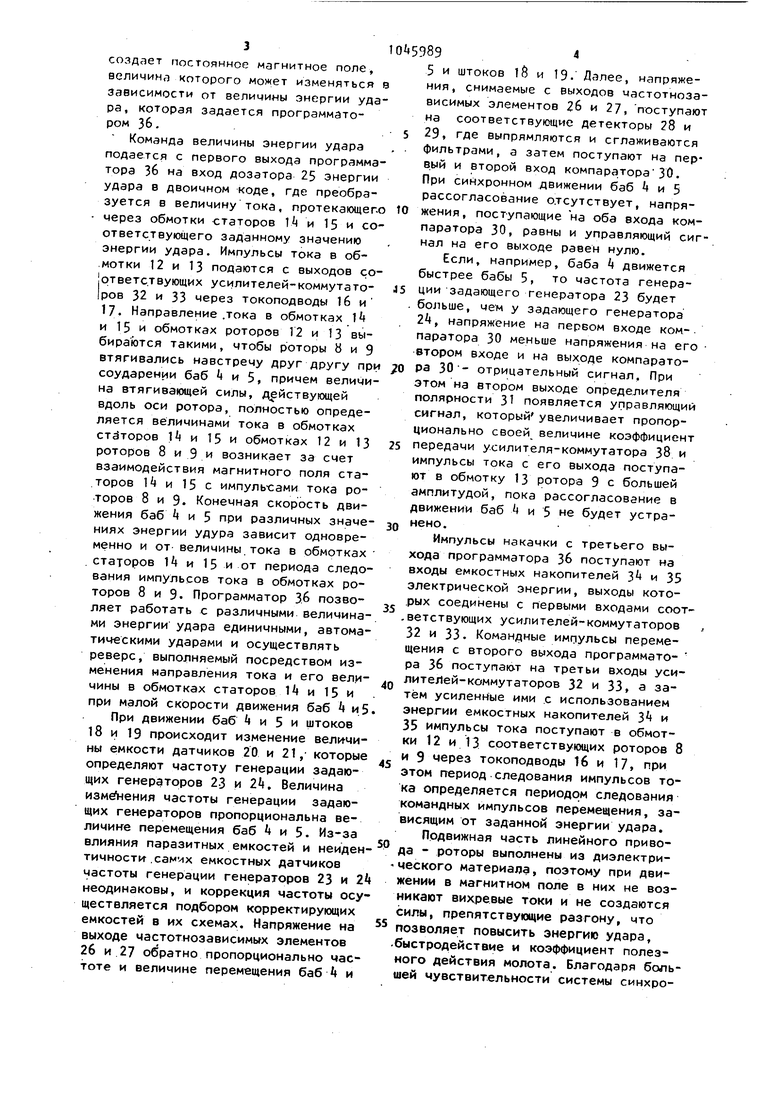
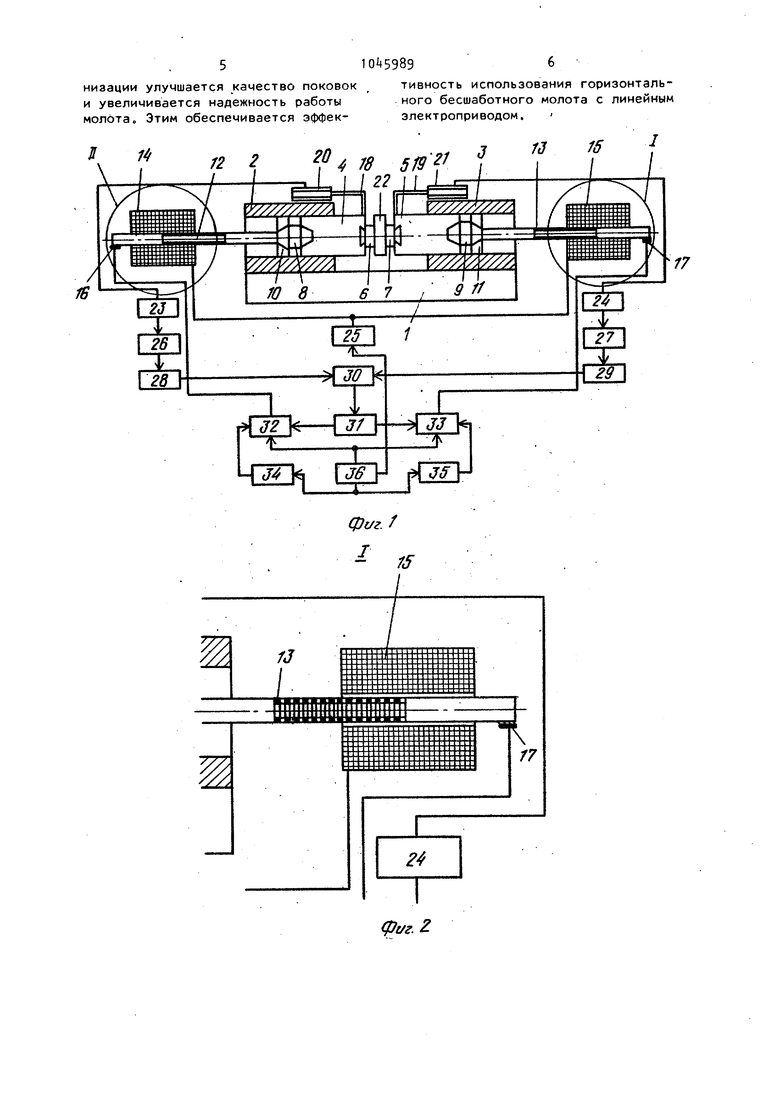
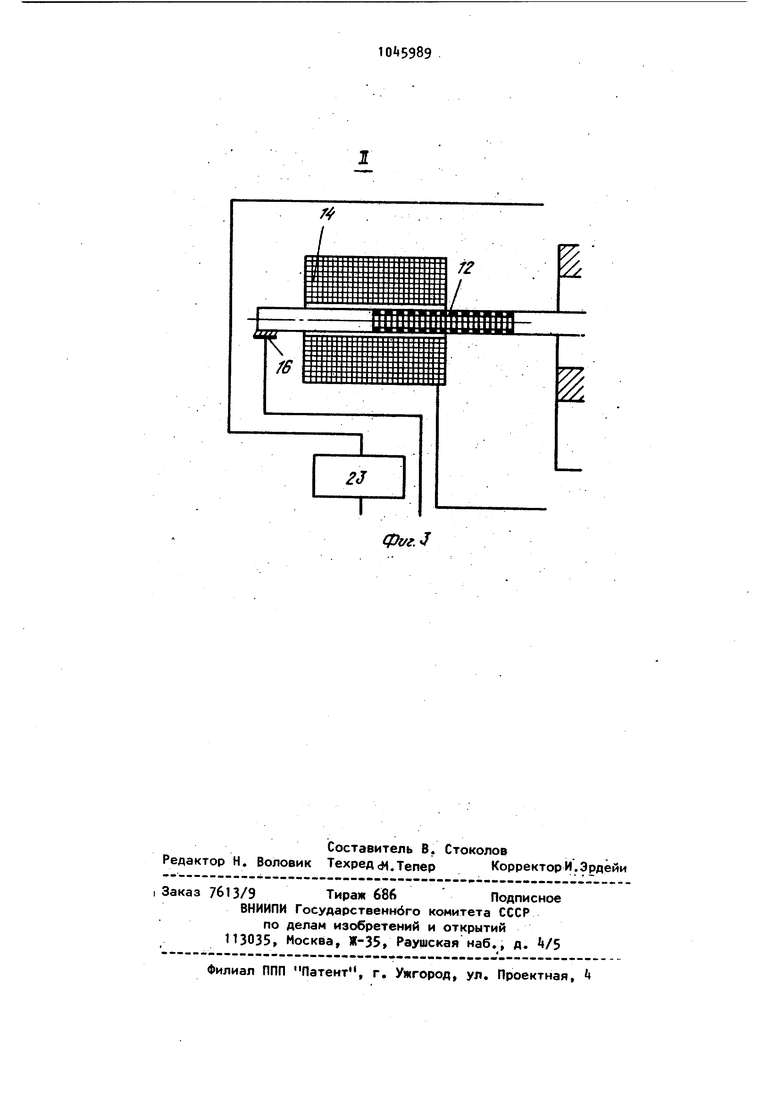
1 Изобретение относится к машиностроению, в частности к конструкции оборудования для обработки давлением Известен горизонтальный бесшаботный молот с электромагнитным -приводом, содержащий неподвижно закрепле ные на станине два статора и размещенные внутри последних подвижные линейные роторы, а также жестко свя занные С-подвижными роторами ба.бы с инструментом,- установленные в напра ляющих станины, датчика хода каждой бабы и систему управления J. . Недостатком данного молота является его низкий КПД из-за потерь от вихревых токов в роторах линейного привода, а также невысокая точность синхронизации хода каждой бабы, моло та, что снижает надежность его работы. Цель изобретения - повышение надежности и КП1Д устройства. Поставленная цель достигается тем что в горизонтальном бесшаботном мо лоте с электромагнитным приводом, содержащем неподвижно закрепленные на станине два статора и размещенные внутри последних подвижные линейные роторы, а также жестко связанные с подвижными роторами бабы с инструмеЯ том, установленные в направляющих станины, датчики хода каждой бабы и систему управления, последняя снабжена программатором, дозатором энергии удара, компаратором, определителем полярности, двумя емкостными накопителями, двумя усилителями-коммутаторами, а также двумя каналами синхронизации ударов, каждый из которых состоит из соединенных последовательно датчика положения бабы, выполненного емкостным, задающего, генератора, частотнозависимого элемента и детектора, причем линейные роторы выполнены цилиндрическими из диэлектрического материала с обмотками, соединенными через токопроводы с выходами соответствующих усилителей-коммутаторов, при этом выходы детекторов каналов синхронизации соединены с рходами компаратора, выход которого связан с определителем полярности и через него с входами усилителей-коммутаторов, другие входы которых соединены с выходами емкостных накопителей и программатора, другой выход которого связан с дозатором энергии удара. 92 На фиг. 1 изображена конструктивная схема молота; на фиг. 2 - узел 1. на фиг.1; на фиг, 3. узел 11 на фиг.1. Молот содержит размещенные на станине 1 направляющие 2 и 3, в которых смонтированы бабы и 5 с-узлами крепления инструмента 6 и 7. К торцам баб k и S с противоположной стороны от крепления инструмента жестко закреплены линейные роторы 8 и 9, выполненные цилиндрическими из диэлектрического, материала. Линейные роторы 8 и 9 крепятся к бабам А и 5 с помощью планок 10 и 11. На роторах 8 и 9 размещены обмотки возбуждения 12 и 13. На станине 1 также закреплены неподвижно статоры и 15. Токопроводы 1б и 17 соединены с обмотками 12 и 13 соответствующих роторов 8 и 9. Штоки 18 и 19, жестко закрепленные на соответствующих бабах и 5, расположены внутри соответствующих емкостных датчиков 20 и 21. Заготовка-22 помещается на оси штамповки. Датчики 20 и 21 определяют частоту генерации задающих генераторов 23 и 2. Обмотки статора 1 и 15 соединены соответствующим образом с выходом дозатора 25 энергии удара. Выходы, задающих генераторов 23 и 2 соединены с входами соответствующих частотнозависимых элементов 26 и 27, сигналы с выхода которых поступают на входы соответствующих детекторов 28 и 29, затем соответственно на первый и второй входы компаратора 30. Выход компаратора 30 .соединен с входом определителя полярности 31 ..Вьлходы уси- лителей-коммутаторов 32 и 33 соединены через соответствующие, токоподводы 16 и 17 с обмотками 12 и 13 роторов 8 и 9- Входы емкостных накопителей З и 35 соединены с третьим выходом программатора Зб, первый выход которого подключен к входу дозатора 25 энергии удара, а второй - к третьим входам усилителей-коммутаторов 32 и 33, на вторые входы которых поступают соответственно сигналы с первого и второго выходов определителя полярности 31. Выходы емкостных накопителей 3 и 35 подключены соответственно к первым входам усилителей-коммутаг торов 32 и 33. Молот работает следующим образом. В статическом режиме ток, который подается в обмотки статоров 14 и 15 с выхода дозатора 25 энергии удара создает постоянное магнитное поле, величина которого может изменяться в Зависимости от величины энергии удара, которая задается программатором 36.. Команда величины энергии удара подается с первого выхода программатора Зб на вход дозатора 25 энергии удара в двоичном коде, где преобразуется в величину тока, протекающего через обмотки статоров 1 и 15 и соответствующего заданному значению энергии удара. Импульсы тока в об.мотки 12 и 13 подаются с выходов соответствующих усилителей-коммутаторов 32 и 33 через токоподводы 1б и 17. Направление .тока в обмотках If и 15 и обмотках роторов 12 и 13 выбираются такими, чтобы роторы 8 и 9 втягивались навстречу друг другу при соударении баб и 5, причем величина втягивающей силы, действующей вдоль оси ротора, полностью определяется величинами тока в обмотках стёторов 1 и 15 и обмотках 12 и 13 роторов 8 и Эй возникает за счет взаимодействия магнитного поля статоров И и 15 с импуль-сами тока роторов 8 и 9. Конечная скорость движения баб и 5 при различных значениях энергии удура зависит одновременно и от- величины.тока в обмотках статоров It и 15 и от периода следования импульсов тока в обмотках роторов 8 и 9. Программатор Зб позволяет работать с различными величинами энергии удара единичными, автоматическими ударами и осуществлять реверс, выполняемый посредством изменения направления тока и его величины в обмотках статоров 14 и 15 и при малой скорости движения баб 4 и5 При движении баб i и 5 и штоков 18 и 19 происходит изменение вели чины емкости датчиков 20 и 21, которые определяют частоту генерации задающих генераторов 23 и 2. Величина измёУ1ения частоты генерации задающих генераторов пропорциональна величине перемещения баб и 5. Из-за влияния паразитных емкостей и неиден тичности .саммх емкостных датчиков частоты генерации генераторов 23 и 2 неодинаковы, и коррекция частоты осу ществляется подбором корректирующих емкостей в их схемах. Напряжение на выходе частотнозависимых элементов 2б и 27 обратно пропорционально частоте и величине перемещения баб 4 и 5 и штоков l6 и 19. Далее, напряжения, снимаемые с выходов частотнозависимых элементов 2б и 27, поступают на соответствующие детекторы 28 и 29, где выпрямляются и сглаживаются фильтрами, а затем поступают на первый и второй вход компаратора30. При синхронном движении баб 4 и 5 рассогласование отсутствует, напряжения, поступающие на оба входа компаратора 30, равны и управляющий сигнал на его выходе равен нулю. Если, например, баба 4 движется быстрее бабы 5, то частота генерации задающего генератора 23 будет больше, чем у задающего генератора 2, напряжение на первом входе ком-, паратора 30 меньше напряжения на его втором входе и на выходе компаратора 30- отрицательный сигнал. При этом на втором выходе определителя полярности 3 появляется управляющий сигнал, который увеличивает пропорционально своей величине коэффициент передачи усилителя-коммутатора 38 и импульсы тока с его выхода поступают в обмотку 13 ротора 9 с большей амплитудой, пока рассогласование в движении баб f и 5 не будет устранено. Импульсы накачки с третьего выхода программатора Зб поступают на входы емкостных накопителей З и 35 электрической энергии, выходы которых соединены с первыми входами соответствующих усилителей-коммутаторов 32 и 33. Командные импульсы перемещения с второго выхода программатора 36 поступают на третьи входы усилитеЛей-коммутаторов 32 и 33, а затем усиленные ими ,с использованием энергии емкостных накопителей 34 и 35 импульсы тока поступают в обмотки 12 и 13 соответствунмцих роторов 8 и 9 через токоподводы 16 и 17, при этом период следования импульсов тока определяется периодом следования командных импульсов перемещения, зависящим от заданной энергии удара. Подвижная часть линейного привода - роторы выполнены из диэлектрического материала, поэтому при движении в магнитном поле в них не возникают вихревые токи и не создаются силы, препятствующие разгону, что позволяет повысить энергию удара, быстродействие и коэффициент полезного действия молота. Благодаря большей чувствительности системы синхронизации улучшается качество поковок и увеличивается надежность работы молота. Этим обеспечивается эффективность использования горизонтального бесшаботного молота с линейным электроприводом.
фаг. /
fs
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесшаботный горизонтальный молот | 1982 |
|
SU1045988A1 |
| Система синхронизации бесшаботного молота с соосно смонтированными на станине рабочими цилиндрами с установленными в них поршнями и штоками с узлами крепления инструмента | 1981 |
|
SU988436A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ МОЛОТ И СПОСОБ УПРАВЛЕНИЯ ЕГО РАБОТОЙ | 1993 |
|
RU2063292C1 |
| Электромагнитный молот | 1974 |
|
SU544495A1 |
| Устройство дистанционного управления паровоздушным молотом | 1983 |
|
SU1072970A1 |
| АСИНХРОННЫЙ ДВИГАТЕЛЬ | 1992 |
|
RU2088042C1 |
| Устройство управления паровоздушным молотом | 1983 |
|
SU1131584A1 |
| Электрический молот | 1977 |
|
SU650705A1 |
| БЕСШАБОТНЫЙ МОЛОТ | 1980 |
|
SU951808A1 |
| УСТРОЙСТВО ВОЗБУЖДЕНИЯ ГЕНЕРАТОРА И КОНТРОЛЯ КАЧЕСТВА ГЕНЕРИРУЕМОЙ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ ВЕНТИЛЬНО-РЕАКТИВНЫМ ГЕНЕРАТОРОМ | 2018 |
|
RU2690673C1 |

iiiiiiaiiiiiiiiiiiiiiiiiiiii IIIIIIIIII1IIIIIIIIIIIIIIIII
/7
ф1/г.
flltllllKtIBMll
iBIBIIIIIIIIIflllRIIII
фуг,
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
