоты вращения рабочегчэ органа.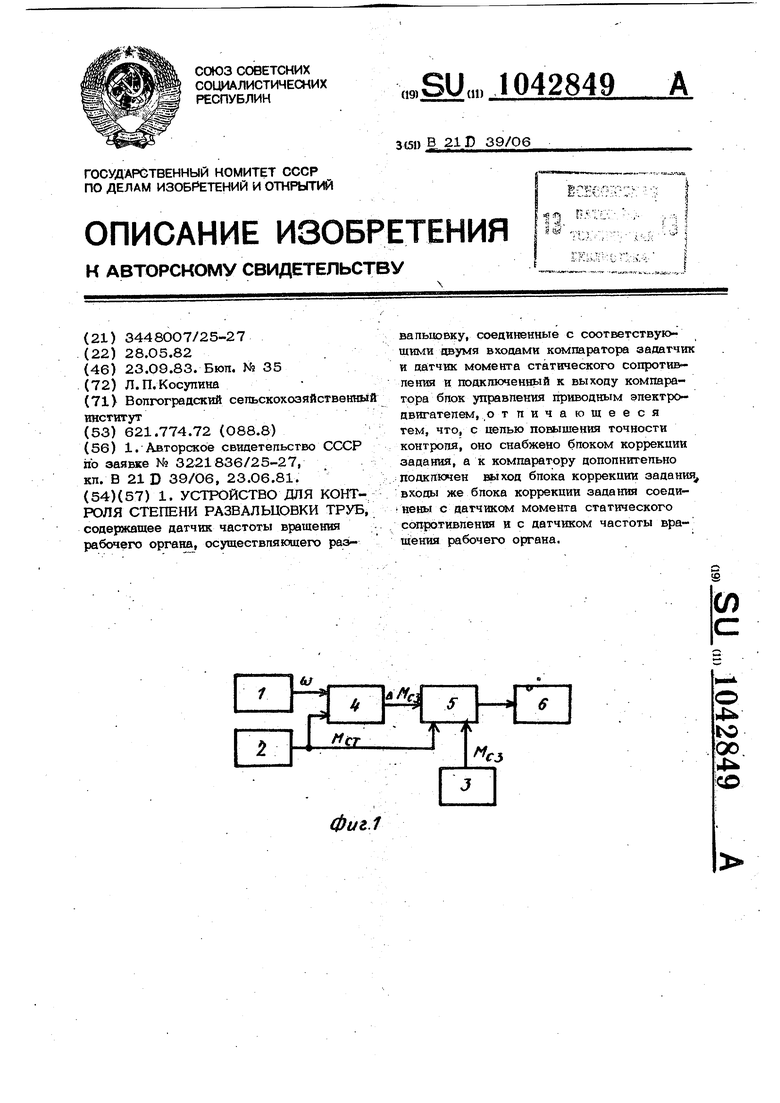
фиг.2
01ц)
03
Фие :5
фиг.Л
ФтЗ
Фиг 6
