1
Изобретение относится к автоматическому управлению металлорежуш;ими станками и предназначено для регулирования силовых параметров и рабочей подачи процесса резанкя.
Цель изобретения - повышение точности устройства регулирования силовых параметров и рабочей подачи процесса резания и расширение области применения устройства.
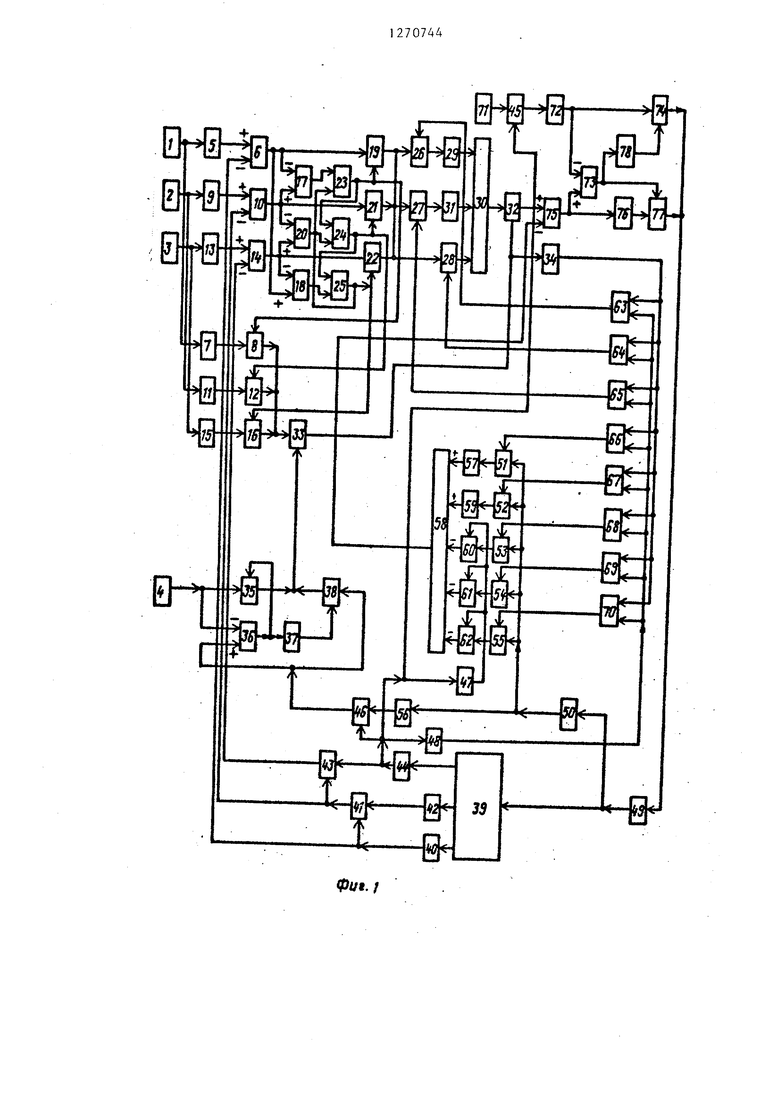
На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг.2 вариант стыковки описываемого устройства со станком с системой программного управления.
Устройство содержит задатчик 1 тангенциальной составляющей силы резания, задатчик 2 момента, задатчик 3 мощности резания, задатчик минимальной оборотной подачи, масштабирующий усилитель 5 первый сумматор 6, первьп масштабирую1 Щй блок 7, первый управляемый ключ 8, второй масштабирующий усилитель 9, второй сумматор 10, второй масштабирующий блок 11, второй управляемый ключ 12, третий масштабирующий усилитель 13, третий сумматор 14, третий масштабирующий блок 15, третий управляемый ключ 16, первый компаратор 17, третий компаратор 18, четвертый управляемый ключ 19, второй компаратор 20, пятый управляемь,1й ключ 21, шестой управляег-1ый ключ 22 первый элемент 2 И-НЕ 23, второй элемент 2 И-НЕ 24, третий элемент 2 И-Н 25, второй 26, третий 27 и четвертый 28 блоки умножения, интегратор 29, четвертый сумматор 30, первый дифференцирующий блок 31, первый блок умножения 32, первый блок; деления 33, первый блок формирования обратной функции 34,, седьмой управляемый ключ 35, четвертый компаратор 36, первый инвертор 37, восьмой управляемый ключ 38, объект регулирования 39, датчик 40 тангенциальной составляющей силы резания,, пятый блок умножения 41/ датчик 42 диаметра, шестой блок умножения 43, датчик 44 частоты вращения, седьмой блок умножения 45, второй блок деления 46, блок управления запаздыванием 47, второй блок формирования обратной функции 48, прявод подачи 49 датчик 50 минутной подачи, восьмой 51, девятый 52, десятьй 53, одиннадцатый 54 и двенадцатый 55 блоки
07442
умножения, сглаживающий блок 56, четвертый масштабируюпу й усилитель 57, пятый сумматор 58, второй дифференцирующий блок 59, первый 60, второй
61 и третий 62 блоки управляемого запаздывания, первый 63, второй 64, третий 65, четвертый 66, пятый 67, шестой 68, седьмой 69 и восьмой 70 нелинейные функциональные преобразо0 ватели, задатчик 71 рабочей обороткой подачи, пятый масштабируки ий усилитель 72, пятый компаратор 73, девятый управляемый хлюч 74, шестой сумматор 75, корректирующий блок 76,
5 десятый управляемьвй ключ 77, второй инвертор 78, систему управления 79, одиннадцатый 80, двенадцатый 81 и тринадцатый 82 управляемый ключи, первый инвертирующий .усилитель 83,
0 четвертый 84 и пятый 85 элементы
2 И-НЕ, четырнадцатый 86 и пятнадцатый 87 управляемые ключи, второй инвертирующий усилитель 88.
Устройство работает следующим
5 образом..
Режим работы устройства, т.е. регулирование одного из силовых параметров или рабочей подачи на оборот, определяется по величинам теку0 щих значений силовых параметров и подачи в соответствии с методами оптимального управления такими объектами по критериям себестоимости или производительности. Выбор одного из трех силовых параметров выполняетс:я таким образом, что осуществляется регулирование силоаого параметра, текущее значение которого наименее отличается от заданного,
Алгоритм реализуется при помощи трех компараторов 17, 18 и 20, трех элементов 2 И-НЕ 23, 24, 25 и ключами с четвертого по шестой 19, 21 и 22, Переключение с регулирования одного
jj из силовых параметров на .регулирование подачи выполняется таким образом: если для регулирования силового параметра на уровне его задания требуется значение подачи на оборот
-„ больше задаваемого задатчиком 71 значения, производится ограничение подачи.
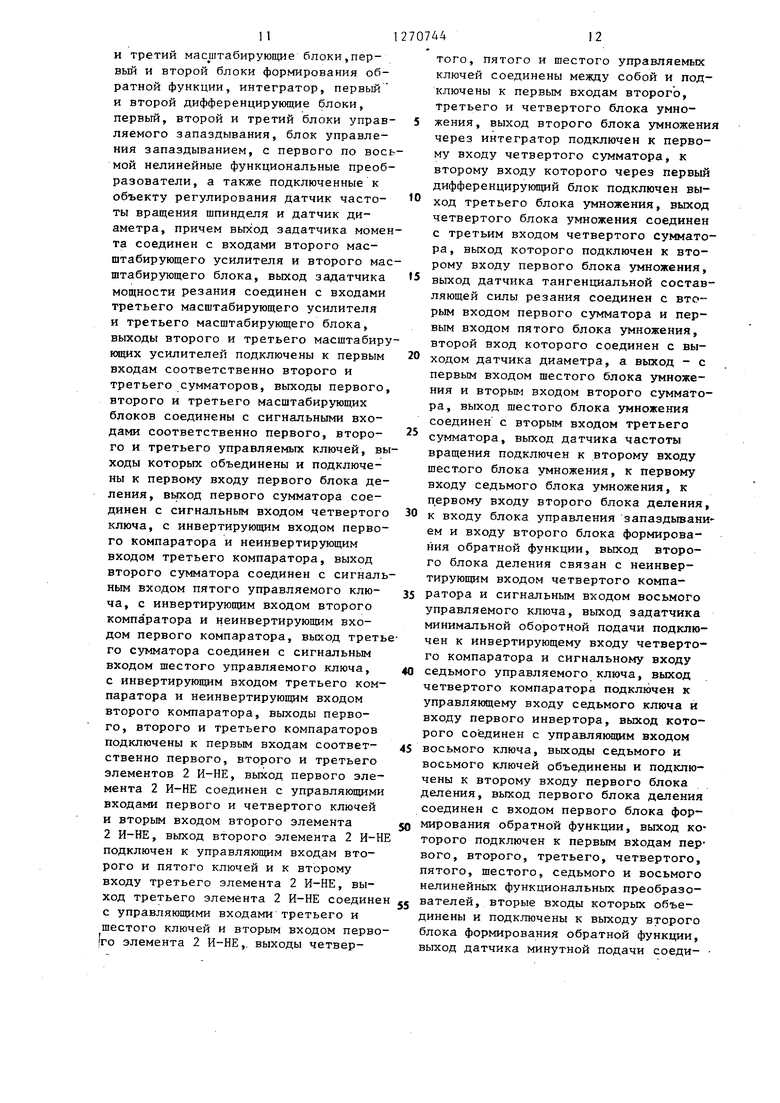
Алгоритм переключения с регулирования подачи на регулирование одно55 го из силовых параметров и обратно реализуется при noMomji пятого компаратора 73, второго инвертора 78, девятого 74 и десятого 77 ключей. 3. Измеренное датчиком 40 тангенциальной составляющей силы резания те кущее значение силы резания поступа ет на инвертирующий вход первого сумматора 6, где вычитается из сигн ла задания, сформированного в задат чике 1 силы резания и прошедшего ма штабирующий усилитель 5. Текущие значения момента и мощно |ти резания получаются путем расчета Величина момента резания опреде:ляется путем умножения в пятом блоке умножения 41 сигнала с выхода датчика тангенциальной составляющей силы резания на сигнал с выхода датчика 42 диаметра и сравнивается во втором сумматоре 10 с сигналом з дания по моменту, полученным с зада чика 2 после прохождения второго масштабирующего усилителя 9. Величи на текущего значения мощности получается на выходе шестого блока умно жения 43 перемножением сигнала с вы хода блока умножения 41 о моменте резания на сигнал с выхода датчика 44 частоты вращения, связанного с объектом регулирования, и сравнивается в третьем сумматоре 14 с сигна лом задания по мощности резания, сформулированным в задатчике 3 мощнести и прошедшим третий масштабиру ющий усилитель 13. Рассогласования на выходе суммат ров 6, 10 и 14 сравниваются тремя компараторами 17, 20 и 18 с целью вьщеления минимального рассогласова ния, при этом состояние логического нуля появляется на выходе соответствукицего элемента 2 И-НЕ 23, 24, 2 и приводит в замкнутое состояние один из ключей 19, 21, 22, который передает сигнал минимального рассогласования на первые входы второго, третьего и четвертого блоков умножения 26, 27, 28. Одновременно вкпю чается один из ключей 8, 12, 16, по дающий сигнал задания, соответствую щий минимальному рассогласойанию и отмасштабированный одним из блоков 7, 11, 15 на первый вход первого блока деления 33. На второй вход первого блока деления поступает, ог раниченный снизу, сигнал, пропорцио нальный текущему значению подачи на ;оборот. Осуществляется это следующим образом. Текущее значение ми|нутной подачи измеряется датчиком ISO и, пройдя сглаживающий блок 56, 744 поступает на второй вход второго блока деления 46, на первый вход которого поступает сигнал, пропор)циональный частоте вращения шпинделя с датчика 44. Текущее сглаженное значение сигнала подачи на оборот поступает на неинвертирующий вход четвертого крмпаратора 36, на инвертирующ ай вход которого поступает значение минимальной подачи на оборот с за/1,атчика4. Результат сравнения вызывает переход в замкнутое состояние седьмого ключа 35 логическим нулем с выхода компаратора, если текущее сглаженное значение подачи на оборот меньше минимального значения, определяемого задатчиком 4 минимальной оборотной подачи, и наоборот, при появлении на выходе инвертора 37 логического нуля замыкается ключ 38, пропускающий текущее значение подачи на вход первого блока деления 33. На выходе первого блока деления 33 образуется сигнал, обратно пропорциональный коэффициенту передачи объекта и ограниченный снизу, который далее поступает на первый вход первого блока умножения 32 и вход первого блока формирования обратной функции 34. Сигналы с выходов третьего 27 и второго 26 блоков умножения, пройдя соответственно первый дифференцирующий блок 31 и интегратор 29, поступают на первый и второй входы четвертого сумматора 30, где суммируются с сигналом с выхода четвертого блока умножения 28. С выхода четвертого сумматора сигнал поступает на второй вход первого блока умножения 32. Сигнал с выхода датчика 50 минутной подачи поступает на первые входы восьмого 51, девятого 52, десятого 53, одиннадцатого 54 и двенадцатого 55 блоков умножения, входящих в цепь местной обратной связи. На вторые входы второго,третьего, четвертого, восьмого, девятого, десятого, одиннадцатого и двенадцатого блоков умножения поступают сигналы с выходов нелинейных функциональных преобразователей 63-70. По сигналам, пропорциональным коэффициенту передачи объекта и запаздьшанию в объекте, поступающим с выходов блоков формирования обратных функций 34 и 48, преобразователи устанавливают оптимальные значения коэффициентов передачи указанныхблоков умножения 26, 27, 28, 51-55. Сигнал с выхода восьмого блока 5 умножения, пройдя четвертый масштабирующий усилитель 57 j, поступает на первый вход пятого сумматора 58, где алгебраически суммируется с сигналами с выходов второго дифференцирующего блока 59 и блоков упраЕляем го запаздывания 60, 61 и 62,, на входы которых поступают соответстЕ:утощие сигналы от блоков умножения 52-55. С выхода пятого сумматора сигнал ме ной обратной связи приходит на инвертирующий вход шестого сумматора 75, С выхода шестого сумматора 75 ал гебраическая сумма сигналов от первого блока 32 умножения и пятого сумматора 58 поступает на вход кор,ректирующего блока 76 и неинвертиру ющий вход пятого компаратора 73. На инвертирующий вход пятого компарато ра 73 поступает сигнал с выхода пятого масштабирующего усилителя 72, пропорциональный заданному значению минутной подачи, которое определяется путем перемножения в блок1В умножения 45 сигналов задания рабочей оборотной подачи с выхода задатчика 71 и сигнала с выхода датчика 44 частоты вращения. Результат сравнения сигналов в пятом компараторе 73 приводит к включению либо девятого ключа 74, либо десятого ключа 77. При наличии логического нуля на выходе пятого компаратора 73, что соответствует регулированию силового параметра, замыкается ключ 77, наличие логической единицы на выходе компаратора 73 приводит к включению ключа 74 за счет инверсии сигнала управления инвертором 78. Вьжоды ключей 74 и 77 подключены к входу привода 49 подачи, определяющего текущее значение минутной и оборотной подач, посредством чего обеспеч вается управление объектом регулиро вания процессом резания - регулир вание либо одного из силовых параметров процесса резания, либо рабочей подачи на оборот при резании. Блоки 33 и 32 деления и умножения аналогично прототипу позволяют компенсировать влияние изменения коэффициента передачи объекта на коэффициент передачи разомкнутого онтура регулирования. Поскольку стройство позволяет регулировать три силовых параметра, каждый из которых оказывает собственное влияние на коэффициент передачи разомкнутого контура, доя вычисления величины, обратной коэффициенту передачи объекта регулирования, используются отмасштабированные величины задающих сигналов каждого из силовых регулируемых параметров. В зависимости от типа регулируемого параметра в блоке 33 производится деление сглаженного .значения оборотной подачи на отмасштабированные задания по силе, моменту или мощности резания, переключение которых обеспечивается работой ключей 8, 12 и 16. Сигнал подачи перед поступлением на вход блока 33 сглаживается аналогично прототипу, но затем ограничивается снизу прн помощи блоков 4, 35, 36, 37, 38. Ограничение позволяет избежать разрыва цепи сигнала, поступающего на привод. Ограничение сигнала, поступающего на вход блока 33, приводит к неточной компенсации изменений коэффициента передачи объекта при подачах на оборот меньших величины,определяе- . мой блоком 4, однако величина минимальной оборотной подачи в задатчике Д может быть выбрана достаточно малой, исходя из конкретных границ изменения коэффициента передачи объекта в данном процессе, UTO обеспечивает достаточно точную к рмпенсацию и не приводит к разрыву цепи сигнала к приводу. Минимальная оборотная подача в задатчике 4 может быть выбрана также, исходя из соображений физической осуществимости процесса резания, кото- рый, как известно, возможен, начиная с некоторой минимальной подачи. Состояние компаратора 36 в предлагаемом устройстве может быть использовано для диагностики степени износа инструмента, поскольку при большом износе время нахождения компаратора Б состоянии, соответствующем ограничению сигнала, будет больше, чем при острозаточенном резце. Коэффициенты передачи составляющих ПИД-регулятора, который образуют блоки 26-31, и цепи местной обратной связи (мое), в которую кроме блоков умножения 51-55 входят блоки управляемого запаздывания 60, 61 и 62, пятый масштабирующий усилитель 57, второй дифференцирующий блок 59 и пятый сумматор 58, могут быть опре делены в зависимости от величины за паздывания и коэффициента передачи объекта из результатов синтеза управлений по квадратичному критерию качества для неизменяемой части, состоящей из регулятора,привода,объек та и датчика силы резания. Параметр регулятора и цепи МОС при этом вычи ляются из решения матричного дифференциального уравнения Риккати. Основной задачей, решаемой цепью МОС в устройстве, является снижение нежелательного влияния запаздывания в объекте на качество процессов в устройстве. Образуемый при замыкани цепи ШС контур должен быть устойчи независимо от внешнего контура, содержащего объект регулирования, что может быть достигнуто с помощью последовательно корректирующего блока 76, включаемого перед приводом. Структура и параметры последователь ной коррекции могут быть выбраны пу тем анализа устойчивости контура с ШС по критерию Найквиста. Поскольку основными критериями качества работы для таких устройств как предлагаемое являются себестоимость или производи Тельность обработки, окончательный синтез или настройку устройства следует выполнять по указанным критери:ям, например по результатам испытани в прсУизводстве. Блоки запаздывания, входящие в цепь МОС, как следует из результатов синтеза должны управляться таким образом, что величины запаздываний бло ков 60, 61 и 62 должны относиться к величине запаздывания в объекте как 1, 1/2, 1/3. Поскольку HOC в устройстве охваты вает только привод и Корректирующий блок и не охватывает объект., легко обеспечивается устойчивость устройст ва и высокая точность регулирования силовых параметров процесса резания и рабочей подачи при изменяющихся технологических условиях. Точность регулирования силовых параметров может быть повьшена практически более чем на порядок по сравнению с известными устройствами. Предложенная структура устройства обеспечивает также малые динамические погреш ости регулирования подачи при переключении режимов регулирования. Наличие связей через нелинейные функциональные преобразователи приводит только к повьшению точности регулирования и не ухудшает устойчивость устройства, так как законы этих связей определяются законами изменения оптимальных настроек регулятора и цепи МОС по результатам аналитического синтеза по уравнению Риккати. Возможность точного регулирования силовых параметров и подачи при резании и автоматическое переключение режимов при изменении технологических условий обеспечивают широкие функциональные возможности устройства. Динамическое поведение устройства может быть описано следующим образом. При очень малой глубине резания устройство обеспечивает подачу на оборот, определяемую ограничением по шероховатости, при этом замкнут девятый ключ 74 и величины задания по подаче поступает на привод г Сигналы, пропорциональные силе, моменту и мощности резания, сравниваются с величинами сигналов заданий по этим параметрам, минимальное рассогласование по одному из параметров при этом поступает на вход ПИД-регулятора, проходит первый блок умножения 32, шестой сумматор и поступает на вход компаратора 73 и вход корректирукщего блока 76. При изменении технологических условий, например увеличении глубины резания, сигналы рассогласований и сигнална входе компараторй 73 уменьшаются, и при сравнении сигналов с выходов блоков 75 и 72 происходит- переключение на регулировав ние силовых параметров. В зависимости от сочетания величин силы резания, диаметра и частоты вращения регулируется тот или иной силовой параметр. При отработке ступенчатых возмущений в интервале О- v/З устройство функционирует без положительной обратной связи через блоки запаздывания, только с отрицательной связью через блоки 57 и 59. На интервалах и/З-И/г,(И при времени процесса больше появляются задержанные сигналы положительной обратной связи и устройство точно и плавно выходит в установившееся состояние. Преимуществом устройства является отсутствие прямой или обратной модели объекта и снятие сигнала обратной связи, резко улучшающей качество регулирования, с входа объекта, т.е. по подаче. Блоки запаздывания могут быть выполнены на аперио дических звеньях с регулируемой постоянной времени, что обеспечивает простоту реализации устройства. Блок формирования обратной функции представляет собой блок деления, на один вход которого подается единичный постоянный сигнал, а на второй вход величина, обратное значение которой определяется. При аппаратной реализации блоков умножения и деления они могут быть выполнены на интегрсшьных микросхемах - аналоговых умножителях При необходимости стыковки предла гаемого устройства со станком с системой программного управления, например системой ЧПУ, может возникнуть необходимость блокировки устройства для реализации ускоренных п дач приводом, используемым в устрой стве. Блок-схема варианта устройства, позволяющего осуществить, такую стыковку, представлена на фиг.2, причем данный вариант позволяет также работать при двух направлениях движения,подачи. Сигналы задания ускоренной подачи Sy, блокировки & устройства и реверса Р движения под чи должны обеспечиваться системой управления 79. Введенные дополнител но блоки имеют позиции 80-88, блоки имеющие позиции 1-78, соответствуют описанию устройства, приведенному на фиг. 1. Устройство переводится в активное состояние при наличии логической еди ницы на выходе блокировки Ь систеNOJуправления 79. Ключ 80 оказывается разомкнут, и задание ускоренной подачи Sji отключено от приво да 49. Вход привода подключен через один из ключей 81 и 82 к выходам ключей 74 и 77, при этом в цепи ключа 81 имеется инвертирующий усилитель 83, позволяющий при активном устройстве по команде с выхода Р системы управления 79 осуществля реверс подачи. Управление ключами 8 81 и 82 выполняется от двух элементов 2 И-НЕ 84 и 85. Реверс знака 450 подачи, необходимость в котором может возникнуть при обработке наружных и внутренних поверхностей, осуществляется при наличии логической единицы на выходе Р системы управления 79. Для сохранения знака обратной связи в устройство по фиг.2 введены также ключи 86 и 87 и второй инвертирующий усилитель 88. Ключи 86 и 87 включаются в соответствии с ключами 81 и 82. При ускоренных пйдачах сигнал блокировки отключает такж датчик 50 минутной подачи от цепи местной обратной связи. Реализация устройства позволяет обеспечить точное регулирование ос- новных параметров и рабочей подачи в статике и динамике процесса резания, оптимальное в смысле критериев производительности или себестоимости обработки. Формула изрб Р е т е н и Я Устройство для регулирования силовых параметров и рабочей подачи процесса резания, содержащее задатчик тангенциальной составляющей силы резания, соединенный выходом с входами первого масштабирукяцего блока и первого масщтабирующего усилителя, выход которого подключен к первому входу первого сумматора, первый блок деления, выход которого соединен с первым входом первого блока умножения, корректирующий блок, привод подачи, механически связанный с объектом регулирования, к которому подключен датчик тангенциальной составляющей силы резания, и с датчиком минутной подачи, выход которого соединен с входом сглаживающего блока, отличающеес я тем, что, с целью повьшгения точности устройства и расщирения области его применения, в него введены задатчик момента, задатчик мощности резания, задатчик рабочей оборотной подачи и задатчик минимальной оборотной подачи, второй блок деления, с второго по пятый масштабирующие усилители, с второго по шестой сумматоры, с первого по пятый компараторы, с первого по третий элементы 2 И-НЕ, с второго по двенадцатый блоки умножения, с первого по девятый управляемые ключи, первый и второй инверторы, второй и третий масштабирующие блоки,первый и второй блоки формирования обратной функции, интегратор, первый и второй дифференцирующие блоки, первый, второй и третий блоки управ ляемого запаздывания, блок управления запаздыванием, с первого по вос мой нелинейные функциональные преоб разователи, а также подключенные к объекту регулирования датчик частоты вращения шпинделя и датчик диаметра, причем выход задатчика моме та соединен с входами второго масштабирующего усилителя и второго ма штабирующего блока, выход задатчика мощности резания соединен с входами третьего масштабирующего усилителя и третьего масщтабирующего блока, выходы второго и третьего масштабир кяцих усилителей подключены к первым входам соответственно второго и третьего сумматоров, выходы первого второго и третьего масштабирующих блоков соединены с сигнальными входами соответственно первого, второго и третьего управляемых ключей, в ходы которых объединены и подключены к первому входу первого блока де ления, выход первого сумматора соединен с сигнальным входом четвертог ключа, с инвертирующим входом перво го компаратора и неинвертирующим входом третьего компаратора, выход второго сумматора соединен с сигнал ным входом пятого управляемого ключа, с инвертирующим входом второго компаратора и неинвертирующим входом первого компаратора, выход трет го сумматора соединен с сигнальным входом шестого управляемого ключа, с инвертирующим входом третьего компаратора и неинвертирующим входом второго компаратора, выходы первого, второго и третьего компараторов подключены к первым входам соответственно первого, второго и третьего элементов 2 И-НЕ, выход первого элемента 2 И-НЕ соединен с управляклцими входами первого и четвертого ключей и вторым входом второго элемента 2 И-НЕ, выход второго элемента 2 И-Н подключен к управляющим входам второго и пятого ключей и к второму входу третьего элемента 2 И-НЕ, выход третьего элемента 2 И-НЕ соедине с управляющими входами третьего и шестого ключей и вторым входом перво го элемента 2 И-НЕ,. выходы четвертого, пятого и шестого управляемьсх ключей соединены между собой и подключены к первым входам второго, третьего и четвертого блока умножения, выход второго блока умножения через интегратор подключен к первому входу четвертого сумматора, к второму входу которого через первый дифференцирующий блок подключен выход третьего блока умножения, выход четвертого блока умножения соединен с третьим входом четвертого сумматора , выход которого подключен к второму входу первого блока умножения, выход датчика тангенциальной составляющей силы резания соединен с вторым входом первого сумматора и первым входом пятого блока умножения, второй вход которого соединен с выходом датчика диаметра, а выход - с первым входом шестого блока умножения и вторым входом второго сумматора, выход шестого блока умножения соединен с вторым входом третьего сумматора, выход датчика частоты вращения подключен к второму входу шест-ого блока умножения, к первому входу седьмого блока умножения, к первому входу второго блока деления, к входу блока управления запаздьшани ем и входу второго блока формирования обратной функции, выход второго блока деления связан с неинвертирующим входом четвертого компаратора и сигнальным входом восьмого управляемого ключа, выход задатчика минимальной оборотной подачи подключен к инвертирующему входу четвертого компаратора и сигнальному входу седьмого управляемого ключа, выход четвертого компаратора подключен к управляющему входу седьмого ключа и входу первого инвертора, выход которого соединен с управляющим входом восьмого ключей объединены и подключены к второму входу первого блока деления, выход первого блока деления соединен с входом первого блока формирования обратной функции, выход которого подключен к первым входам первого, второго, третьего, четвертого, пятого, шестого, седьмого и восьмого нелинейных функциональных преобразователей, вторые входы которых объеинены и подключены к выходу второго блока формирования обратной функции, выход датчика минутной подачи соединен с первыми входами восьмого, девятого, десятого, одиннадцатого и двенадцатого блоков умножения, выход сглаживающего блока подключен к дторому входу второго блока деления, выход восьмого блока умножения через четвертый масштабирующий усилитель соединен с первым входом пятого сумматора, выход девятого блока умножения через второй дифференцирующий блок соединен с вторым входом пятого сумматора, выход десятого блока умножения подключен к сигнальному входу первого блока управляемого запаздывания, выход которого соединен с третьим входом пятого сумматора, выход одиннадцатого блока умножения подключен к сигнальному входу второго блока управляемого запаздывания, выход которогосоединен с четвертым входом пятого сумматора, выход двенадцатого блока умножения подключен к сигнальному входу третьего блока управляемого запаздывания, выход которого соединен с пятым входом пятого сумматора, выход пятого сумматора подключен к первому входу шестого сумматора, второй вход которого подключен- к выходу первого блока ум1ножения, управляющие входы блока управляемого запаздывания объединены и подключены к выходу блока управления запаздыванием, выходы первого, второго и третьего нелинейных функциональных преобразователей подключены к вторым входам соответственно второго, четвертого и третьего блоков умножения, выходы нелинейных функциональных преобразователей с четвертого по восьмой подключены к вторым входам соответственно с восьмого по двенадцатый блоков умножения выход задатчи рабочей рборотной подачи соединен с вторым входом седьмого блока умножения, выход которого через пятый масштабирующий усилитель подключен к сигнальному вхду девятого ключа и инвертирующему входу пятого компаратора, неинвертирукяций вход которого подключен к выходу шестого сумматора и входу корректирующего блока, .выход которого соединен с сигнальным входом десятого управляемого.ключа, выход пятого компаратора соединен с управляющим вхо дом десятого ключа и через второй инвертор - с управлякицим входом девятого ключа, выходы девятого и десятого управляемых ключей объединены и подключены к входу привода подачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2014 |
|
RU2542910C1 |
| РЕГУЛЯТОР | 1990 |
|
RU2015520C1 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| АДАПТИВНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ПРОЦЕССА КОНТРОЛЯ НА МЕТАЛЛОРЕЖУЩЕМ СТАНКЕ | 1990 |
|
RU2042168C1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ СИЛОВЫХ ПАРАМЕТРОВ ПРОЦЕССА РЕЗАНИЯ | 2010 |
|
RU2429960C1 |
| Интерполирующий фильтр | 1985 |
|
SU1241421A2 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2011 |
|
RU2457528C1 |
| Устройство для коррекции массы кокса | 1987 |
|
SU1534057A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |

Изобретение предназначено для регулирования силовых параметров и подачи при управлении металлорежущим станком. Цель изобретения - повышение точности устройства регулирования силовых параметров процесса резания и расширение области применения устройства. Устройство содержит объект регулирования, привод подачи, датчик минутной подачи и датчик тангенциальной составляющей силы резания, первый сумматор, задатчик тангенциальной составляющей силы резания, первый масштабирующий усилитель, сглаживающий блок, первый блок умножения и первьш блок деления. Новым в предлагаемом устройстве для ре:гулирования силовых параметров и рабочей подачи процесса резания является то, что в него введены задатчики момента и мощности резания, рабочей и минимальной подачи на оборот, датчики диаметра, частоты вращения и минутной подачи, а также блоки умножения, позволяющие рассчитывать текущие значения указанных силовых параметров , сумматоры для получения рассогласований по каждому параметру, схемы компарирования рассогласований и ключи для.подключения минимального рассогласования на вход с регулятора коэффициенты передачи которого и введенной местной обрат(/ ной связи с элементами управляемого запаздывания подстраиваются в процессе работы по сигналам от функциональны : преобразователей, получающих информацию о запаздывании в объекте, а также коэффициенте его ю передачи от цепи компенсации влияния изменений коэффициента передачи объекта на коэффициент передачи контура регулирования, позволяющей с помощью задатчика минимальной оборотной подачи, компаратора и ключей l: избежать разрыва цепи задания на привод, что в целом обеспечивает широкую область применения устройства и точное в статике и динамике оптимальное регулирование объекта. 2 ил.
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОДОЛЬНОЙ ПОДАЧЕЙ ТОКАРНОГО СТАНКА | 0 |
|
SU406644A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система автоматического регулирования для объектов с запаздыванием | 1974 |
|
SU538339A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для регулирования силовых параметров процесса резания | 1980 |
|
SU875335A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
