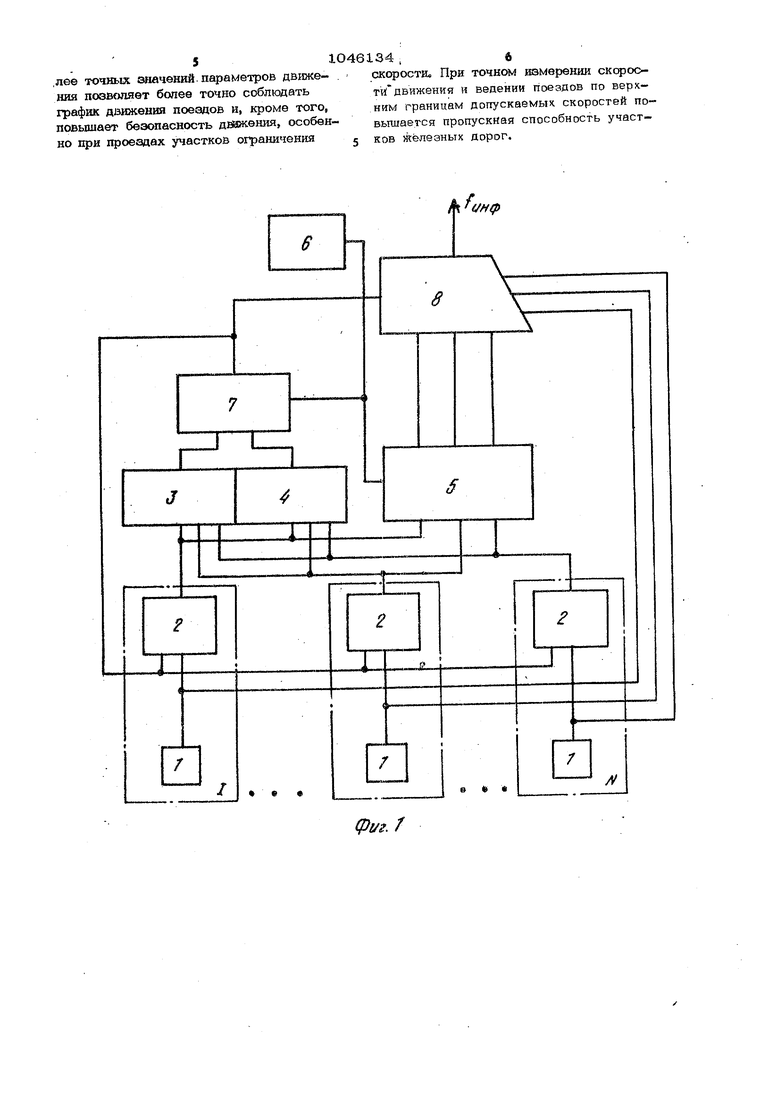
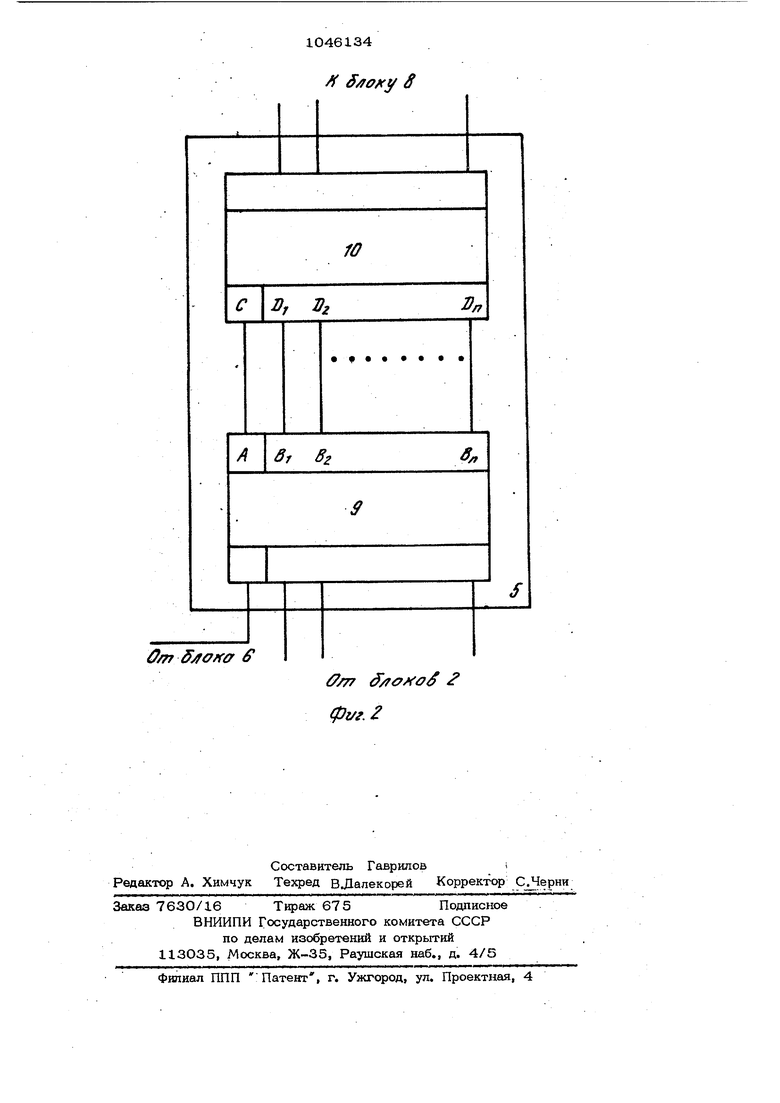
Изобретение относится к автоматизации управления транспортиьгми средствами и предназначено для использования на железнодороисном подвижном составе для измерения параметров движения локомотива, а именно: пути, скорости, уско рения или частоты вращения колесных пар локомотива для обнаружения буксования или юза. Известно устройство для измерения параметров движения транспортного средства, содержащее импульсные датчики частоты вращения ведущих колесных пар, каждый из котфых соединен своим выхо дом с одним из входов соответствующего блока предварительного счета, логически элементы И и ИЛИ и управляемый комму татор С 1 3 . Однако известное устройство имеет ограниченные возможности по регулировк числа импульсов для отсчета пройденного локомотивом пути или вычисления скорос ти. Точность этого устройства определяе ся емкостями блоков предварительного и оконечного счета. Цель изобретения - повьпиение точнос устройства. Поставленная цель достигается тем, что устройство для измерения параметров движения транспортного средства, содержащее импутшсные датчики частоты вращения ведущих колесных пар, каждьШ из которых соединен своим выходом с одним иэ входов соответствующего блока предварительного счета, логические элементы И и ИЛИ и управляемый коммутатор, снабжено анализатором состояния блоков предварительного счета, управляемым I коммутатором с памятью и задатчиком управления, выход котсрого сое|динеч с управляемыми входами анализато ра состояния блоков предварительного счета и управляемого коммутатора, другие входы которого соединены с выходами логических элементов И и ИЛИ, а выход - с другими входами блоков предварительного счета и одним из входов управляемого коммутатсра с памятью, другие входы которого соединены с выходами анализатора состояния блоков предварительного счета, а третьи входы - с выходами импульсных датчиков частоты вращения ведущих колесных пар, причем выходы блоков предварительного счета подключены к входам логических элементов И и ИЛИ и к другим входам анализатора состояния блоков предварительного счета, а выход управляемого коммутатора с памятью предназначен для подключения блока регистрации параметров движения транспортного средства, При этом, анализатор состояния блоког предварительного счета состоит из логической матрицы и регистра, причем входы логической матрицы и вьксеы регисрра являются соответственно входами и выходами анализатора состояния блоков предварительного счета, а выходы логи- ческой матрицы число которых равно числу входов, соединены с входами регистра, при этом общий выход логической матрицы соединен с входом управления записью регистра. На фиг. 1 приведена схема устройства для измерения параметров движения транспортного средства, на фиг, 2 - схема анализатора состояния блоков предварительного счета. Устройство для измерения параметров движения транспортного средства содержит импульсные датчики 1 частоты вращения ведущих колесных пар (фиг. 1), соединенные своими выходами с одним из входов блоков 2 предварительного счета, выходы которых подключены к входам логических элементов 3 И и 4 ИЛИ и другим входом анализатора 5 состояния блоков предварительного счета, управляющий вход которого подключен к выходу аадатчика 6 режимов движения, управляемый коммутатор 7, управляющий вход которого соединен с выходом задатчика 6 режимов движения, другие входы - с выходами логических элек; ентов И и ИЛИ,а выход - с другими входами блоков 2 предварительного счета и одним из входов управляемого коммутатора 8 с памятью, другие входы которого соединены с выходами анализатора 5 состояния блоков предварительного счета, а третьи входы - с выходами импульсных датчиков 1 частоты вращения ведущих колесных пар. При этом, выход управляемого, коммутатора 8 с памятью предназначен для подключения блока регистрации параметров движения транспортного средства (на фиг. 1 не показан). Анализатор 5 состояния блоков предварительного счета состоит из логической матрицы 9 и регистра 10 (фиг. 2), причем входы V Х -Лр логической матрицы 9 и выходы регистра 10 являются соответственно утфавляющими и другими входами и выходами анализатора 5 .состояния блоков предварительного счета, а выходы А и В - В логической матрицы 9, число которых равно числу входов, соединены с входами С и D - D регистра 10. При этом общий выход А логической матрицы 9 соединен с входом С управления записью регистра. Устройство работает следующим образом. Импульсные датчики 1, установленны на каждой колесной паре, вырабатывают последовательность импульсов с частотой, прямо пропорциональной частоте вращения соответствующей колесной пары Импульсы от каждого датчика 1 поступа ют непосредственно в блок 2 предварительного счета. Сигналы с выхода каждого блока 2 поступают на входы логических элементов 3 И и 4 ИЛИ, а также на вход а 1алкзатора 5 состояния блоков предварительного счета. На выходах логических элементов 3 И и 4 ИЛИ с интервалом времени, обуславливаемым во-пер вых, емкостью блоков 2 предварительно го счета, а во-вторых, разницей величин частот следования импульсов от импульс ных датчиков 1, каждого из N каналов, появляются сигналы, подаваемые на вхо управляемого коммутатора 7. В зависимости от состояния задатчик 6 режимов движения различают два реж ма работы локомотива - Тяга и Выбег, что является определяющим в про цессе выбора канала от одного из дат чиков 1, частота следования импульсов в котором и принимается за информацио ную частоту и поступает на выход устройства. При наличии управляющего сигнала на входе управляемого коммутатора 7, например, Тяга, на выходе коммутируется сигнал от логического элемента 3 который служит управляющим сигналом дл управляемого коммутатора 8 с памятью и сигналом установки в ноль блоков 2. При наличии управляющего сигнала на входе управляемого коммутатора 7 Выбег, на выходе коммутируется сигнал от логического элемента 4 ИЛИ, который служит управляющим сигналом для управляемого коммутатора с памятью 8 и сигналом в ноль блоков 2. Анализатор 5 состояния блоков предварительного счета производит анализ состояния выходов блоков 2 в соответствии с управляющим сигналом Тяга шш Выбег. Анализатор 5 при поступлении на управляющий вход сигнала Вы бег формирует на выходе, соответствующем первому заблокировавшемуся бло- 1 344 у 2, логической 1, удерживая а остальных выходах независимо от остояния других блоков 2 сигнал лоический О. При поступлении на управляющий вход нализатора 5 сигнала Тяга на его ыходе, соответствующем последнему аблокировавшемуся блоку 2, формщэуетя сигнал логической 1. Управляемый коммутатср 8 с памятью о управляющему сигналу управляемого коммутатфа 7 запоминает состояние выходов анализатора 5 и коммутирует на своем выходе входную частоту соответ ствующего импульсного датчика. Это состояние коммутатора 8 сохраняется до прихода следующего управляющего сигнала от управляемого KOMMyTaTqpa 7. Логическая 9 по входу управления управляется сигналом Тяга или Выбег от задатчика 6. Логическая матрица анализирует выходы блоков 2 и форМ1фует всегда только на определенном своем выходе в зависимости от значения управляющего сигнала Тяга итя Выбег. Сигнал на выходе В матрицы 9 по- является тогда и только тогда, когда заполняются все блоки 2 предварительного счета за исключением того, который подключен к входу Л,- матршы 9. Такое фqpмиpoвaниe выхода В- соответствует режиму Тяга. В ренсиме Выбег на выходе В появляется тогда и только тогда, когда первым заполняется блок 2 предварительного счета, подключенный к входу. , На общем выходе А логической матрицы 9, независимо от значе1шя сигнала на управляющем входе, реализуется следующая логическая функция По этому сигналу производится запись сигналов с выходов логической матрвды в регистр, выходы которого управляю коммутатором 8 с памятью. Частота на вьцсоде управляемого коммутатора 8 с памятью и является информационной частотой. Путем ее обработки возможно получать различные параметры движения локомотива: путь, скорость, ускорение, а также обнаруишвать буксование и юз колесных пар. Устройство позволяет измерять инфор- мационную частоту с точностью до сздного импульса датчика 1, что в свою очередь гарантирует более точное измерение параметров движения, чем при счете порциями импульсов. Использование бо,лее точных эначений параметров движешш позволяет более точно соблюдать график движения поездов и, кроме того, повьшдает безопасность двавкения, особенно при проездах участков ограничения
скорости. При точном 11:юмерении скорости движения и ведении поездов по верхним границам допускаемых скоростей повышается пропускная способность участков железных дорог.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство противобоксовочной защиты локомотива | 1981 |
|
SU1004163A1 |
| Устройство обнаружения юза и боксования | 1981 |
|
SU965820A1 |
| Устройство обнаружения буксования и юза колесных пар электроподвижного состава | 1982 |
|
SU1093577A1 |
| Устройство для измерения скорости и скольжения колесных пар транспортного средства | 1983 |
|
SU1111903A1 |
| Устройство для измерения параметров движения транспортного средства | 1985 |
|
SU1289709A1 |
| Устройство для измерения скорости и пути, пройденного локомотивом | 1971 |
|
SU457030A1 |
| АНАЛИЗАТОР ПАРАМЕТРОВ ДВИЖЕНИЯ ЛОКОМОТИВА | 2012 |
|
RU2526730C2 |
| Устройство для предотвращения боксования тепловоза | 1981 |
|
SU994311A1 |
| АНАЛИЗАТОР РЕЖИМОВ ТЯГОВОГО СРЕДСТВА | 2000 |
|
RU2192668C2 |
| Устройство для измерения пути пройденного локомотивом | 1979 |
|
SU787236A1 |
1.УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРСе ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА, содерл ащее импульсные датчики частоты вращения ведущих колесных пар, каждый из которых соединен своим выходом с одним из входов соответствующего блока предварительного счета, логические элементы И и ИЛИ и управляемый коммутатор, отличающееся тем, что, с целью по:вышения точности, оно снабжено анализа- тором состояния блоков предварительного счета, управляемым коммутатором с памятью и задатчиком режимов движения, выход которого соединен с управляемыми входами анализатора состояния блоков предварительного счета и управляемого коммутатора, другие входы которого сое.динены с выходами логических эломеиI тов И и ИЛИ, а выход - с другими входами блоков предварительного счета и одним из входов управляемого коммут.атора с памятью, другие входы которого соед1шены с выходами анализатора состояния блоков предварительного счета, а третьи входы - с выходами импульсных датчиков частоты вращения ведущих колесных пар, причем выходы блоков предварительного счета подключены к входам логических элементов И и ИЛИ и к другим входам анализатора состояния блоков предварительного счета, а выход управляемого коммутатора с памятью Q предназначен для подключенги блока ре. (Л гистрации параметров движения транспортного средства. 2. Устройство по п. 1,отличаю щ е е с я тем, что анализатор сое- тояния блоков предварительного счета состоит из логической матр1щы и регистра, причем входы логической матрицы и выходы регистра являются соответст4 венно входами и выходами анализатора О состояния блоков предварительного счета, а выходы логической матрицы, число косо торых равно числу входов, соединены с 4ii входами регистра, при этом общий вькод логической матрицы соединен с входом управления записью регистра.
Cpt/s.f
/У S/fff y S
ff/77
фг/г.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения скорости и пути, пройденного локомотивом | 1971 |
|
SU457030A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
