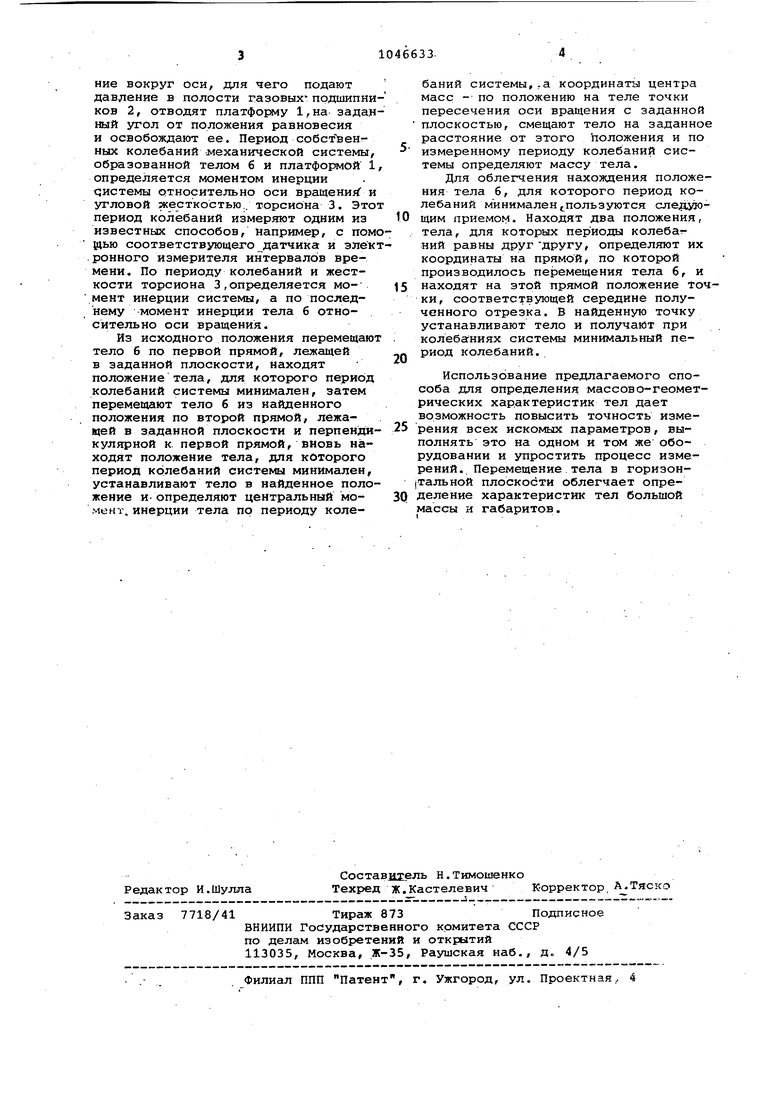
Изобретение относится к измерительной технике и может быть использовано при комплексном определении iмассово-геометрических характеристик твердых тел. Известен способ определения центрального момента инерции и координат центра масс в заданной плоскости, заключающийся в том, что тело устанавливают на платформу, ось вращени которой .перпендикулярна заданной пло кости, сообщают платформе возвратно-поступательное движение вдоль оси вращения и колебательное вращательное движение вокруг той же оси, определяют положение тела, соответствующее его устойчивому равновесию на платформе, определяют коорадинаты центра масс по положению на теле, точки пересечения оси вращения с заданной плоскостью, закрепляют тело в этом положении, сообщают платформе с телом колебательное движение вокруг оси, измеряют период колебани системы и по периоду определяют цент ральный момент инерции . ,Однако способ сложен в осуществ Ленин и не дает возможности одновременно определять массу тела. Наиболее близким к изобретению по технической сущности и достигаемым результатам является способ определения центрального момента инерции и координат центра масс в заданной плоскости и массы тела, заключаю щийся в том, что тело, устанавливают и закрепляют на платформе, ось-вращ кия которой расположена горизонталь но и перпендикулярно заданной плоскости, сообщают платформе с телом колебательное движение вокруг оси, как физическому маятнику, измеряют параметры движения - период-колебаний .и координаты оси вращения в сис теме координат, связанной с телом образованной телом и платформой механической системы, заданное число раз (не менее трех / параллельным перемещением в заданной плоскости устанавливают тело зместе с платфор мой в новое относительно оси .вращения и повторяют измерение параметро движения .системы,, а по ним решением системы уравнений определяют центра ный момент инерции, координаты цент ра масс и массу . I , Однако известный способ не дает высокой точности определения указан ных параметров вследствие того, что стабильность периода колебаний тако системы невысока и определяется соо ношением момента силы трения в подшипниках оси вращения платформы и возвращающего момента физического м ятника. Целью изобретения является повы1 1ение точности определения централь ного момента инерции и координат центра масс в заданной плоскости и массы тела, Эта цель достигается тем, что согласно способу определения централь-ного момента инерции к координат центра масс в заданной плоскости и массы тела, заключаю1демуся в том, что тело устанавливают на платформу, ось, вращения которой перпендикулярна заданной плоскости, сообща-. ют пла.тформе движение вокруг осии измеряют параметрадвижения образоваиной телом -и платформой механической системы., заданное число раз параллельным перемещением в заданной ПЛОСКО.СТИ устанавливают тело в новое положение и повторяют измерение параметров движе.ния системы, а по ним определяют центральный момент инерции, координаты центра масс и массу тела, используют платформу с опрокинутым унифилярным подвесом и газовыми подшипниками, во всех положениях тела сообщают платформе колебательное движение вокруг оси, а в качестве, параметра движения механической системы измеряют период колебаний, по которому определяют соответствующий момент инерции системы/ из исходного положения перемещают тело по первой прямой, лежащей в заданной плоскости,- находят положение тела, для которого период колебаний системы минимален, затем перемещают тело из найденного положения по второй прямой, лежащей в заданной плоскости и перпендикулярной к первой прямой, вновь находят положение тела, для которого период колебаний системы минимален , устанавливают тело в найденное положение и определяют центральный момент инерции тела по периоду колебаний системы, а координаты центра масс - по положению на теле. точки пересечения оси в.ращеиия с заданной плоскостью, смещают тело .на з.аданное расстояние от этого положения и по измеренному периоду колебаний системы определяют массу те- . ла. . На чертеже представлена схема платформы с опрокинутым унифилярным подвесом и газовыми подшипниками. Платформа 1 располагается горизонтально, опирается на газовые подшипники 2 и жестко соединена с одним Концом торсиона 3, другой конец которого закреплен в центре мембраны 4, установленной в основании 5 корпуса. Исследуемое тело б устанавливают на платформу 1 и при необходимости закрепляют соответствующими приспособлениями (не показаны). . Способ осуще.ствляют следующим образом. Тело устанавливают на платформу 1 в произвольном положении, сообщают платформе колебательное движение вокруг оси, для чего подают давление в полости газовых подшипников 2, отводят платформу 1,на заданный угол от положения равновесия и освобождают ее. Период собственных колебаний механической системы, образованной телом 6 и платформой 1, определяется моментом инерции системы относительно оси вращений и угловой жесткостью., торсиона 3. Этот период колебаний измеряют одним из известных способов, например, с помоцью соответствующего датчика и элект.ронного измерителя интервалов времени. По периоду колебаний и жесткости торсиона 3,определяется момент инерции системы, а по последнему момент инерции тела 6 относительно оси вращения.
Из исходного положения перемещают тело 6 по первой прямой, лежащей в заданной плоскости, находят положение тела, для которого период колебаний системы минимален, затем перемещают тело 6 из найденного положения по второй прямой, лежащей в заданной плоскости и перпендикулярной к. первой прямой, вновь находят положение тела, для которого период колебаний системы минимален, устанавливают тело в найденное положение и-определяют центральный момент, инерции тела по периоду колебаний системы,.а координаты центра масс - по положению на теле точки пересечения оси вращения с заданной плоскостью, смещают тело на заданное расстояние от этого положения и по измеренному периоду колебаний системы определяют массу тела.
Для облегчения нахождения положения тела 6, для которого период колебаний минимален,пользуются щим приемом. Находят два положения, тела, для которых колебагний равны друг другу, определяют их координаты на прямой, по которой производилось перемещения тепа 6, и находят на этой прямой положение точки, соответствующей середине полученного отрезка. В найденную точку устанавливают тело и получайт при колеба ниях системы минимальный период колебаний.
Использование предлагаемого способа для определения массово-геометрических характеристик тел дает возможность повысить точность измерения всех искомых параметров, выполнять это на одном и том же оборудовании и упростить процесс измерений. Перемещение, тела в горизон|тальной плоскости облегчает опре0 деление характеристик тел большой массы и габаритов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОВЕРКИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ СТЕНДА ДЛЯ ОПРЕДЕЛЕНИЯ МАССО-ЦЕНТРОВОЧНЫХ И МАССО-ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК ТВЕРДОГО ТЕЛА ВРАЩЕНИЯ | 2010 |
|
RU2445592C1 |
| Стенд для измерения массы, координат центра масс и моментов инерции изделий | 2024 |
|
RU2830397C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ И КООРДИНАТ ЦЕНТРА МАСС ТЕЛА В ЗАДАННОЙ ПЛОСКОСТИ | 2010 |
|
RU2448336C2 |
| Способ определения погрешности стенда для измерения характеристик геометрии масс изделий и устройство для его осуществления | 2019 |
|
RU2722962C1 |
| Устройство для определения инерционных характеристик протяженных изделий | 2017 |
|
RU2697442C2 |
| Способ измерения распределения массы | 1986 |
|
SU1425459A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА | 2014 |
|
RU2575184C1 |
| Способ определения механических параметровТЕлА | 1976 |
|
SU834424A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2008 |
|
RU2368880C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ И КООРДИНАТ ЦЕНТРА МАСС ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2348020C1 |
СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕНТРАЛЬНОГО МОМЕНТА ИНЕРЦИИ И КООРДИНАТ ЦЕНТРА МАСС В ЗАДАННОЙ ПЛОСКОСТИ И МАССЫ ТЕЛА, заключаюищйся в том, что тело устанавливают на платформу, ось вращения которой перпендикулярна заданной плоскости, сообщают платформе движение вокруг оси и измеряют параметры движения образованной телом и платформой механической системы, заданное число раз параллельным перемещением в заданной плоскости устанавливёиот Tejjo в новое положение и повторяет измерение параметров движения системы, а по ним определяют центральный момент инерции, координайл центра масс и массу тела, о т л и чающийся тем, что, с целью повышения точности, используют платформу с опрокинутым унифилярным подвесом и газовыми подшипниками, во всех положениях тела сообщают платформе колебательное движение вокруг оси, а в качестве параметра движения м еханичёской системы измеряют период колебаний, по которому определяют соответствуюпщй момент инерции системы, из исходного положения перемещают тело по первой прямой, лежащей в заданной плоскости, находят положение тела, для которого период колебаний системы минимален, затем перемещают тело из найденного положения по второй прямой, лежащей в за-§ данной плоскости и перпендикулярной (О к первой прямой, вновь находят поло.жение тела, для которого период колебаний системы минимален, устанавливают тело в найденное положение и определяют центральный момент .g инерции тела по периоду колебаний системы, а координаты центра масс по положению и по измеренному периоду колебаний системы определяют ;массу тела. 65 :А9 :Р