умножения, выход пятого задатчика подключен через второй блок сравнения к вторым входам третьего и че вертого бло1Гов памяти, к управляю«им входам первого и второго переключателей, выход первого блока сравнения соединен с вторым входом первого переключателя и через второ блок онределения модуля - с вторым входом второго блока сравнения, выход третьего блока сравнения подключен к второму входу второго перег ключдтеля, выход седьмого блока, сравнения- подключен через первый блок памяти к .второму входу тринадцатого блЬка сравнения, выход которого подключен к первому входу ограничителя, выход восьмого блока сравнения через второй блок памяти - к первому входу десятого блока сравнения, второй вход которого подключен к выходу блока реализации экспоненциальной зависимости, а выход - к второму входу ограничителяУ выход девятого блока сравнения, соединен через обратную модель
объекта с вторым входом шестого блока сравнения и через последовательно включенные первый квадратор, третий фильтр низкой частоты, одиннадцатый блок сравнения и логический блок И - с управляющим Ъходом ключа, выхЬд первого экстраполятора соединенчерез последовательно включенные четвертый .блок задержки, четвертый блок сравнения, второй квадратор, четвертый фильтр низкой частоты и двенадцатый блок сравнения с вторым входом элемента И, выход шестого бдока сравнения соединен с вторым входом четвертого блока сравнения, выходы шестого и седьмого задатчиков соединены с вторыми входами соответственно одиннадцатого и двенадцатого блоков сравнения, выход первого сумматора подключен к третьему Входу ограни.чителя, выход интегратора - к дополнительному входу обратной модели объекта, выход генератора пробных сигнёшов соединен через ключ с вторым входом первого сумматора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная двухцелевая система управления | 1982 |
|
SU1100608A1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Система регулирования объекта с запаздыванием | 1986 |
|
SU1397875A1 |
| Регулятор | 1982 |
|
SU1037208A1 |
| Адаптивное регулирующее устройство | 1982 |
|
SU1064271A1 |
| Регулятор | 1981 |
|
SU945849A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| Адаптивная система регулирования процесса контроля | 1985 |
|
SU1278808A1 |
АДАПТИВНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С НЕСТАЦИОНАРНОЙ ХАРАКТЕРИСТИКОЙ, НАПРИМЕР, ДУГОВОЙ СТАЛЕПЛАВИЛЬНОЙ ПЕЧИ, содержащая исполнительный орган, два датчика, четыре фильтра низкой частоты, два блока задержки, четыре блока сравнения, генератор пробных сигналов, последовательно включенные, первый блок умножения, пятый блОк сравнения, второй блок умножения, блок деления и интегратор, последовательно включенные шестой блок сравнения, первый экстраполятор и первый сумматор, первый, второй, третий и четвертый Зсщатчики, выходы которых по;п1ключены соответственно к первым входам седьмого, восьмого и девятого блоков сравнения и второго сумматора, первый блок определения модуля, выход которого через второй сумматор соединен с вторым входом блока деления, сиунум-реле, выход которого соединен с вторым входом второго блока умножения, выход объекта управления соединен через последовательно включенные второй и второй . фильтр низкой частоты с первым входом третьего блока сравнения, выход исполнительного органа соединен с входом объекта управления И через первый датчик с входом первого фильтра низкой частоты, выход интегратора соединен с-первым входом первого блока умножения, отличающаяся тем, что, с целью повышения точности регулирования, в нее введены пятый, шестой и седьмой задатчики, второй и третий экстраполяторы, обратная модель объекта, два квадратора, элемент И, третий и четвертый блоки задержки, четыре блока памяти, десятый, одиннадцатый и двенадцатый блоки сравнения, второй блок определения модуля, первый и второй переключате(О ли, ключ, последовательно включенные таймер, блок реализации экспоненциальной зависимости, тринадцатый блок сравнения и ограничитель, выход которого соединен с входом исполнительного органа, выход второго фильтра низкой частоты соединен с вторыми входами седьмого, восьмого и девятого блоков сравнения, с входом третьего экстраполятрра, выход а которого соединен через последовательно включенные второй блок за00 00 держки, третий блок сравнения, четвертый блок памяти и второй переключатель с вторым входом пятого , со блока сравнения, выход первого фильтра низкой частоты подключен к первым входам первого и второго блоков , первого блока сравнения, через первый блок задержки к первому входу шестого блока сравнения, через последовательно включенные второй экстраполятор, третий блок задержки, первый блок срав.нения, третий блок памяти и первьгй переключатель - к входам первого блока определения модуля, сигнумреле и второму входу первого блока
. . 1
Изобретение относится к автоматическому управлению и регулированию, в Частности, к адаптивньв системам регулирований, и может быт использовано для построения систем регулирования техническими объектами, которые описываются последовательным соединением звена чистого запаздывания и инерционного эвена первого порядка с изменяющимс коэффициентом усиления (передачи). Объекты подвержены влиянию неконтролируемых внешних воздействий, структурно-статистические свойства которых существенно изменяются на интервале времени запаздывания.
Примером такого класса объектов является дуговая сталеплавильная электрическая печь, если рассматривать задачу регулирования ее электрического режима. Регулирующим воздействием в этом случае является перемещение электродов, а выходной переменной объекта - ток или электрическая мощность печи. Коэффици.ент передачи указанного канала регулирования -изменяется по ходу пЛавки в 2-3 раза. Объект подвержен влиянию нестационарных неконтролируемых возмущений, обусловленных, в частности, изменениями параметixjB шихты и питающего напряжения.
Задача регулирования заключается в обеспечении инвариантности выходной переменной отизменений внешних воздействий и коэффициента усиления объекта управления.
Известна адаптивная система регулирования электрического режима дуговой электропечи, содержащая последовательно включенные дуговую электропечь, блок определения производной регулируемой переменной,
0 блок деления, блок формирования сигнала коррекции, регулятор и блок определения производной управляющего воздействия, причем выход дуговой электропечи соединен с вторым
5 входом регулятора, выход которого подключен к входу дуговой электропечи, выход блока определения проi изводной управляющего воздействия соединен с вторым входом блока деления СИ.
Недостатком системы.является низкая точность регулирования, обусловленная тём, что при коррекции настроек регулятора не учитывается запаздывание в канале регулирования И производится деление производной регулируемой переменной на производную управляющего воздействия, определенные в одни момент 0 времени. Кроме того, не учитываются измерительные помехи, что ведет к большим Ошибкам при определении производных.
Наиболее близкой к предлагаемой является адаптивная система экстремального регулирования, содержащая последовательно включенные объект управления, первый датчик, первый фильтр низкой частоты, первый блок сравнения, второй фильтр низкой частоты, третий блок сравнения, четвертый блок сравнения, первый блок умножения, блок деления, интегратор пятый блок сравнения, первый масштабирующий блок, шестой блок сравнения, экстраполятор, первый сумматор, исполнительный орган, второй датчик, третий фильтр низкой частоты, седьмой блок сравнения, первый блок задержки, четвертый Фильтр низкой частоты, восьмой блок сравнения и второй блок умножения, выход которого соединен с вторым входом четвертого блока сравнения, последовательно включенные третий датчик,, пятый фильтр низкой частоты девятый блок сравнения, второй масштабирующий блок, второй сумматор, второй блок задержки и третий масштабирующий блок, выход которого соединен с вторым входом первого блока сравнения,, последовательно включенные четвертый датчик, шестой фильтр низкой частоты, десятый блок сравнения и третий масштабирующий блок, выход которого соединен с вторым входом второго сумматора и через первый блок адаптации со своим дополнительным входом, выход первого масштабирующего блока соединен через второй блок адаптации со своим дополнительным входом, выход второго сумматора,соединен с вторым входом седьмого блока сравнения и вторым входом первог сумматора, третий вход которого подключен к выходу генератора пробных сигналов, выход четвертого фильтра низкой частоты соединен с вторым входом шестого блока сравнения, выход которого подключен к вторым входам первого, второго.и третьего блоков адаптации, первый вход третьего блока адаптации соединен с выходом экстраполятора, а выход с дополнительным входом экстраполятоЕ а, выход восьмого блока сравнения соединен через сигнум-реле с вторым входом первого блока умножения, через блок выделения модуЛя и третий сумматор - с вторым входом блока деления, выход интегратора подключен к второму входу второго блока умножения, выходы первого, второго, третьего и чет- вертого задатчиков соединены с вторым входами соответственно девятого, десятого, первого блоков срав-г нения и третьего сумматора, выход первого блока сравнения подключен к вторюму входу третьего б.лока срав
нения, выход первого блока задержки - к .второму входу восьмого блока сравнения, второй выход объекта .управления - к входу четвертого датчика, первый вход объекта управления - к выходу исполнительного органа, второй вход - к входу второго
датчика Г21.
В известной адаптивной системе регулирования из целевой выходной переменной объекта управления вычитаются -эффекты изменений контролируемых внешних воздействий и косвенной выходной переменной, затем определяются приращения скорректированной целевой выходной переменной и управляющего воздействия относитель-г но их текущих средних значений. По рассчитанным приращениям оценивает-ся знакопеременный коэффициент экстремального объекта управления. С использованием знакопеременного -. коэффициента и текущего среднего знчения управляющего воздействия определяются Tpe6yeNttiie управляющие воздействия на прошедших интервалах времени. Требуемые -управляющие воздействия экстраполируются на предстоящие интеовалы управления, алгебраически суммируются с корректировками по изменениям контролируемых внешних воздействий и пробными сигналами и направляются на реализацию в исполнительный орган.
Недостаток известной адаптивной системы при ее использовании для рассматриваемого классаобъектов является низка точность регулирования, обусловленная тем, что не учитываются динамические свойства . объекта из-за усреднения переменных на большом интервале времени, и. тем, что постоянно осуществляется подача пробных сигналов.
изобретения - noBbmjeHHe точности регулирования.
поставленная цель достигается те что в адаптивную систему регулирования, содержащую исполнительный орган, два датчика, четыре фильтра низкой частоты, два блока задержки, четыре блока сравнения, генератор пробных сигналов, последовательно включенные первый блок умножения, пятый блик сравнения, второй блок умножения, блок деления и интегратор, последовательно включенные шестой блок сравнения, первый экстраполятор и первый сумматор, первый второй, третий и четвертый задатчики, выходы которых подключены соответственно к первым входам седьмогоj восьмого и девятого блоков сравнения и второго сумматора, первый блок определения модуля, выход которого через второй суммато соединен с вторым входом блока деле ния, сигнум-реле, выход которого
соединен с вторым входом второго блока умножения, выход объекта управления соединен через последовательно включенные второй датчик и второй фильтр низкой частоты с первым входом третьего блока сравнейия, выход исполнительного органа соединен с входом объекта управления и через первый датчик с входом первого фильтра низкой частоты, выход интегратор а соедине с первым входом первого блока умножения, введены ПЯТЫЙ, шестой и задатчики второй и третий экстраПоляторы, обратная модель объекта, два квадратора, логически блок И, третий и четвертый блоки задержки, четыре блока памяти, десятый, одиннадцатый и двенадцатый блоки сравнения, второй блок опредления модуля, первый и второй переключатели, ключ, последовательно включенные таймера, блок реализации экспоненциальной зависимости, тринадцатый блок сравнения и ограничитель, выход которого соединен с входом исполнительного органа, выход второго фильтра низкой частоты соединен с вторыми входами седьмого, во.сьмого и девятого блОков сравнения, с входом третьего экстрполятора, выход которого соединен через последовательно включенные второй блок-задержки, третий блок сравнения, четвертый блок памяти и второй переключатель с вторым вхдом пятого блока сравнения, выход первого фильтра низкой часто ы подключен к первым входам первого и второго блоков памяти, первого блокс1 сравнения, через первый блок ЗсЩержки - к первому входу шестого блока сравнения, через последовательно включенные второй экстраполятор, третий блок задержки, первый блок сравнения, третий блок памяти и первый переключатель - к входам первого блока определения модуля, сигнум-реле и ,второму входу первого блока умножения, выхбд пятого задатчика подключен через второй блок сравнения к вторым входам третьего и четвертого блоков памяти, к управляющим входам первого и второго переключателей, выход первого блока сравнения соединен с вторым входом первого переключателя и через второй блок опреде;4ения модуля - с вторым второго блока .сравнения,выход третьего блока сравнения подключен к второму входу второго переключателя, выход седьмого блока сравнения подключен через первый блок памяти к второму, входу тринадцатог блока сравнения, выход которого подключен к первому входу ограничи ля, выход восьмого блока сравнения
через второй блок памяти - к первому входу десятого блока сравнения, второй вход которого подключен к выходу блока реализации экспоненциальной зависимости, а выход - к второму входу ограничителя, выход девятого блока сравнения соединен через обратную модель объекта с вторым .входом шестого блока сравнения и через последовательно вклю0 ченные первый квадратор, третий фильтр низкой частоты, одиннадцатый блок сравнения и логический блок И - с управляющим входом ключа, выход первого экстраполято5 ра соединен через последовательно включенные четвертый блок задержки, четвертый блок сравнения, второй квадратор, четвертый фильтр низкой частоты и двенадцатый блок сравнеQ ния с вторым входом логического
блока И, выход шестого блока сравнения соединен с вторым входом четвертого блока сравнения, выходы шестого и седьмого задатчиков сое5 динены с вторыми входами соответств.енно одиннадцатого и двенадцатого блоков сравнения, выход первого сумматора подключен к третьему входу ограничителя, выход интегратора - к дополнительному входу обратной модели объекта, выход генератора пробных сигналов соединен через ключ с вторым входом первого сумматора.
Введение новых блоко,Б и связей
5 позволяет повысить точность системы регулирования, адаптировать коэффициент передач-и канала регулирования без .нанесения пробных сигналов с прогнозированием рабочих траек0 торий управляющих воздействий и соответствующих им выходов, а также с нанесением пробных сигналов на прогнозируемые траектории рабочих управлений, если последние не пре5 терпевают существенных изменений. Кроме того, в системе оперативно корректируются ограничения на минимально и максимально допустимые значения управляющих воздействий,
Q выход за которые нарушают нормальное протекание технологического процесса.
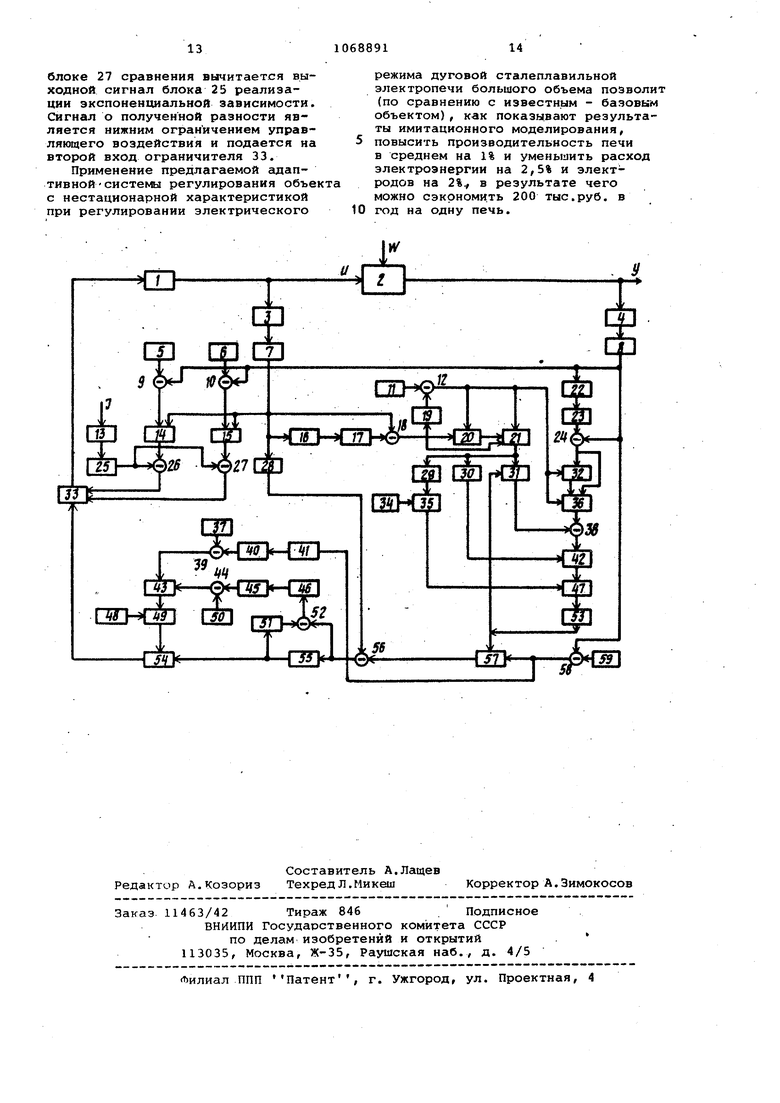
На чертеже приведена блок-схема адаптивной системы регулирования объекта с нестационарной характеристикой, например, дуговой сталеплавильной электропечи,
Адаптивная система регулирования содержит исполнительный орган 1, объект 2 управления, первый дат0 чик 3, второй датчик 4, первый
задатчик 5, второй задатчик 6, перйый фильтр 7 низкой частоты, второй фильтр 8 низкой частоты, седьмой блок 9 сравнения, восьмой блок
5 10 сравнения, пятый задатчик 11, второй блок 12 сравнения, таймер. 1 первый блок 14 памяти, второй блок 15 памяти, второй экстраполйтор 16, третий блок 17 задержки, первый блок 18 сравнения, второй блок 19 определения модуля, третий блок 20. памяти, первый переключатель 21, третий экстраполятор 22, второй блок 23 задержки, третий блок 24 сравнения, блок 25 реализации экспоненциальной зависимости тринадцатый блок 26 сравнения,де-сятый блок 27 сравнения, первый блок 28 задержки, первый блок 29 определения модуля, -аигнум-реле 30 первый блок 31 умножения, четвертый блок 32 памяти, ограничитель 3 четвертый задатчик 34, второй сумматор 35, второй переключатель 36, шестой згщатчик 37, пятый блок 38 сравнения-, одиннадцатый блок 39 сравнения, третий фильтр 40 низкой частоты, первый квадратор 41, второй блок 42 умножения, логический блок И 43, двенадцатый блок 44 сра нения, четвертый Лильтр 45 низкой частоты, второй квадратор 4б, блок 47 деления, генератор 48- пробных сигналов, ключ 49, седьмой задатчик 50, четвертый блок 1 задержки, четвертый блок 52 сравнения, интегратор 53, первый сумматор 54, первый экстраполятор 55, шестой блок 56 сравнения, обратную модель 57 объекта, девятый блок 58 сравне и третий задатчик 59. На чертеже обозначено: U - управляющее воздействие; V - неконтролируемые внешние воздействия; Y -г выходная переменная объекта управления; 3 - сигнал включения таймера. .1. Фильтр низкой частоты выполнен в виде последовательно включенных блока сравнения, ограничителя и ий тегратора, выход которого соединен с первым входом блока сравнения и является выходом фильтра низкой ча тоты, вход которого соединен с вто рым входом блока сравнения. Блок памяти реализован на стандартных логических элементах и имеет два входа: информационный и вход разре шения записи. При поступлении сигнала на второй вход.происходит запись информации. Экстраполяторы вы полнены в виде реальных форсирующи звеньев. Генератор пробных сигналов представлен, в частном случае, мультивибратором, вырабатывающим прямоугольные импульсные сигналы. Переключатель содержит сумматор, замыкающий и размыкающий ключи, ин формационные входы которых соединены с информационными входами переключателя, управляющие входы - с - управляющим входом переключателя, выходы KJшчeй соединены с входами сумматора, подключенного выходом к выходу переключателя. Адаптивная система регулирования объекта с нестационарной характеристикой содержит подсистёквя, выполняю щие функции сщаптации коэффициента передачи канала регулирования, определения момента подключения гене- , ратора пробных сигналов, оперативного уточнения ограничений йа управляющие воздействия и выработки йе- : посредственно управляющего воздейстг- ВИЯ. , Коэффициент передачи канала регулирования адаптируется по данным о приращениях управляющего воздействия и выходной переменной относительно их экстраполированных значений, что позволяет получать хорошие оценки коэффициента в замкнутой системе регулирования во время ее нормального функционирования. Предусмотрено также нанесение пробных сигналов с целью адаптации коэффициента передачи при значительном ухудшении качества- регулироваНИН. . Адаптация коэффициента передачи осуществляется следующим образом. Величина выходной переменной V измеряется вторым датчиком .4 и полученный сигнал подается на вторОй фильтр 8 низкой частоты, где подавляется измерительная помеха. Выходной сигнал второго фильтра 8 низкой- частоты экстраполируется на интервал времени Ту третьим экстраполятором 22. Интервсш времени Т выбирается таким образом, чтобы практически закончился переходный процесс, вызванный измененнем управляющего воздействия, т..е. равным (2-3)T, где t и Т - постоянные времени чистого запаздывания и инерции канала регулирования. Экстраполированный сигнал задерживается во втором блоке 23 задержки на интервги времени f и вычитается в третьем блоке 24 сравнения из выходного сигнала второго фильтра.8 низкой частоты. На выходе третьего блока 24 . сравнения получается сигнал о приращении лУ выходной переменной относительно ее экстрапОлнрованного значения, который подается на первый (информационный) вход четвертого блока 32 памяти и на второй вход второго.переключателя 36. Аналогично выходной переменной величина управляющего воздействия измеряется первым датчиком 3 и полученный сигнал подается на фильтр 7 низкой частоты. Выжодной сигнёш первого фильтра 7 низкой частоты экстраполируется во втором энстраполяторе 16 на интервал времени Т/ , задерживается в третьем блоке 17 задержки на тот же интервал времени и вычитается в первом блоке 18 сравнения из выходного сигнала первого фильтра 7 низкой частоты. На выходе первого блока 18 сравнения получается сигнал о приращении дУ управляющего воздействия относительно его экстраполированного значения, который подается на информационный вход третьего блока 20 памяти и второй вход первого переключателя 21.
Уточнение коэффициента передачи канала регулирования производится только в том случае, когда приращения uU имеют значительную величину, что свидетельствует о существенных изменениях управляющего воздействия. В момент времени,когда сигнал о1ди1 превышает заданное значение, сигналы olAUl и iY через первый 21 и второй 36 переключатели поступают в блоки расчета коэффициента. Если же сигнал о ли не превышает заданного значения, то в блоках 20 и 32 памяти запоминаются сигналы о ли и aV в момент времени, когда сигнал |д.U 1 равняется заданному значению. С этой ;Целью сигнал о заданном значе нии uU с выхода пятого задатчика 11 подается через второй блок 19 определения на первый вход вторрго блока 12 сравнения, где вычитается из выходного сигнала первого блока 18 сравнения. Если -выходной сигнал второго блока 12 сравнения больше., нуля, то первый 21 и второй 36 переключатели соединяют с выходом свои вторые входы и сигналы о л и и &V поступают через эти переключатели для дальнейшей обработк В это время на вторые входы третьего 20 и четвертого 32 блоков памяти поступает сигнал, запрещающий запоминание сигналов.. Когда выходной сигнал второго блока 12 сравнения становится меньше нуля (переходит через нуль), то в этот момент времени разрешается запись сигналов о ли и iY, переключатели 21 и 36 соедняют свои выходы с первыми входами и для дальнейшей обработки поступают сигналы с выходов третьего 20 и четвертого 32 блоков памяти.
Адаптация коэффициента передачи канала регулирования осуществляется по выражению
/ C YttVicftVuU&Vaiqn iU(t
):
dfl-, 1
V uUCtH
Qt4
T
-постоянная, времени интегрирования ;
e-переменная интегрирования;
5 - постоянный коэффициент; С.-1 - сигнум-функция.
.Для реализации выражения (1) выходной сигнал третьего блока 20 памяти о ди(t) подается на входы 5 первого блока 31 умножения, сигнумреле 30 и первого блока 29 определения модуля. В первом блоке 31 умножения перемножается сигнал о uU(i.)c сигналом о t (4) поступающим
0 с. выхода интегратора 53. Сигнал о полученном произведении вычитается в пятом блоке 38 сравнения из сигнала о лЧ (i) , идущего с выхода второго переключателя 36. Сигнал
S о полученной разности умножается во втором блоке 42 умножения на сигнал о S,qt ь.U. (-t) , который вырабатывается на выходе сигнум-реле 30, Выходной сигнал блока 29 определеQ ния модуля суммируется во втором сумматоре 35 с выходным сигналом 5JI четвертого задатчика. 34. В блоке 47 деления выходной сигнал второго, блок а 42 умножения делится
5 на выходной сигнал второго сумматора 35 и полученный сигнал подается на интегратор 53 с постоянной времени интегрирования Ti2. На выходе интегратора 53 получается сигнал о текущем значении коэффициента передачи К, который подается на дополнительный вход обратной модели 57 объекта.
Для выработки управляющего воздействия из выходного сигнала о
5 v второго фильтра 8 низкой частоты в девятом бл.оке 58 сравнения вычитается сигнал Ч о заданном значении выходной переменной и сигнал о полученной .разности подается на вход обратной модели 57 объекта без запаздывания. На выходе обратной модели 57 объекта получается сигнал .sy (t-t) .о корректировке управляющего воздействия, который вычитается в шестом блоке 56 сравнения из выходного сигнала первого блока 28 задержки и (t-tr) о фактически реализованном в момент времени (t-t) управляющем воздействии. В результате получается сигнал о запаздывающей оценке идег.льного управляющего воздействия, т.е.
,к{
ua-t ua-tVFt oC4((t)i,
о
U
где и (t-t) - оценка идеального
управляющего воздействия;
toD 1 - математический оператор обратной модели объекта без запаздывания
Сигнал о U подается на вход первого экстраполятора 55, в коtopoM экстраполируется на интервал
времени с, затем суммируется в первом сумматоре 54 с выходным сигналом генератора 48 пробных сигналов, если ключ 49 замкнут/ и через огра ничитель 33 с оперативно уточняеьшм границами поступает на исполнительный орган 1 для реализации.
Генератор 48 пробных сигналов вырабатывает воздействия импульсного типа длительностью t+(3-4)Т в тех ситуациях, когда ошибки экстраполяции управляняцего воздействия незначительны, а ошибка регулирования выходкой переменной достигает большой величины. Такие ситуации возникают тогда, когда оценка коэффициента передачи объекта не соответствует действительному значению этого коэффициента; и поэтому в этих случаях неоЪходимо более тщательное уточнение коэффициента передачи, для чего и наносятся дополнительные пробные сигналы.
Для подключения генератора 48 пробных сигналов с выхода девятого блока 58 сравнения сигнал об ошиб-ке регулирования подается через первый квадратор 41 на третий фильтр 40 низкой частоты, выходной сигнап которого соотвеЛтвует оценке текущей дисперсии ошибки регулирования. Из этого сигнала в одиннадцатом блоке 39 сравнения вычитается выходной сигнал шестого задатчика 37 о допустимом значении оценки дисперсии ошибки регулирования. Сигнал о полученной разности подается на первый вход логического блока И 43. С целью определения ошибки экстраполяции управляющего аоздействия выходирй сигнал первого экстраполятора 55 задерживается в четвертом блоке 51 задержки на интервал экстраполяции и вычитается в четвертом блоке 52 сравнения иэ входного сигнала первого экстраполятора 55. Сигнгш об сшибке экстраполяции проходит через второй квадратор 46, четвертый фильтр 45 низкой частоты, вычитаетс в двенадцатом блоке 44 сравнения из выходного сигнала седьмого задатчика 50 о допустимом знач1ении оценки дисперсии ошибки экстраполяции и подается на второй вход логического блока И 43. Если входны сигналы логического блока И .43 положительные, т.е. ошибки экстраполяции управляющего воздействия
незначительны, а ошибки регулирования выходной переменной большие,
.то ключ 49 замыкается и генератор 4 пробных сигналов подает воздействия
иа вход первого сумматора 54; В противном случае сигналы с генератора 48 пробных сигналов не поступают .на вход первого сумматора 54.
Ограничения на нижнее и верхнее Л значения управляющего воздействия назначаются из анализа выходной переменной объекта уп{)авления1 Так, например, при регулировании электрического режима дуговой электропечи ограничения на перемещения электг родов обусловливаются величиной тока: если электроды Опускаются очень низко, то происходит короткое
0 замыкание и величина тока су)цественно возрастает, если же электроды поднимаются высоко, то происходит разрыв дуги и величина тока становится равной нулю. В то же время по ме5ре расплавления: уровень металлической шихты опускается и поэтому следует по ходу плавки уменьшать и верхнее и нижнее ограничения на управляющее воздействие.
Выходной сигнал Y второго фильт0ра 8 низкой частоты при определении верхнего ограничения подается на . второй вход седьмого блока 9 срав-. нения, где вычитается из выходного сигнала первого задатчика 5 и полу5ченный сигнал идет на управляющий второй вход первого блока. 14 памяти. Если выходной сигнал седьмогоблока 9 сравнения становится больше нуля т.е. имеет место разрыв дуги/ то .:
0 сигнал об управляющем воздействии с выхода первого фильтра 7 низкой частоты в момент разрыва дуги запоминается в первом блоке 14 памяти. С выхода первбго блока 14 памяти
5 сигнал идёт на второй вход тринадцатого блока 26 сравнения. На первый вход этого блока сравнения . поступает сигнал с выхода блока 25 реализации экспоненш1альной зави0симости, выходной сигнал которого экспоненциёшьно спадает во времени, начиная с некоторого момента, определяемого сигналом СЗ , включающим таймер 13. В частности, это момент времени начала очеред5ной плавки стали. В тринадцатом блоке 26 сравнения выходной сигнал блока 25 реализации экспоненциальной зависимости вычитается из выходного сигнала первого блока 14
0 памяти, в результате получается . сигнал 6 верхнем ограничении управляющего воздействия. Этот сигнёш идет на первый вход ограничителя 33. 5
Аналогично определяется величина нижнего ограничения. Однако при этом в BOCbhfOM блоке 10 сравнения из сигнёша о Y вычитается выходной сигнал второго задатчи0ка 6. Если сигнал становится положительным/ то в этот момент времени имеет место короткое замыкание и сигнал о Y запоминается во втором блоке 15 памяти. Из выходного сигнала второго блока памяти в десятом
5
блоке 27 сравнения вычитается выходной сигнал блока 25 реализации экспоненциальной зависимости. Сигнгш о полученной разности является нижним ограничением управляющего воздействия и подается на второй вход ограничителя 33.
Применение предлагаемой адаптивной системы регулирования объе с нестационарной характеристикой при регулировании электрического
режима дуговой сталеплавильной электропечи большого объема позволи (по сравнению с известным - базовым объектом), как показывают результаты имитационного моделирования, повысить производительность печи в среднем на 1% и уменьшить расход электроэнергии на 2,5% и электродов на 2%., в результате чего можно СЭКОНОМИТЬ 200 тыс.руб. в год на одну печь.
