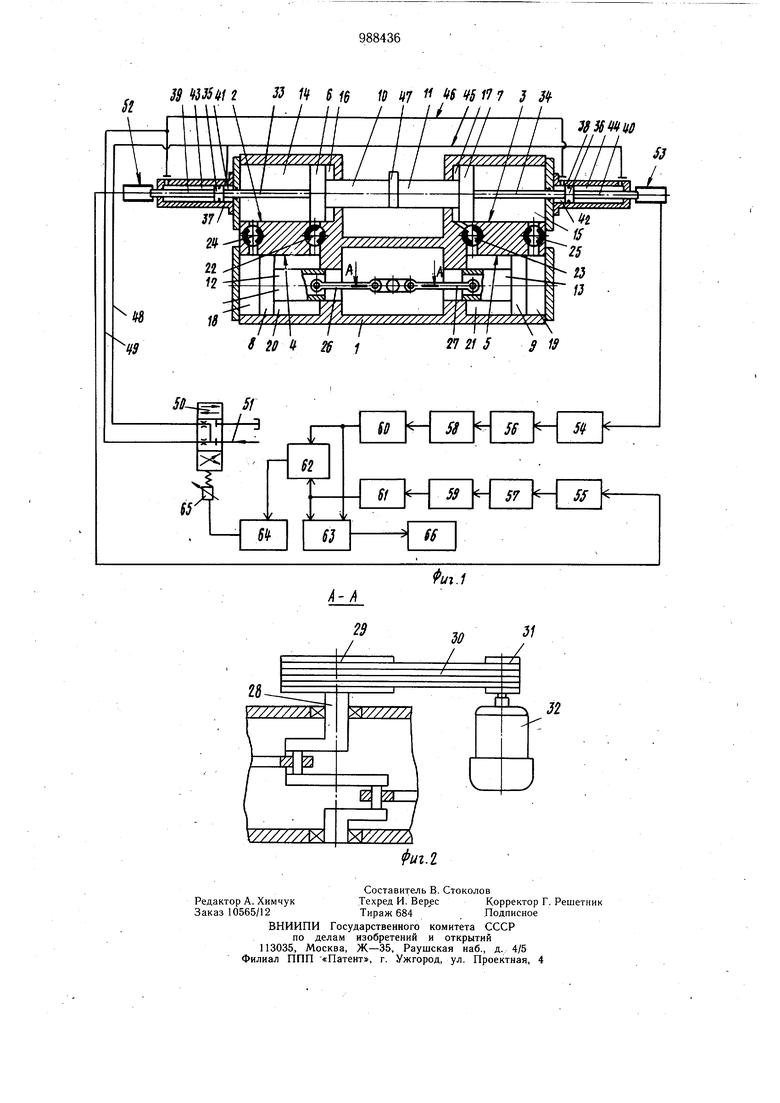
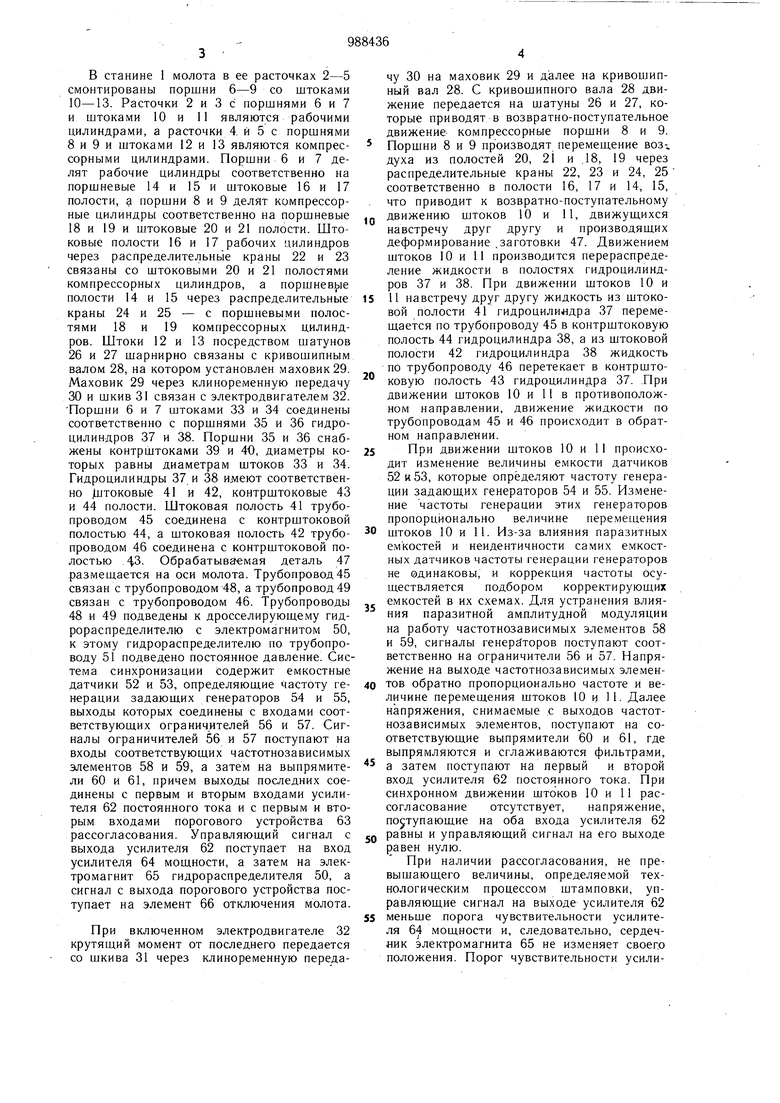
В станине 1 молота в ее расточках 2-5 смонтированы поршни со штоками 10-13. Расточки 2 и 3 с поршнями 6 и 7 и штоками 10 и 11 являются рабочими цилиндрами, а расточки 4. и 5 с поршнями 8 и 9 и штоками 12 и 13 являются компрессорными цилиндрами. Поршни 6 и 7 делят рабочие цилиндры соответственно на поршневые 14 и 15 и штоковые 16 и 17 полости, а поршни 8 и 9 делят компрессорные цилиндры соответственно на поршневые 18 и 19 и штоковые 20 и 21 полости. Штоковые полости 16 и 17 рабочих цилиндров через распределительные краны 22 и 23 связаны со штоковыми 20 и 21 полостями компрессорных цилиндров, а поршневые полости 14 и 15 через распределительные краны 24 и 25 - с поршневыми полостями 18 и 19 компрессорных цилиндров. Штоки 12 и 13 посредством шатунов 26 и 27 шарнирно связаны с кривошипным валом 28, на котором установлен маховик 29. Маховик 29 через клиноременную передачу 30 и шкив 31 связан с электродвигателем 32. Поршни 6 и 7 штоками 33 и 34 соединены соответственно с поршнями 35 и 36 гидроцилиндров 37 и 38. Поршни 35 и 36 снабжены контрштоками 39 и 40, диаметры которых равны диаметрам штоков 33 и 34. Гидроцилиндры 37 и 38 и.меют соответственно Д1токовые 41 и 42, контрштоковые 43 и 44 полости. Штоковая полость 41 трубопроводом 45 соединена с контрштоковой полостью 44, а штоковая полость 42 трубопроводом 46 соединена с контрштоковой полостью 43. Обрабатываемая деталь 47 размешается на оси молота. Трубопровод 45 связан с трубопроводом 48, а трубопровод 49 связан с трубопроводом 46. Трубопроводы 48 и 49 подведены к дросселируюшему гидрораспределителю с электромагнитом 50, к этому гидрораспределителю по трубопроводу 51 подведено постоянное давление. Система синхронизации содержит емкостные датчики 52 и 53, определяющие Частоту генерации задающих генераторов 54 и 55, выходы которых соединены с входами соответствующих ограничителей 56 и 57. Сигналы ограничителей 56 и 57 поступают на входы соответствующих частотнозависимых элементов 58 и 59, а затем на выпрямители 60 и 61, причем выходы последних соединены с первым и вторым входами усилителя 62 постоянного тока и с первым и вторым входами порогового устройства 63 рассогласования. Управляющий сигнал с выхода усилителя 62 поступает на вход усилителя 64 мощности, а затем на электромагнит 65 гидрораспределителя 50, а сигнал с выхода порогового устройства поступает на элемент 66 отключения молота.
При включенном электродвигателе 32 крутящий момент от последнего передается со шкива 31 через клиноременную передачу 30 на маховик 29 и д;алее на кривошипный вал 28. С кривошипного вала 28 движение передается на шатуны 26 и 27, которые приводят в возвратно-поступательное движение компрессорные поршни 8 и 9.
Поршни 8 и 9 производят перемещение воз-., духа из полостей 20, 21 и .18, 19 через распределительные краны 22, 23 и 24, 25 соответственно в полости 16, 17 и 14, 15, что приводит к возвратно-поступательно.му
д движению штоков 10 и 11, движущихся навстречу друг другу и производящих деформирование ,заготовки 47. Движением штоков 10 и 11 производится перераспределение жидкости в полостях гидроцилиндров 37 и 38. При движении щтоков 10 и
11 навстречу друг другу жидкость из штоковой полости 41 гидроцилилдра 37 перемещается по трубопроводу 45 в контрштоковую полость 44 гидроцилиндра 38, а из штоковой полости 42 гидроцилиндра 38 жидкость по трубопроводу 46 перетекает в контрштоковую полость 43 гидроцилиндра 37. При движении штоков 10 и И в противоположном направлении, движение жидкости по трубопроводам 45 и 46 происходит в обратном направлении.
5 При движении штоков 10 и 11 происходит изменение величины емкости датчиков 52 и 53, которые определяют частоту генерации задающих генераторов 54 и 55. Изменение частоты генерации этих генераторов пропорционально величине пере.мешения
0 штоков 10 и 11. Из-за влияния паразитных емкостей и неидентичности самих емкостных датчиков частоты генерации генераторов не одинаковы, и коррекция частоты осуществляется подбором корректирующих емкостей в их схемах. Для устранения влияния паразитной амплитудной модуляции на работу частотнозависимых элементов 58 и 59, сигналы генераторов поступают соответственно на ограничители 56 и 57. Напряжение на выходе частотнозависимых элемен0 тов обратно пропорционально частоте и величине перемещения штоков 10 и И. Далее напряжения, снимаемые с выходов частотнозависимых элементов, поступают на соответствующие выпрямители 60 и 61, где выпрямляются и сглаживаются фильтрами, а затем поступают на первый и второй вход усилителя 62 постоянного тока. При синхронном движении штоков 10 и 11 рассогласование отсутствует, напряжение, поступающие на оба входа усилителя 62
Q равны и управляющий сигнал на его выходе равен нулю.
При наличии рассогласования, не превыщающего величины, определяемой технологическим процессом штамповки, управляющие сигнал на выходе усилителя 62
5 меньше порога чувствительности усилителя 64 мощности и, следовательно, сердечник электромагнита 65 не изменяет своего положения. Порог чувствительности усилителя 64 мощности изменяется в зависимости от технологического процесса штамповки. Если рассогласование больше минимального, что недопустимо по технологии штамповки, управляющий сигнал усилителя 62 превышает порог чувствительности усилителя 64, усиливается им и сердечник электромагнита 65 изменит свое положение. Если, например, щток 10 движется быстрее щтока 11, то положение сердечника электромагнита 65 изменяется таким образом, что в трубопровод 45 подается дополнительная порция жидкости через дросселирующий гидрораспределитель 50 из трубопровода , 51, при этом трубопровод 46 через тpyбdпpoвoд 49 соединяется со сливом. Величина открытия каналов дросселирующего гидрораспределителя 50 на подачу жидкости и слив определяется величиной рассогласования в движении штока 10 и 11, т.е. величиной сигнала, поступающего на электромагнит 65. При этом подача и слив жидкости через дросселирующий гидрораспределитель с электромагнитом 50 продолжается до тех пор, пока штоки 10 и 11 не начинают двигаться синхронно. При величине рассогласования движения штоков 10 и 1Г больше критической, что может привести к аварийной ситуации работы молота, сигнал с порогового устройства рассогласования 63 поступает на элемент отключения молота 66, отключая его. Таким образом, путем выбора соответствующей схемь и параметров цепей коррекции в системе синхронизации бесшаботного молота, а также введением порогового устройства рассогласования обеспечивается большая точность определения положения поршней со штоками, несущими инструмент, достигается синхронность их движения и повышается надежность работы молота в процессе эксплуатации в целом. Этим обуславливается экономическая эффективность использования бесшаботного молота с системой синхронизации по сравнению с известным. Формула изобретения Система синхронизации бесшаботного молота с соосно смонтированными на станине рабочими цилиндрами с установленными в них поршнями и штоками с узлами креп/1ения инструмента, содержащая связанные с поршнями емкостные датчики, последовательно соединенные усилители постоянного тока и мощности, электромагнит гидрораспределителя, элемент отключения молота, а также два выпрямителя, выходы которых соединены с первым и вторым входами усилителя постоянного тока, отличающаяся тем, что, с целью повышения точности и надежности, она снабжена ДВУМЯ задающими генераторами, двумя частотнозависимыми элементами и двумя ограничителями, а также пороговым устройством, при этом емкостные датчики соединены задающими генераторами, выходы которых соединены с входами ограничителей, выходы которых подключены к входам частотнозависимых элементов, связанных с выпрямителями, причем выходы последних соединены с двумя входами порогового устройства, выход последнего соединен с элементом отключения молота, а выход усилителя постоянного тока связан через усилитель мощности с электромагнитом гидрораспределителя. Источники информации, принятые во внимание при экспертизе 1. Патент ФРГ № 1552839, В 21 T- 7/46, 29.04.66 (прототип). / 5 /5 // 7 3S ti35iti г / / / / / / / J / / 3856VHtD
| название | год | авторы | номер документа |
|---|---|---|---|
| Горизонтальный бесшаботный молот с электромагнитным приводом | 1982 |
|
SU1045989A1 |
| Бесшаботный молот | 1983 |
|
SU1076174A1 |
| Система управления штамповочным молотом | 1982 |
|
SU1034823A1 |
| Бесшаботный горизонтальный молот | 1982 |
|
SU1045988A1 |
| Бесшаботный молот | 1981 |
|
SU1026916A1 |
| Машина цикличного действия для путевых работ | 1985 |
|
SU1250604A1 |
| Активная подвеска транспортного средства | 1986 |
|
SU1361030A1 |
| ГОРИЗОНТАЛЬНЫЙ БЕСШАБОТНЫЙ МОЛОТ | 2000 |
|
RU2200072C2 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1991 |
|
SU1775527A1 |
| Устройство управления штамповочным молотом (его варианты) | 1979 |
|
SU1120920A3 |