Изобретение относится к области устройств для измерений механических величин, в частности, к устройствам для измерения массы, координат центра масс (КЦМ) и моментов инерции натурных летательных аппаратов и их элементов.
Область применения - авиационная и космическая техника.
Измерение массово-инерционных характеристик натурных летательных аппаратов востребовано при разработке и испытаниях авиационной и космической техники. Под массово-инерционными характеристиками изделия понимаются: масса, КЦМ, осевые и центробежные моменты инерции, образующие в совокупности тензор инерции (ТИ). Знание данных параметров необходимо при формировании уравнений движения летательного аппарата для обеспечения оптимального управления его полетом.
Известны стенды-аналоги для измерения массово-инерционных характеристик изделий (патент на изобретение № 2368880, МПК G01M 1/10, 2008; патент на изобретение № 2434213, МПК G01M 1/10, 2010; патент на изобретение № 2506551, МПК G01M 1/10, 2012; патент на изобретение № 2562273, МПК G01M 1/10, 2013). Эти стенды имеют два режима работы - статический и динамический.
В статическом режиме измеряются масса и три КЦМ изделия. Масса измеряется после установки изделия на динамометрическую платформу, которая опирается на несколько датчиков весоизмерительных (ДВ) или на грузоприемную платформу, закрепленную на многокомпонентном динамометрическом элементе (ДЭ). Для определения КЦМ выполняются поочередно наклоны подвижных платформ Y и Z на ряд углов наклона. КЦМ определяются по измеренным ДВ или ДЭ силам и моментам сил, а также углам наклона грузоприемного стола стенда относительно осей Y и Z.
В динамическом режиме измеряется ТИ. При этом изделие, закрепленное на грузоприёмной платформе, совершает свободные затухающие колебания последовательно вокруг трех ортогональных осей стенда на подвижных платформах Х, Y и Z. Рамы связаны между собой через специальные стойки так, чтобы обеспечить последовательное раскачивание вокруг трех ортогональных осей устройства. При помощи закрепленной на нескольких ДВ динамометрической платформы или ДЭ измеряются три момента силы, по которым, используя данные установленных на осях вращения подвижных платформ Х, Y и Z датчиков угла поворота или расположенного под грузоприемной платформой трёхкомпонентного датчика углового ускорения (ТДУУ), известным массе и КЦМ определяются моменты инерции изделия.
К недостаткам подобных устройств относится повышенная погрешность измерения КЦМ и ТИ ввиду:
- в формулы расчета горизонтальных КЦМ в явном виде входят углы поворота грузоприемной платформы (патенты № 2368880, № 2434213, № 2506551, № 2562273);
- расчета углового ускорения подвижных платформ Х, Y и Z косвенным способом как второй производной угла поворота платформ Х, Y и Z, а также влияния жесткости конструкции стенда из-за расположения датчиков угла поворота подвижных платформ Х, Y и Z в соответствующих шарнирах, а угловое ускорение рассчитывается для объекта измерений, расположенного на грузоприемной платформе (патенты № 2368880, № 2434213, № 2506551);
- косвенного метода измерения сил (патенты № 2368880, № 2434213, № 2506551, № 2562273) и моментов сил (патенты № 2368880, № 2562273) на основании показания ДВ и их расположения друг относительно друга;
- необходимости поворота объекта измерений непосредственно на стенде (патент №2434213).
Наиболее близким к предложенному техническому решению является стенд для измерения стато-динамических характеристик физических объектов (патент на изобретение № 2562445, МПК G01M 1/10, 2013).
Стенд для измерения массово-инерционных характеристик изделия представляет собой измерительное устройство, содержащее ДВ, датчики угла поворота, датчики угла наклона, станину, динамометрическую платформу, устройство задания колебаний, состоящее из подвижных рам, соединённых между собой и со станиной шарнирами и системой пружин, соединенных с рамами, при этом оси шарниров соединены с осями датчиков угла, а также пятикомпонентным ДЭ (ПДЭ), на котором установлена грузоприемная платформа для объекта измерений.
Состав встроенных средств измерений прототипа сходен с патентуемым устройством за исключением отсутствия в прототипе ТДУУ. Угловое ускорение рассчитывается путем определения второй производной угла поворота подвижных платформ по времени.
Техническим результатом предлагаемого решения является повышение точности измерений ТИ за счет измерения моментов сил и углового ускорения прямым методом непосредственно на грузоприемной платформе стенда с помощью ПДЭ и ТДУУ, которые объединены в тензоизмеритель моментов инерции (ТМИ), закрепленный на нижней поверхности грузоприемной платформы.
Технический результат достигается тем, что стенд для измерения массово-инерционных характеристик изделия представляющий собой измерительное устройство, содержит датчики весоизмерительные, датчики угла поворота, станину, динамометрическую платформу, устройство задания колебаний, состоящее из подвижных рам, соединённых между собой и со станиной шарнирами и системой пружин, соединенных с рамами, при этом оси шарниров соединены с осями датчиков угла, грузоприемную платформу для объекта измерений. Стенд дополнительно оборудован тензоизмерителем моментов инерции, включающим в себя пятикомпонентный динамометрический элемент и три тензометрических датчика углового ускорения, расположенным непосредственно на грузоприемной платформе и закрепленным на нижней поверхности грузоприемной платформы, на которой установлено изделие.
Предлагаемое техническое решение иллюстрируется следующими фигурами.
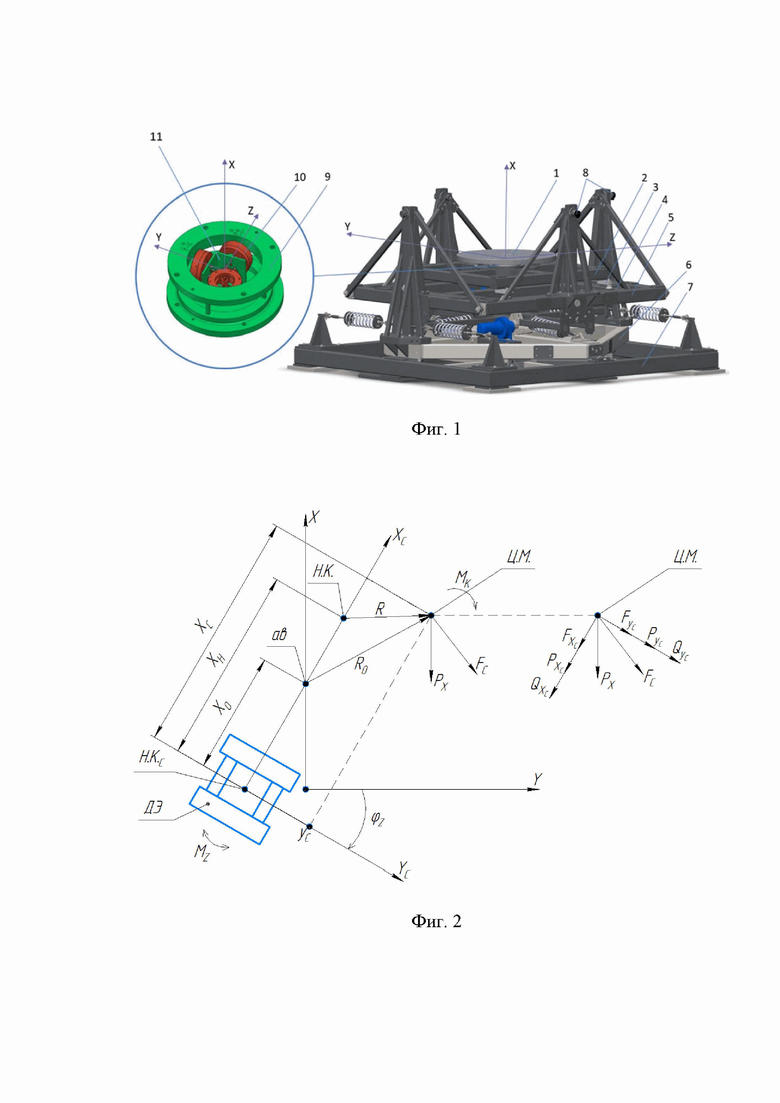
На фиг.1 представлен общий вид ТМИ на принципиальной схеме стенда.
На фиг. 2 представлена векторная диаграмма сил и моментов, действующих в центре масс (ЦМ) изделия.
Изделие через оснастку, не входящую в состав стенда, монтируется на грузоприемной платформе 1, установленной на верхнем основании ТМИ (представлен на местном виде в изометрии), который своим нижним основанием закреплен на динамометрической платформе 2, опирающейся на ДВ 3, установленных на подвижной платформе 4.
Подвижны платформы 4 и 5 обеспечивают повороты и наклоны изделия на грузоприемной платформе 1 относительно осей Z и Y. Поворотная платформа 6 обеспечивает повороты относительно оси X вышестоящих платформ и изделия. Вся конструкция стенда установлена на станине 7. Для измерения углового положения подвижных и поворотной платформы предусмотрены датчики угла 8. Таким образом, организованы три независимые колебательные системы, каждая из которых способна совершать колебания вокруг одной из ортогональных осей.
ТМИ состоит из ПДЭ 9 и ТДУУ 10, соединенных с помощью рамки 11 таким образом, что ТДУУ обеспечивает измерение по каждой из компонент углового ускорения (по осям X, Y и Z).
В статическом режиме измеряются масса изделия и три координаты центра масс изделия. Для измерения координат центра масс изделия задается ряд углов наклона платформ Y и Z. В формулах расчета горизонтальных координат центра масс изделия отсутствует угол поворота, они зависят от момента силы Мх и определенной ранее массы изделия. Вертикальная координата центра масс рассчитывается по измеренным ДВ массе, угловому положению подвижной платформы Y или Z и измеренному ТМИ моменту силы относительно подвижной оси (Мy или Мz соответственно).
Тензор инерции измеряется в динамическом режиме. При этом изделие, закрепленное грузоприёмной платформе, совершает свободные затухающие колебания последовательно вокруг трех ортогональных осей устройства, с помощью системы пространственных сварных рам (реализован принцип унифилярного подвеса). При определении тензора инерции используются измеренные в статическом режиме масса и КЦМ, а также показания ТМИ.
Для более подробного пояснения принципа и алгоритмов измерения на фиг. 2 приведена векторная диаграмма сил и моментов, действующих в центре масс (ЦМ) изделия, обладающего массой m, центральными моментами инерции Ix0, Iy0, Iz0 и тремя координатами центра масс хc уc, zc в подвижных осях О Xc Yc Zc.
Изделие под действием переменного по времени момента Мz совершает колебания вокруг оси вращения (ОВ), параллельной (в частности) оси Z неподвижной системы координат OXYZ.
Начало подвижной системы координат находится в центре ТМИ, а реальное начало координат НК, относительно которого измеряются моменты, перенесено вдоль оси Xс в точку с координатой xн.
Радиус-векторы R0 и R соединяют ОВ и НК с ЦМ изделия.
В ЦМ действует сила тяжести:
где: g - ускорение свободного падения.
Проекции силы Рх на подвижные оси О Xc Yc Zc образуют вектор:
Изменение количества движения при колебаниях массы m вокруг ОВ:
 (1)
(1)
где: Fc - вектор динамической силы, действующий в ЦМ;
Vc - вектор скорости ЦМ:
 ;
;
 - вектор угловой скорости с компонентами:
- вектор угловой скорости с компонентами:
 .
.
В результате в ЦМ действует вектор обобщенной силы:
 (2)
(2)
с компонентами:
Изменение момента количества движения при колебаниях изделия вокруг ЦМ:
 (3)
(3)
где: Мк - динамический момент;
К - момент количества движения:
 ;
;
Т - тензор инерции:
 ;
;
Ix; Iy; Iz - осевые, а  ;
;  ;
;  - центробежные моменты инерции.
- центробежные моменты инерции.
Момент силы Qc относительно начала координат:
 (4)
(4)
С учетом (3) вектор обобщенного момента, действующего относительно НК:
Компоненты вектора момента при колебаниях изделия вокруг осей Х, Y, Z
• Колебания вокруг оси Х
Вектор скорости центра масс:
 (5)
(5)
Компоненты вектора скорости:

Компоненты вектора инерционной силы:
 (6)
(6)
Компоненты вектора момента относительно начала координат:
 (7)
(7)
Откуда:
 (8)
(8)
С учетом (3)

Верхние индексы моментов указывают оси, вокруг которых колеблется изделие, а первые нижние индексы обозначают оси, вдоль которых измеряются составляющие моментов и сил.
Вторые нижние индексы указывают, что измерения производятся в подвижных осях О Хс Yc Zc.
• Колебания вокруг оси Y
В данном случае в центре масс действует вектор обобщенной силы Qc с компонентами:
Компоненты вектора момента:
 (9)
(9)
 (10)
(10)
где:  - компоненты вектора
- компоненты вектора  .
.

• Колебания вокруг оси Z
Компоненты вектора Qc:
Компоненты вектора момента:
 (11)
(11)
Откуда компоненты вектора  :
:
 (12)
(12)
где:  - компоненты вектора
- компоненты вектора  .
.

В статическом режиме изделию последовательно задается набор дискретных углов поворота и по измеренным: углам, моментам и известной силе тяжести изделия определяются координаты центра масс.
Положим в уравнениях (10) и (12)  .
.
Тогда, используя повороты изделия вокруг осей Y и Z, получим следующие уравнения измерения.
Поворот вокруг Y:
 (13)
(13)
Поворот вокруг Z:
 (14)
(14)
В результате имеем четыре уравнения для определения трех координат (разность  определяется дважды), которые решаются методом наименьших квадратов.
определяется дважды), которые решаются методом наименьших квадратов.
Первые члены уравнений с нулевыми нижними индексами учитывают начальные разбалансы мостов.
Легко видеть, что углы поворота в явном виде не входят в уравнения измерения (13) и (14), их изменение приводит к изменению проекций сил, которые, наряду с моментами, измеряются ТМИ.
Указанное обстоятельство является важным преимуществом данного метода измерения координат центра масс, по сравнению с известным методом.
Таким образом повышается точность измерений ТИ за счет измерения моментов сил и углового ускорения прямым методом непосредственно на грузоприемной платформе стенда с помощью ПДЭ и ТДУУ, которые объединены в тензоизмеритель моментов инерции (ТМИ), закрепленный на нижней поверхности грузоприемной платформы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРОВ МАСС И МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЙ | 2022 |
|
RU2797387C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЯ | 2012 |
|
RU2506551C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ СТАТО - ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ФИЗИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2562445C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2008 |
|
RU2368880C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССО-ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК ИЗДЕЛИЯ | 2013 |
|
RU2562273C2 |
| Комплекс для определения инерционных характеристик с измерительной системой | 2017 |
|
RU2683800C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ И КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЙ | 2013 |
|
RU2525629C1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ И КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2012 |
|
RU2593644C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2596032C2 |
Изобретение относится к области измерительной техники и может быть использовано для измерения массы, координат центра масс и моментов инерции натурных летательных аппаратов и их элементов. Устройство содержит датчики весоизмерительные, датчики угла поворота, станину, динамометрическую платформу, устройство задания колебаний, состоящее из подвижных рам, соединенных между собой и со станиной шарнирами и системой пружин, соединенных с рамами, при этом оси шарниров соединены с осями датчиков угла, грузоприемную платформу для объекта измерений. Устройство также оборудовано тензоизмерителем моментов инерции, включающим в себя пятикомпонентный динамометрический элемент и три тензометрических датчика углового ускорения, расположенным непосредственно на грузоприемной платформе и закрепленным на нижней поверхности грузоприемной платформы, на которой установлено изделие. 2 ил. 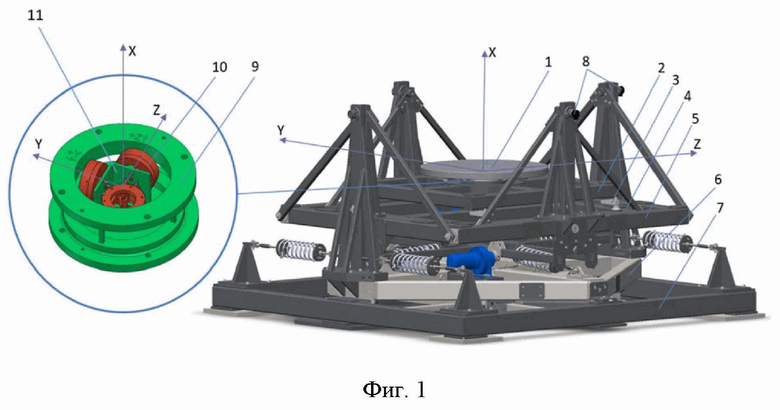
Стенд для измерения массово-инерционных характеристик изделия, представляющий собой измерительное устройство, содержащее датчики весоизмерительные, датчики угла поворота, станину, динамометрическую платформу, устройство задания колебаний, состоящее из подвижных рам, соединенных между собой и со станиной шарнирами и системой пружин, соединенных с рамами, при этом оси шарниров соединены с осями датчиков угла, грузоприемную платформу для объекта измерений, отличающийся тем, что стенд дополнительно оборудован тензоизмерителем моментов инерции, включающим в себя пятикомпонентный динамометрический элемент и три тензометрических датчика углового ускорения, расположенным непосредственно на грузоприемной платформе и закрепленным на нижней поверхности грузоприемной платформы, на которой установлено изделие.
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ СТАТО - ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ФИЗИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2562445C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССО-ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК ИЗДЕЛИЯ | 2013 |
|
RU2562273C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЯ | 2012 |
|
RU2506551C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2008 |
|
RU2368880C1 |
| US 7278295 B2, 09.10.2007. | |||

