Изобретение относится к машиностроению, в частности к конструкции систем управления оборудованием для обработки давлением.
Извгстно устройство управления паровоздушным молотом, содержащее распределительньй золотник с приводом, узел управленияприводом этого золотника, а также переключатель режимов работы, датчики положения бабы молота и узел ручного управления, при этом распределительный золотник соединен св,оими полостями с рабочим цилиндром молота, атмосферой и источником энергоносителя, а через рычаги с приводом распределительного золотника, вход которого подключен к узлу управления этого привода, приче датчики положения бабы молота и переключатель режимов работы подсоединены с узлом ручного управления Л .
Недостатком устройства является отсутствие обратной связи позиционирования распределительного золотника, а также коррекции энергии по скорости бабы, что снижает точность дозирования энергии удара, а следовательно, и качество поковок. Кроме этого, в известном устройстве отсутствует возможность программирования режимов работы молота, что снижает возможности использования системь управления.
Цель изобретения - улучшение качества поковок путем повышения точности дозирования энергии удара.
Поставленная цель достигается тем что устройство управления паровоздушным молотом, содержащее распределительньй золотник с приводом, узел управления приводом этого золотника переключатель режимов работы, датчик положения бабы молота и узел ручного управления, при этом распределительньШ золотник соединен своими поЛостя ми с рабочим, цилиндром молота, атмосферой и источником энергоносителя, а через рычаги - с приводом распределительного золотника вход которого подключен к узлу ynpaKneuwi этого привода, причем датчики положения бабы молота и переключатель режимов работы соединены с узлом ручного управления, снабжено датчиком обратной связи, усилителем., сумматором счетчиком с блоком Т1равления счетчика, задатчиком, элементами НЕ и задержки, генераторами тактовых импульсов
и стабильной частоты, а также блокам автоматического управления, коррекци энергии удара, сравнения, оперативной памяти и эталонных напряжений, при этом привод распределительного золотника выполнен в виде гидроцилиндра, а узел управления приводом распределительного золотника в виде электрогидроусилителя, соединенного своим входом с усилителем, вход которого соединен с ВЬЕХОДОМ сумматора, входы которого связаны с выходами переключателя режимов работы и датчиком обратной связи, установленном на штоке гидроцилиндра, входы блока автоматического управления соединены с выходами элемента НЕ, блоков сравнения оперативной памяти и эталонных напряжений, а также генератора тактовых импульсов, а входы блока автоматического управления связаны с переключателем режимов работы и входом блока коррекции энергии ударов,другие входы которого связаны с выходами блока оперативной памяти, генератора стабильной частоты и двумя датчиками положения бабы молота, выход блока коррекции энергии удара подклю чен к переключателю режимов работы, причем входы блока управления счетчиком связаны с выходами блока оперативной памяти, элементов НЕ и задержки, вход которого соединен с выходом генератора стабильной частоты, а выход - со счетчиком, соединенным своими выходами с входом блока сравнения, к другим входам которого подключены выходы блока оперативной памяти, входы которого связаны с задатчиком и генератором тактовых сигналов.
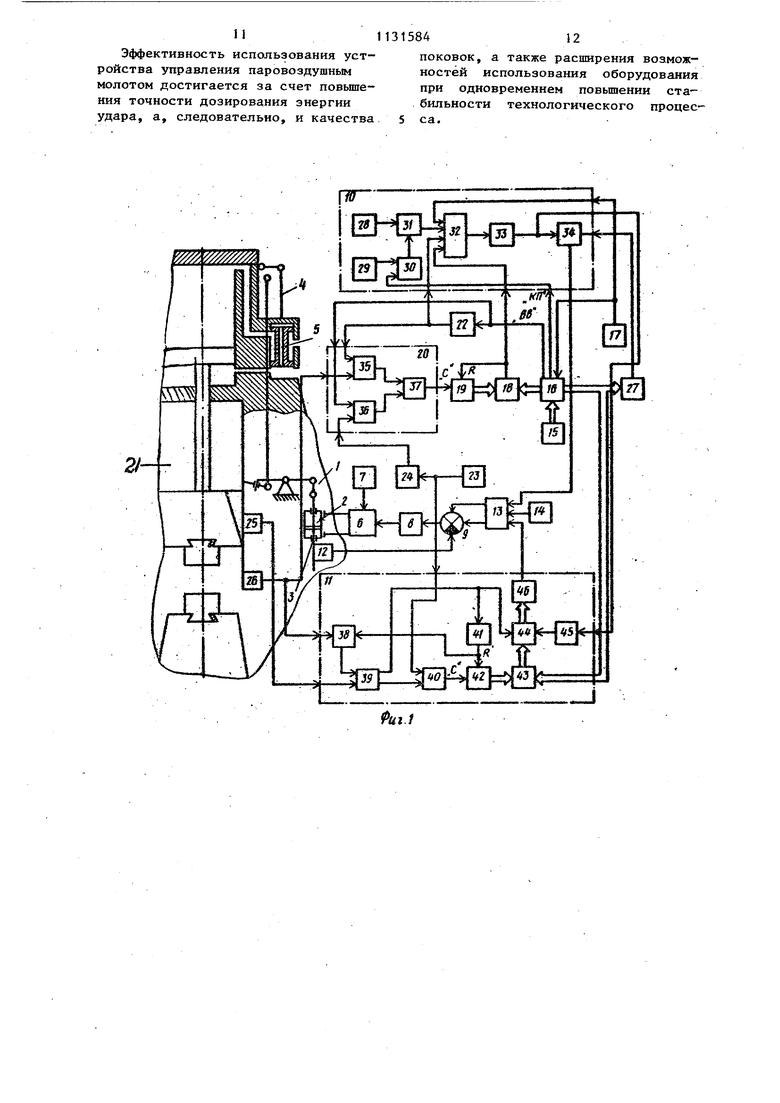
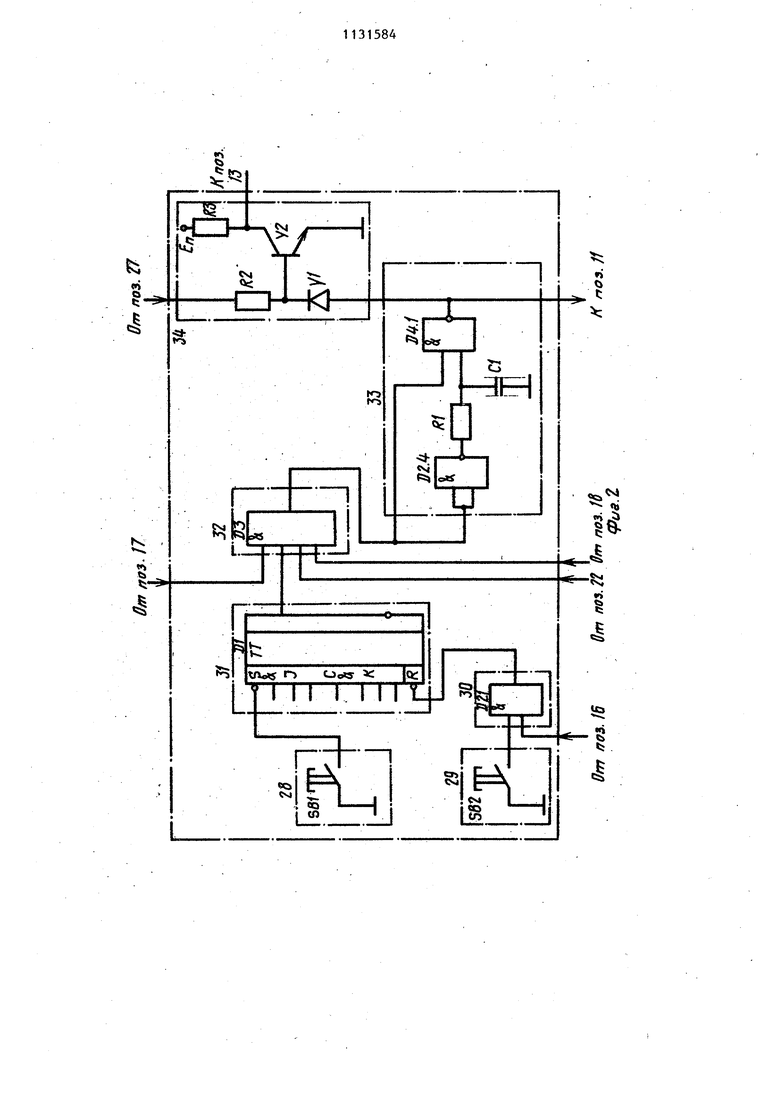
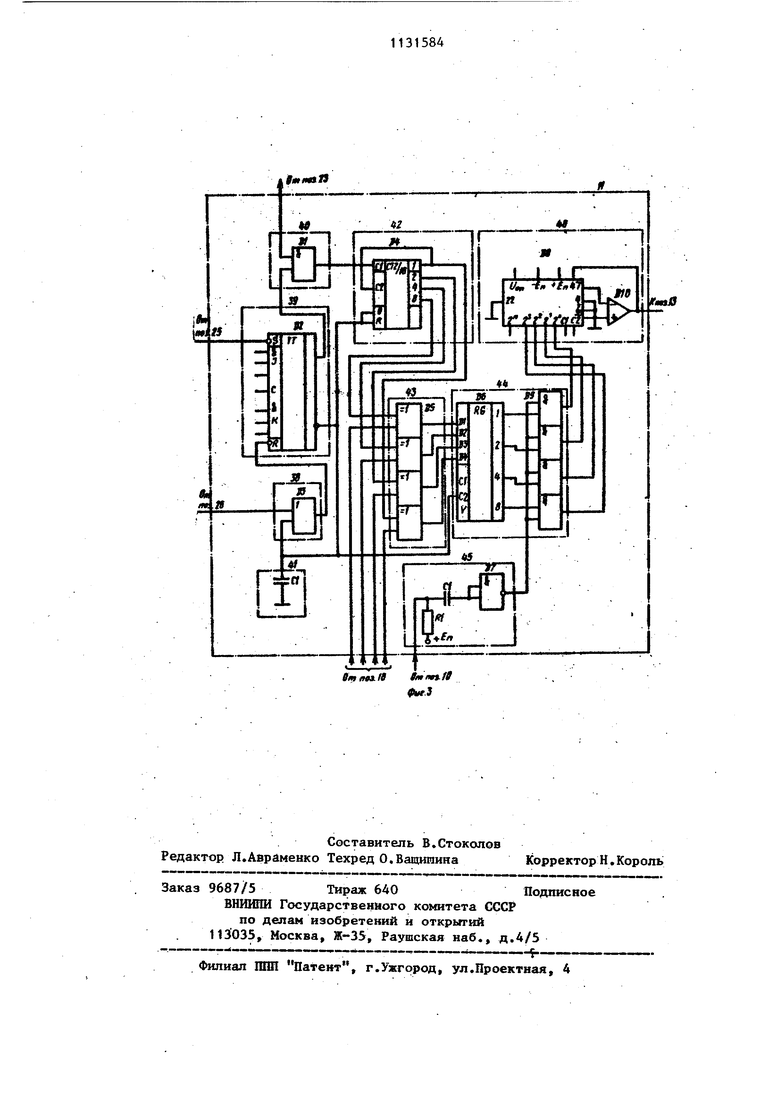
На фиг.1 приведена блок-схема устройства; на фиг.2 - функциональная схема блока автоматического управления; на фиг.З - функциональная схема блока коррекции энергии удара.
На станине 1 молота расположен гидроцилиндр 2, шток 3 которого через систему рычагов 4 связан с распределительным золо,тником 5,верхняя и нижняя полость которого связаны с атмосферой, а средняя полость связана с источником энергоносителя. Полости гидроцилинДра 2 соединены с выходом электрогидроусилителя 6, питание которого осуществляется от гидростанции 7. Управляющий электрический сигнал на вход электрогидроусили31
теля 6 подается с выхода -усилителя 8, на вход которого подается резуль тирующий сигнал с выхода суммирующего устройства 9. Суммирующее устройство 9 вырабатывает результирующий . сигнал, определяемый как сумма сигнала с блока 10 автоматического управления и сигнала с блока 11 коррекции энергии удара молота с вычитанием сигнала с датчика 12 обратной свя- аи. Переключатель 13 режимов работы предназначен для коммутации выходов блока 10 автоматического управления и блока 11 коррекции энергии удара молота с положительными входами суммирующего устройства 9 в автоматическом режиме работы молота или выхода узла 14 ручного управления - в ручном режиме, в котором вькод блока 11 коррекции энергии удара отключается от суммирующего устройства 9. Сигнал с датчика 12 обратной связи поступает на отрицательный вход суммирующего устройства 9 во всех режимах работы молота, Задатчик 15 служит для записи программы молота в блоке 16 оперативной памяти, который обеспечивает длительное хранение заданной программы и выдачу ее на соответствующие элементы устройства в режиме считываиия. Генератор 17 тактовых сигналов обеспечивает синхронность работы блока 10 автоматического управления и блока 16 оперативной памяти. Блок 18 сравнения вырабатывает управляющий сигнал при равенстве двоично-десятичных кодов, поступающих с выхода блока 16 оперативной памяти и с выхода счетчика 19. Выходной сигнал блока 18 сравнения поступает на блок 10 автоматического управления и на вход установки в нуль счетчика 19. Счетньм вход С счетчика 19 соединен с выходом блока 20 управления счетчиком, определяющего режим счета единиц выдержек времени или количества ударов бабы 21 молота в зависимости от команды Вьиержка времени (ВВ), поступающей с блока 16 оперативной памяти, и ее инверсии, поступающей с выхода элемента НЕ 22. Генератор 23 вьщает импульсы стабильной частоты, поступающие в блок 11 коррекции энергий удара молоти и в элемент 24 задержки, позволякмций изменять масштаб единиц выдержек времени. Первый датчик 25 и второй датчик 26 положения бабы молота, установленные на стани844
не 1 молота так, что имеют возможность перемещения в зависимости от высоты поковки при неизменном расстоянии между ними, предназначены для косвенного определения энергии удара молота по скорости перемещения бабы. Датчики 25 и 26 контролируют момент прохождения бабой 21 молота определенных положений, а датчик 26 используется также для счета количества ударов молота. Блок 27 эталонных на-, пряжений осуществляет преобразование кода энергии удара в аналоговый сигнал. Блок 10 автоматического управления состоит из кнопки 28 Пуск, кнопки 29 Стоп, элемента И 30, триггера 31 запуска, элемента И 32, ждущего мультивибратора 33, вьтолненного в виде элемента И-НЕ 2,4, связанного своим выходом через интегрирующую цепочку, состоящую из резистора R1 и конденсатора С1, с первым входом другого элемента И-НЕ 4.1, второй вход которого связан с входом первого элемента И-НЕ 2.4. Блок 10 содержит также ключ 34, состоящий из транзистора, У2, коллекторного сопротивления R3 и подключенных к базе транзистора У2 диода У1 и резистора R2. Блок 20 управления счетчиком содержит первый 35 и второй 36 элементы И, а также элемент ИЛИ 37. Блок 11 коррек1щи энергии удара содержит элемент ИЛИ 38, триггер 39, управляемьш сигналами датчиков 25 и 26, элемент И 40, элемент 41 задержки, счетчик 42, подсчитывающий импульсы генератора 23 за время между срабатыванием датчиков 25 и 26, блок 43 сравнения, регистр 44, дифференцирующую цепочку 45 и цифроаналоговый преобразователь 46, формирующий управляниций. сигнал, равный разности заданной и фактической энергии удара.
Дифференцирукнцая цепочка 45 состоит из элемента И-НЕ Д7, резистора R1 и конденсатора Сд, цифроаналоговый преобразователь 46 включает в себя преобразователь код-аналог Д8 и дифференциальный усилитель Д10. В схемах фиг. 1,2, и 3 приняты спедукнцие сокращенные обозначения: команда КИ - конец программы; команда ВВ выдержка времени/ С - счетный вход счетчика} Р - вход установк.1 в нуль счетчика.
Устройство управления обеспечивает следующие реж1шы работы: Ручной,
Задание программы, Цикл, Автомат.
При подаче энергоносителя в среднюю полость золотника 5 баба 21 моота занимает исходное верхнее поожение. Шток 3 гидроцилиндра 2 в этом случае также находится вверху. ежим работы молота определяется поожением переключателя 13 режимов работы. Режимы запись или считывание рограммы блока 16- оперативной памяти определяется положением переключателей (не указаны) задатчика 15.
В режиме Ручной задающий сигнал поступает с узла 14 ручного управления, выполненного, например, в виде рукоятки или педали, через переключатель 13 режимов работы на вход сумирующего устройства 9. Величина энергии удара паровоздушного молота зависит- ОТ величины перемещения зоотника 5, которое определяется сигналом с узла 14 ручного управления, поступающим на вход суммирующего устройства 9, на отрицательный вход которого подается сигнал с датчика 12 обратной связи, установленного на штоке 3 гидроцилиндра 2. Сформированное на выходе суммирующего устройства 9 напряжение, пропорциональное разности задающего сигнала и сигнала обратной связи, усиливается усилитеем 8 и управляет электрогидроусилителем 6. При этом шток 3 гидроцилиндра 2, а следовательно, и золотник 5 перемещается до тех пор,/пока сигнал обратной связи станет равным задающему сигналу. Произойдет удар с заданной энергией. Система возвращается в исходное состояние, если задающий сигнал на выходе узла 14 ручного управления станет равным исходному.
В режиме Задание программы блок 16 оперативной памяти переводится в режим записи программы, баба 21 молота находится при этом в исходном верхнем положении. Оператор по технологической карте изготовления детали с задатчика 15 заносит программу в блок 16. оперативной памяти в виде команд с их численными значениями. При программировании используются следующие команды: СО - совместная отработка, Е1, E2....EN- фиксированная величина энергии удара; ВВ - выдержка времениJ КП - конец программы Программа заносится в блок 16 оперативной памяти в виде кадров отработки, состоящих из команд с .их численными значениями.
Режим Цикл отличается тем, что молот отрабатывает программу один раз 5 по команде Пуск. Останов осуществляется по команде KTi с блока 16 оперативной памяти.
Режим Автомат характерен тем, что молот.многократно отрабатывает за писанную в блоке 16 оперативной памяти программу. Чтобы остановить отра- . ботку программы по команде КП необходимо перевести устройство управления в р.ежнм работы Цикл. Срочный
15 останов во всех режимах осуществляется при нажатии кнопки 29 Стоп, при этом триггер 31 запуска запрещает прохождение импульсов тактового генератора 17 через элемент И32, одновре20 менно вторая цепь (не показана) кнопки 29 Стоп запрещает считывание программы с блока 16 оперативной памяти. В этом случае продолжить работу молота, начиная с прерванной команды,
МОЖНО, нажав кнопку Пуск.
Работа устройства управления.паровоздушным молотом рассматривается в режиме Цикл (как наиболее сложном и характерном).
0 В режиме Цикл блок 16 оперативной памяти находится в режиме считывания программы. Команда энергии удара в двоичном коде поступает из блока 16 оперативной памяти в блок 27
5 эталонных напряжений, в котором осуществляется преобразование кода энергии удара в аналоговый сигнал,поступающий на ключ 34 блока 10 автоматического управления. Отработка прог-..
0 раммы начинается при нажатии на кноппу 28 Пуск, при отсутствии команды ВВ и неравенстве кодов на входах блока 18 сравнения, при этом на входах элемента И 32 присутствуют сигна5 лы, разрешающие прохождение импульсов тактового генератора 17, запускающих ждущий мультивибратор 33. Ждущий мультивибратор 33 выдает импульс напряжения определенной длительное-
0 ти, открывающий ключ 34, через который управляющий сигнал с выхода блока 27 эталонных напряжений подается через переключатель 13 режима работы на положительный вход сумми-
5 рующего устройства 9, на отрицательный вход которого поступает сигнал с датчика t2 обратной связи. На выходе суммирующе-го устройства 9 вырабатывается результирующее напряжение, которое через усилитель 8 поступает на электрогидроусилитель 6. Электрогидроусилитель 6 увеличивает подачу жидкости в верхнюю и уменьшает в нижнюю полость гидроцилиндра 2, шток 3 которого при это}4, перемещаясь вниз, через систему рычагов 4 открывает золотник 5 управления молота Перемещение штока 3 бсуществляется до тех пор, пока напряжение с выхода датчика 12 обратной связи сравняется с задающим напряжением блока 27 зталонньй напряжений. Таким образом, энергия удара, зависящая от величины перемещения золотника 5, определяется напряжением на выходе блока 27 эталонных напряжений, которое соответствует заданной программной энергии удара. При движении бабы 21 молота на удар срабатывает датчик 25, управляющий работой блока 11 коррекции энергии удара. Сигнал с датчика 25 устанавливает в единичное положение триггер 39, который разрешает прохождение импульсов генератора 23 через элементы И 40 на счетный вход счетчика 42. При сра.батыванИи второго датчика 26 прохождение импульсов прекращается, а двоичный ход разности заданной энергии удара, поступающего на вход блока 43 сравнения с выхода блока 16 оперативной памяти и фактической, определяемой как количество импульсов, поступивших на вход счетчика 42 за время между срабатыванием датчиков 25 и 26-,записывается в регистр 44.После того как результирующий код запомнится, в регистре 44, элемент 41 задержки вьщает сигнал, обнуляющий триггер 39 и счетчик 42. Задержка времени .элемента задержки 41 выбирается такой, что баба 21 молота успевает занять исходное верхнее положение. Корректирующий сигнал с блока 11 коррекции энергии удара вводится в суммирующее устройство 9 при произведении Следующего удара, при этом управляющий сигнал с выхода ждущего мультивибратора 33 через дифференцирующую цепочку 45 переводит регистр 44 в режим считывания. Код разницы заданной и фактической энергии удара с выхода регистра 44 поступает на цифроаналоговый преобразователь 46, с выхода которого аналоговый корректирующий сигнал поступает через переключатель 13, отключающий блок 11 коррекции
энергии удара в ручном режиме, на положительный -вход суммирующего устройства 9. Сигнал с второго датчика 26 поступает также на блок 20 управления счетчиком, который работает или в режиме счета единиц выдержек времени, или в режиме счета количества ударов, который определяется командой ВВ. Если команда ВВ отсутствует, то открыт элемент И35 и на счетный вход счетчика 19 поступают импульсы с датчика 26, которые определяют количество ударов бабы 21 молота. Фактическое количество ударов с выхода счетчика 19 поступает на вход блока 18 сравнения, на другой вход которого поступает код заданного количества ударов с блока 16 оперативной памяти. При равенстве кодов заданного и фактического количества ударов на выходе блока 18 сравнения появляется нулевой логический сигнал, запрещающий прохождение импульсов тактового генератора 17 через элемент И32. В следующий такт блок 16 оперативной памяти переводится в режим считывания очередной команды, если это команда ВВ, то блок 20 управления счетчиком переводится в режим счета единиц выдержек времени, при этом открьшается элемент изб и импульсы с генератора 23 через блок 24 вьщержек времени, имеющего- возможность с помощью многопозиционного десятичного переключателя (не показан) изменять масштаб единицы вьщержек времени, поступают на счетный вход счетчика 19. При равенстве заданной и фактической вьщержек времени сигнал с выхода блока 18 блока сравнения обнуляет счетчик 19. При поступлении с блока 16 оперативной памяти следующей команды работа устройства происходит аналогично описанному. Команда КП перебрасывает триггер 31 запуска в нулевое положение и работа устройства блокируется. Возобновление работы возможно только при повторном нажатии на кнопку 28 Пуск Аналогично работает устройство и в режиме Автомат, но не отключается после выполнения очередного цикла ковки.
На фиг.2 показана функциональная схема блока 10 автоматического управления, которая работает следующим образом. При нажатии на кнопку 28 Пуск триггер 31 запуска переводит- ся во включенное состояние, в которо на прямом выходе появляется логическая единица, поступающая на второй вход элемента И32, если при этом на третий вход элемента И32 с элемён та НЕ 22 поступает логическая единица, означакицая отсутствие команды Вьщержка времени, и на четвертьй вход элемента И32 со счетчика 18 также поступает единичный логический сигнал, означающий, что не произведено заданное количество ударов, то через элемент И 32 проходят импульсы с тактового генератора 17. Импульсы с выхода элемента Ц 32 поступают на вход ждущего мультивибратора 33. Работает ждущий мультивибратор 33 по сигналу с выхода элемента И 32, который поступает одновременно на вход элемента И-НЕ Д2.4 и на второй вход элемента И-НЕ Д4.1, при этом на выходе элементов. И-НЕ Д2.4 и Д4.1 появляются логические нули, если при этом на входе ждущего мультивибратора 33 будет оставаться единичный сиг нал, на выходе элемента И-НЕ Д4.1 появится логическая единица через время разряда конденсатора С1, которое определяется постоянной времени .C1. Таким .образом, ждущий мультивибратор 33 выдает импульс определенной длительности, необходимой для произведений удара молота, С выхода ждущего мультивибратора 33 сигнал поступает на вход ключа 34, работающего следующим образом. На базу транзистора 2 через диод У1 со ждущего мультивибратора 33 поступает единичньй положительный сигнал, от. крывающий транзистор У2,. при этом потенциал его коллектора, являющийся выходным для блока 10 автоматического управления, практически равен нулю, В момент произведения удара, как уже отмечалось выше, на входе ключа 34 появляется логический нуль, не вли яющий на работу транзистора У2, которьй в этот момент выполняет роль усилителя постоянного тока, усиливая сигнал, поступающий с блока 27 эталонных напряжений через резистор R 2 на базу транзистора У2 а усиленный сигнал с коллектора транзистора У2 поступает на вькод блока 10 автомати ческого управления. Резистор Я 3 явля ется коллекторной нагрузкой транзистора У2 и определяет коэффициент усиления каскада. Останов происходит йри нажатии на кнопку 29 Стоп или по команде КП, которые .переводят триггер 31 запуска в выключенное состояние. Блок 11 коррекции энергии ударов (фиг,3) работает следующим образом. Сигнал с первого путевого выключателя 25 устанавливает в единичное положение триггер 39, который разрешает прохождение импульсов генератора 23 через элемент И 40 на счетный вход счетчика 42. Данный вариант схемы блока 11 коррекции энергии удара соответствует четырехразрядному двоичному коду задания энергии удара. С выхода счетчика 42 код фактической энергии удара поступает на блок 43 сравнения, на другой вход которого поступает код заданной энергии удара с блока 16 ойеративной памяти. В блоке 43 сравнения происходит поразрядное сравнение обоих кодов, код разницы последних поступает на входы регистра 44. При срабатывании второго конечного-выключателя 26 сигнал с выхода элемента ИЛИ 38 переключит триггер 39 в нулевое состояние и элемент И 40 закрывается, при этом сигнал на выходе блока 43 сравнения будет определять ошибку отработки энергии удара. Запись информации в регистр 44, сброс триггера 39 и счетчика 42 происходит по сигналу с инверсного выхода триггера 39, который хранится с помощью элемента 41 задержки, определяемой временем разря-. да емкости С1 (задержка сигнала необ ходима для того, чтобы баба молота заняла исходное верхнее положение), Сигнал коррекции вводится в момент следующего удара, когда нулевой импульс с блока 10 автоматического управления поступает на дифференцирующую цепочку 45, кратковременный импульс с которой открывает буферные клапаны Д9 регистра 44 и пропускают код разности энергий удара на цифроаналоговый преобразователь 46, с выхода которого аналоговый результирующий сигнал поступает на вход переключателя 13 режимов работы, В представленной на фиг,3 схеме блок 43 сравнения представлен схематично, реально он может быть выполнен в виде реверсивного сумматора, один разряд которого несет информацию о полярности результирующего кода и управляет полярностью опорного напряжения цифроаналогового преобразователя 46. i
113158412
Эффективность использования уст- поковок, а также расширения воаможройства управления паровоздушньм костей использования оборудования молотом достигается за счет повьше- при одновременнем повышении стания точности дозирования энергии бильности технологического процесудара, а, следовательно, и качества 5 са.


| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления штамповочным молотом | 1982 |
|
SU1034823A1 |
| Система управления штамповочным молотом | 1986 |
|
SU1388173A1 |
| Система управления паровоздушным штамповочным молотом | 1985 |
|
SU1310087A1 |
| Система управления пневматическим молотом с закрепленным на станине ресивером | 1983 |
|
SU1076175A1 |
| Система управления молотом | 1982 |
|
SU1060290A1 |
| Горизонтальный бесшаботный молот с электромагнитным приводом | 1982 |
|
SU1045989A1 |
| Устройство для управления автоматизированным прессовым оборудованием | 1983 |
|
SU1131678A1 |
| Цифровое устройство для управления автономным инвертором | 1988 |
|
SU1675846A1 |
| Цифровое устройство управления весовым дозированием | 1983 |
|
SU1177680A1 |
| Система управления молотом | 1983 |
|
SU1082536A1 |
УСТРОЙСТВО УПРАВЛЕНИЯ ПАРОВОЗДУШНЫМ МОЛОТОМ, содержащее распре- делительный золотник с приводом, узел управления приводом этого золотника, переключатель режимов работы, датчики положения бабы молота и узел ручного управления, при этом распределительный золотник соединен своими полостями с рабочим цилиндром молота, атмосферой и источником энергоносителя, а через рычаги - с приводом распределительного золотника, вход которого подключен к узлу управления этого привода, причем датчики положе- ния бйбы молота и переключатель режимов работы соединены с узлом ручного управления, отличающееся тем, что, с целью улучшения качества поковок путем повьипения точности дозирования энергий удара, оно снабжено датчиком обратной связи, усилителем, сз мматором, счетчиком с блоком управления счетчика,задатчиком, элементами НЕ и задержки, генераторами тактовых импульсов и стабильной частоты, а также блоками автоматического управления, коррекции энергии удара, сравнения, оперативной памяти и эталонных напряжений, при этом привод распределительного золотника выполнен в виде гидроцилиндра, а узел управления приводом распределительного золотника - в виде электрогидроусилителя, соединенного своим входом с усилителем, вход которого соединен с выходом сумматора, входы которого связаны с выходами переключателя режимов работы и датчиком обратной связи, установленном на штоке гидроцилиндра, входы блока автоматического управления соединены с выходами элемента НЕ, блоков сравнения оперативной памяти и эталоннык напряжений, а О) также генератора тактовых импульсов, а выходы блока автоматического управления связаны с переключателем режимов работы и входом блока коррекции энергии ударов, другие входы которого связаны с выходами блока оперативной памятиf генератора стабильной частоты и двумя датчиками положения бабы молота, выход блока корlAd рекции энергии удара подключен к переключателю режимов работы, причем ел входы блока управления счетчиком эо связаны с выходами блока оперативной памяти, элементов НЕ и задержки, вход которого соединен с выходом генератора стабильной частоты, а выход - со счетчиком, соединенным своими выходами с входом блока сравнения, к другим входам крторого подключены выходы блока оперативной памйти, входы которого связаны с задатчиком и генератором тактовых сигналов.
Оя iiMLЯ imnn-te фуеЗ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| (прототип). | |||
