4:
to
СП
1425459
Изобретение относится к приборостроению, а именно к способам измерения массы, не связанным с измерением силы тяжести.
Цель изобретения - повышение точности при упрощении измерений.
Способ заключается во вращении измеряемого тела в заданной плоскости вокруг произвольной фиксированной точки и нахождении положения тела, соответствующего экстремальной частоте его колебаний измерении расстояния между фиксированной точкой и еще двумя положениями осей, располо женньми в той же заданной плоскостиь
Распределение массы определяется с помощью математических зависимостей
измерением одного линейного параметра. Кроме того, при выборе произвольной точки для определения расстояний способ позволяет для разных тел производить одинаковые относительные измерения . Колебательные перемещения тела производятся под действием внеш10
15
а,,,
2,
.
а,5 х
Xj
где а;
j
коэффициенты, характеризующие положение тела и зависящие от искомых характеристик;
коэффициент, характеризующий восстанавливающую силу; искомые характеристики; масса, момент инерции, момент си,пы, масса составных частей;
момент инерции устройства относительно осей вращения.
под действием силы тяжести, что также упрощает процесс измерения и повышает точность измерения параметров колебаний.
На чертеже приведена схема устройства для реализации предлагаемого способа.
Исследуемый образец 1 установлен на платформе 2, имеющей ось 3 вращения, которая совершает колебательные .20 движения под действием пружины 4. На
г Т. - I, , чертеже обозначен : ш - масса образца; с - центр его тяжести.
Расстояние между торцом образца 1 и осью 3 вращения измеряется, напри25 мер, с помощью концевых мер. Жест- .у, кость пружины и момент инерции прибора определяются измерением параметров колебаний, установкой на платформу 2 эталонных масс с известным положением центра массы и известным моментом инерции.
Формула изобретения
k 41t
„ , гп -г / л.о J-
k
4
- ™ т
„ ...« j
30
35
Способ измерения распределения массы, включающий измерение координат и частот колебаний тела относительно трех параллельных осей, расположенных на разных расстояниях от его центра масс, отличающийся тем, 40 что, с целью повьшения точности при упрощении измерений, выбирают произвольную фиксированную относительно т.ела точку и вращением вокруг нее в заданной плоскости находят положение,
Способ измерения распределения массы, включающий измерение координа и частот колебаний тела относительно трех параллельных осей, расположенны на разных расстояниях от его центра масс, отличающийся тем, 40 что, с целью повьшения точности при упрощении измерений, выбирают произвольную фиксированную относительно т.ела точку и вращением вокруг нее в заданной плоскости находят положение
Все перемещения тела и измерения производятся для произвольно фиксированной относительно этого тела точки, а его вращение осуществляется в за-.
данной плоскости до получения экстре-45 соответствующее экстремальной часто- мальной частоты колебаний. Это позволяет получить две координаты положения центра масс тела по результатам одного эксперимента, а расположение осей вращения в одной плоскости огра-50 ничивает измерения положения тела
те его колебаний относительно одной из осей, после этого измеряют расстояния между выбранной точкой и осями, расположенными с ней в одной гшоскос- ти, а искомые величины находят из системы уравнений
I
измерением одного линейного параметра. Кроме того, при выборе произвольной точки для определения расстояний способ позволяет для разных тел производить одинаковые относительные измерения . Колебательные перемещения тела производятся под действием внеш
Способ измерения распределения массы, включающий измерение координат и частот колебаний тела относительно трех параллельных осей, расположенных на разных расстояниях от его центра масс, отличающийся тем, что, с целью повьшения точности при упрощении измерений, выбирают произвольную фиксированную относительно т.ела точку и вращением вокруг нее в заданной плоскости находят положение,
соответствующее экстремальной часто-
те его колебаний относительно одной из осей, после этого измеряют расстояния между выбранной точкой и осями, расположенными с ней в одной гшоскос- ти, а искомые величины находят из системы уравнений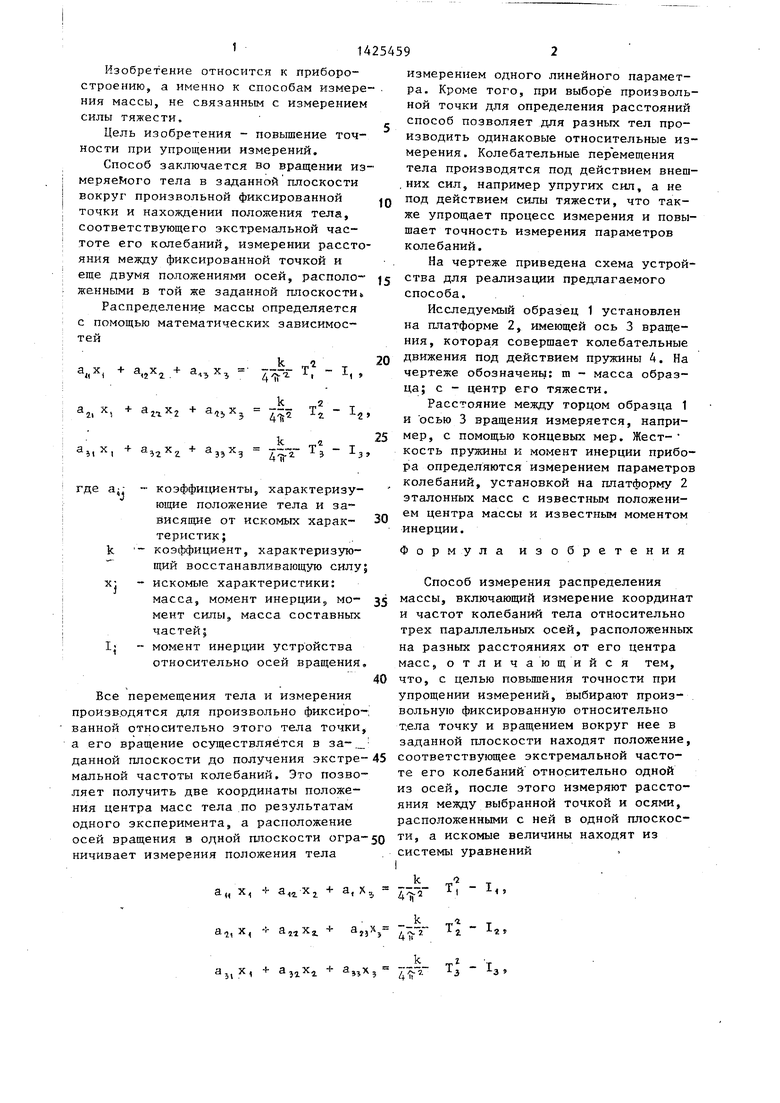
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения центрального момента инерции и координат центра масс в заданной плоскости и массы тела | 1982 |
|
SU1046633A1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2382999C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА | 2014 |
|
RU2575184C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ И КООРДИНАТ ЦЕНТРА МАСС ТЕЛА В ЗАДАННОЙ ПЛОСКОСТИ | 2010 |
|
RU2448336C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2008 |
|
RU2368880C1 |
| Способ определения веса отдельных частей неразделимого объекта | 1989 |
|
SU1703988A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА | 2002 |
|
RU2262678C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2200940C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
Изобретение относится к измерительной технике и позволяет повысить точность при упрощении измерений. Измеряемое тело вращают в заданной плоскости вокруг произвольно фиксированной относительно этого тела точки до получения экстремальной частоты колебаний относительно одной из осей. Измеряют расстояние между выбранной точкой и двумя осями, расположенными с ней в.одной плоскости. Колебательные перемещения тела осуществляются под действием внешних сил. Приведена система уравнений, из которой определяют искомые величины, 1 ил. с 
X. -I- а
.iX +
а,, X, -1-
а,, X,
а„х,, +
« 5
t-li f
- I
3
31Д25459
а-- - коэффициенты, характеризующие положение тела и зависящие от искомых характеристик;-Xj - искомые характеристики: / масса, момент инерции, момент силы, масса состсчвных частей:
-коэффициент, характеризующий восстанавливающую силу;
-момент инерции устройства относительно осей вращения.
| Способ измерения масс и устройство для его осуществления | 1981 |
|
SU979874A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| .Гернет М.М., Ратобольский В.Ф | |||
| Определение моментов инерции | |||
| - М.: Машиностроение, 1969, с.28. | |||
