Изобретение отасхзится к устройствам управления и контроля работы различных электромагаитных механизмов, являющих ся молотками, компрессорами, приводам клапанов, вентилей, заавижек и т.п., которые нахоцят широкое применение в различных отраслях промышленности. Он преоназначено для управления электрома нитными механизмами и измерения скорости и перемещения якоря электромагнитного механизма и, следовательно, мо жет быть использовано в системах регулирования этих величин указанЙых механизмов. Известно устройство контроля положения нкоря и управления электромагнит ным механизмом, в котором на крайних полюсах электромагнитного механизма устанавливают дополнительные измерительные катушки-датчики, на которые подают питание. В полости рабочих катушек-механизма при поочередном их включении перемещается якорь. В момент 1шцхода намагниченного торца якор к полюсу под действием электромагнит ньк сил катушки в катушке-датчике наводится сигнал, пропорциональный скорости цвижения якоря. Этот сигнал используется для переключения рабочих катушек электромагнитного механизма, после чего 5гкорь начинает двигаться в противоположном направлении С Однако конструкция электромагнитног механизма усложняется за счет использования дополнительных катушек. Кроме того, информация о положении якоря поступает только в дискретные моменты, что не позволяет регистрировать весь процесс движения, и затрудняет автомат ческое регулирование работы электромаг нитного механизма, снижает его функци ональные возможности. Наиболее близким к предлагаемому является устройство контроля положения якоря электромагнитного механизма, содержащее силовую и управляющую части. Силовая часть включает рабочие катушки силовых электромагнитов и перемещающийся возвратно-поступательный якорь. Управляющая часть устройства содержит вспомогательный источник импульсов, ключи, полупроводниковый элемент и датчик тока в виде шунта на резисторе. Устройство, предназначенное для контроля положения якоря в процесс работы механизма, работает следующим образом. 1В рабочие катушки подают питающие импульсы тока, соадакяцие им- пульсы электромагнитных сил, под дейстгеием которых перемешается якорь. Для контроля положения якоря во время отсутствия в катушке питакмцих импульсе тока в нее подают импульсы от дополнительного источника высокочастотных сигналов и контролируют токи высокой частоты в этой катушке, амплитуды которых обратно пропорционалы1ы индуктивности катушки, меняющейся при перемещении якоря С 2 3 . Применение высокочастотных импульсов обусловлено необходимостью разделения токов силовой цепи и измерительных сиг- налов. Такое решение требует дополнительного высокочастотного источника, что усложняет устройство. Кроме того, при этом производится дополнительный нагрев обмоточного провода и магнитопровода катушки токами высокой частоты, что снижает энергетические параметры электромагнитного механизма. Цель изобретения - повьшение эффективности управления. Указанная цель достигается тем, что в устройство для управления движением электромагнитного механизма, содержащее вьшоды для подключения;, обмотки прямого хода и выводы для подключения обмотки обратного хода электромагнитного механизма, два датчика тока, два ключевых элемента, тиристоры, пороговый элемент, блок управления и выводы для подключения источника питания, причем выводы для подключения обмотки прямого хода включены последовательно с одним из датчиков тока, выводы для подключения обмотки обратного хода включены последовательно с другим датчиком ка, каждая из последовательных плит через тиристоры соединены с вьюодами для подключения источника питания, управля- кнцие электроды тиристоров соединены с выходами блока управления, один из . входов каждого ключевого элемента сое- динен с одним из выводов для подключения обмотки прямого или обмотки обратного хода, введены элемент ИЛИ, усилитель с памятью и интегратор, причем другой вход каждого ключевого элемента соединен соответственно с выходами одного и другого датчиков тока, выходы ключевых элементов соединены с входами элемента ИЛИ, выход которого подключен к входу усилителя с памятью, соединенного своим выходом с входом интегратора, выход интегратора подключен к входу порогового элемента, выходы которого соединены с вхоаами блока управления. Предлагаемое устройство позволяет осуществить непрерывное слежение за скоростью и перемещением якоря и управ лять работой электромагнитного механиэ ма, что дает возможность создания гибких систем автоматического регулировакия механизмов, а следовательно, нагрев катушек и магнитопровода электромагнитного механизма высокочастотны ми импульсами тока, что повышает КПД электромагнитного механизма, и упрощается конструкция самого электромагнитнохх) механизма за счет исключе- 1НИЯ индуктивных датчиков положения ЯКО ря. На фиг. 1 представлена схема устрой ства контроля параметров и управления движением электромагнитного механизма; на фиг. 2 - диаграммы его работы. Устройство содержит блок 1 управления, включающий в себя источник пита ния, рабочие катушки электромагнитного механизма обратного хода 2 и прямого хода 3. Полупроводнико рые управляемые элементы, например тиристоры 4-7 включаются короткими импульсами, сфор мированными в блоке 1 управления, а включаются в момент спада тока катуше до нуля при гашении поля катушек. Посл выключения пар тиристоров 4-5 и 6-7 катушки 2 и 3 соответственно отключаются от блока 1 управления. Датчики 8и 9 токов в цепях катушек 2 и 3 включают токовые шунты 10 и 11, оптроны 12 и 13, усилители 14 и 15. Логические ключи 16 и 17 имеют по два входа, причем один вход у каждого запрещающий. Запрещающие входы ключе 16 и 17 соединены с датчиками тока, соответственно 8 и 9, другие входы клю чей подключены к катушкам. Выходы ло- гических ключей через схему ИЛИ 18 присоединены к усилителю 19с памятью который в свою очередь связан через интегратор 20 с пороговым устройст вом 21. Для описания работы устройства примем, что рабочая часть якоря - часть якоря, находящаяся в данный момент в зоне включенной катушки, нерабочая часть якоря - остальная часть якоря. Нерабочая часть якоря находится в зоне обесточений катушки электромагнитного механизма. Работа устройства основана на известном явлении электромагнитной индукции, а именно намагниченное ферромагнитное тело (им является нерабочая часть якоря), перемещаясь в обесточенной катушке электромагнитного механиэМа, наводит в ней ЭДС, пропорциональную скорости движения якоря. Приведенная схема предназначена для контроля параметров и управления Двухкатушечного электромагнитного механизма. Рассмотрим его работу на примере электромагнитного молотка. Пусть в на чальный момент времени якорь (не показан) после нанесения удара по инструменту движется вверх под действием электромагнитных сип катушки 2 обратного хода. По катушке 2 обратного хода протекает ток i (фиг. 2б), поэтому на выходе датчика 8 тока есть напряжение, пропорциональное току, которое подается на запрещающий вход логического ключа 16, следовательно, напряже , ние катушки 2 не проходит через логический ключ, на выходе ключа 16 напряжение отсутствует. По катушке 3 прямого хода ток не протекает, следовательно, тиристоры 6 и 7 разомкнуты и отсоединяют катушку от блока 1 управления. На выходе дат чика 9 тока напряжение равно нулю, а значит отсутствует запрещающий сигнал на входе ключа 17. Движущейся намагниченной нерабочей частью якоря в катушке электромагнитного двигателя 3 наводится . -пх- Р°порциональная скорости его движения. Проходя через логический ключ 17 и схему ИЛИ 18, эта ЭДС через усилитель 19 с памятью поступает на измерительной схемы как сигнал, пропорциональный скорости цвижения якоря и у (фиг. 2б). Интегрируя напряжение U в блоке 20, получаем сигнал, пропорциональный ходу якоря и г (фиг, 2 ). Когда напряжение и, буает равно некоторой величине, заранее установленной и определяющей наибольшее перемещение якоря под действием электромагнитных сил катушек в блоке 21, вырабатывается сигнал U (фиг. 2 ), поступающий на вход блока 1 управления. По этому сигналу производится включение катушки 3 прямого хода тиристорами 6 и 7 и выключение катуш- ки 2 обратного хода. Теперь на катушку 3 подается напряжение с блока 1 управления. Якорь тормозится и движется вниз под действием электромагнитных сил ватушки прямо го хода. По катушке 3 протб1(ает ток 1 (фиг. 2$), поэтому с датчика 9 на вход логического ключа 17 запретом поступа- ет напряжение, пропорциональное току, слеаова1ельно, выходное напряжение блок питания не проходит на выход логического ключа 17, а значит и на вькоа измерительной схемы через блок ИЛИ 18. Через блок-чжему питания, входящую блок 1 управления, происходит гашение магнитного поля катушки 2 обратного хода. После того, как ток в катушке 2 спа- дает до нуля, снимается запрет с логического ключа 16, а тиристоры 4 и 5 отдслючают катушку от блока 1 питания. Намагниченная часть якоря, перемешаясь в катушке 2 обратного хода, наводит в ней ЭДСЕр,, пропорциональную скорости его движения. Проходя через ключ 16 логический и схему ИЛИ 18, эта ЭДС через усилитель 19 поступает на выход измерительной системы, как сигнал, пропорциональный скорюсти движения бойка и(фиг. 26), Интегрируя сигнал и в блоке 20, получаем напряжение, пропорциональное ходу якоря Ur (фиг. 21). Когда напряжение Uf- будет равйо заранее заданной величине, определяющей положение якоря в момент удара, в блоке 21 вырабатывается сигнал Оц(фиг. 2 поступающий на вход блока 1 управле- кия. По этому сигналу производится вклк чение катушки 2 обратного хода тиристорами 4 и 5 и выключение катушки 3 прямого хода. На катушку обратного хода теперь подается напряжение. Якорь наносит удар по инструменту и движется вверх под действием электромагнитных сил катуш- ки 2 обратного хода. По катушке 2 протекает ток 3 QJ (фиг. а5), поэтому с датчика 8 тока на вход логического ключа 16 запретом поступает напряжение, пропорциональное току, следовательно, выходное напряжени блока питания не проходит на выход клк ча 16, а значит - на вь1ход измерительной схемы через блок ИЛИ 18. Через схему блока питания происходит гашение магнитного поля катушки 3 прямого хода. После того, как ток в катушке прямого хода спадает до нуля, сн мается запрет с логического ключа 17, а тиристоры 6 и 7 отключают катушку 3 10 806 от блока питания. Намагниченная нерабо чая часть якоря, перемешаясь в катуш ке 3 прямого хода, наводит в ней Э/Ю Ерк пропорциональную скорости его движения. Проходя через логический ключ и схему ИЛИ 18, эта ЭДС поступает на выход изме{ 1телЕШой системы как сигнал, пропортхиональный скорости движения бойка, цикл повторяется (фиг. 20). В ннтервапах времени tppy, гпх происходит коммутация токов катушек. За время t.Q происходит гашение поля катушки обратного хода, а за время i - прямого хода. В эти интервалы времени протекают токи в обеих катушках, поэтому на запрещающие входы обоих логических ключей поступав т напряжение с датчиков тока. Логические ключи 16 и 17 закрыты. На выходе схемы ИЛИ 18, т.е. на входе усилителя 19 с памятью отсутствует напряжение. Длительность интервалов составляет 3-5% времени цикла. За это время скорость движения якоря практически не изменяется, поскольку электромагнитные силы катушек во время коммутационных процессов малы. Поэтому на указанных интервалах времени , t го у выходе усилителя 19 с памятью сохраняется постоянное напряжение, соответствующее значению скорости якоря перед началом коммутации (фиг. 2в). Интегрируя полученный сигнал О у получаем напряжение, пропорциональное перемещению якоря иг(фиг. 2т-). В предлагаемом устройстве контроля и управления электромагнитного молотка отсутствуют дополнительные элементы, устанавливаемые в электромагнитном молотке. Датчиками являются сами обесточенные рабочие катушки. Тем самым упрошается конструкция электромагнитного механизма. При этом по сравнению с прототипом отсутствуют дополнительнью потери от высокочастотных импульсов, за счет чего обеспечивается повьпиение КПД механизма. Предлагаемое устройство контроля и управления может быть использовано в любом электромагнитном механизме, содержащем не менее двух катушек, работающих не одновременно. Его использование позволит создавать системы регулирования и управления электромагнитным приводом повышенной точности, например при создании электромагнитных штампов, процессов, вибровозбудителей и т.д.
-380djffrtf
Q3vf.f
J.
1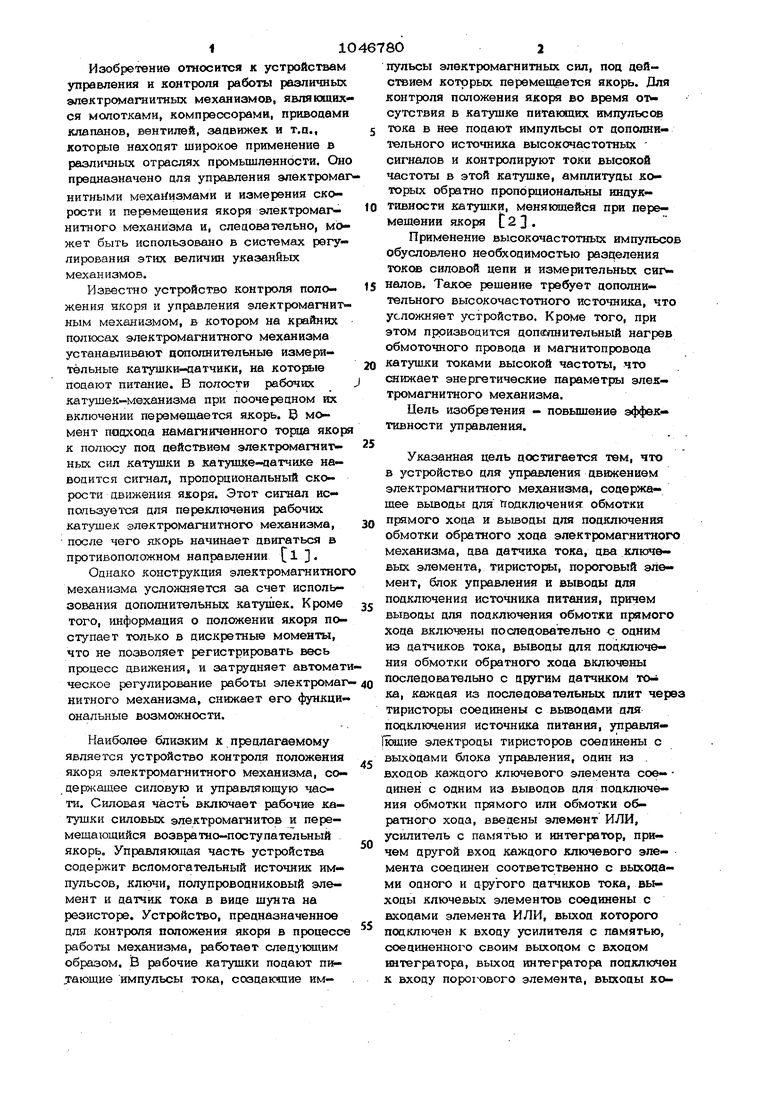

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1990 |
|
SU1830611A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 1989 |
|
SU1731018A1 |
| ЭЛЕКТРОПРИВОД УДАРНОГО ДЕЙСТВИЯ | 1992 |
|
RU2017319C1 |
| ИНДУКТОРНЫЙ ГЕНЕРАТОР С СОВМЕЩЕННЫМИ ОБМОТКАМИ ВОЗБУЖДЕНИЯ И СТАТОРА | 2019 |
|
RU2702615C1 |
| Электропривод | 1990 |
|
SU1810979A1 |
| Устройство для управления электромагнитом | 1989 |
|
SU1617472A1 |
| СИСТЕМА ПИТАНИЯ И УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОЛОТОМ ДВОЙНОГО ДЕЙСТВИЯ, ВХОДЯЩИМ В СОСТАВ ВИБРОИСТОЧНИКА | 2023 |
|
RU2823122C1 |
| Устройство для управления двухфазным электромеханическим преобразователем | 1974 |
|
SU647829A1 |
| Электропривод транспортного средства | 1986 |
|
SU1359171A1 |
| Нереверсивная электрическая машина с вентильно-механическим коммутатором | 1989 |
|
SU1791904A1 |

УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОМАГНИТНОЮ. МЕХАНИЗМА, соцержашее выводы для поцключения обмотки прямого хода и выводы для подключения обмотки обратного хода электромагнитного механизма, два датчика тока, два ключевых элемента, тиристоры, пороговый элемент, блок управления и выводы для подключения источника питания, причем выводы для подключения обмотки прямого хода включены последовательно с одним из датчиков тока, выводы для подключения обмотки обратного хода включены последовательно с другим датчиком тока, каждая из ука эанных последовательных цепей через тиристоры соединена с выводами для подклю чения источника питания, управляющие электроды тиристоров соединены с выходами блока управления, один из вхо дов каждого ключевого элемента соединен с одним из выводов для подключения обмотки прямого или обмотки обратного хода, отличающееся тем, что, с целью повышения эффектявностн упрев ления, в устрсЛство введены элемент ИЛИ, усилитель с памятью и интегратор, причем другой вход каждого ключевого элеI мента соединен соответственно с выходами одного и другого датчиков тока, выхо(Л ды ключевых элементов соединены с входами элемента ИЛИ, выход которого подключен к входу усилителя с памятью, соединенного своим выходом с входом интегратора, выход интегратора подключен к входу порогового элемента, выходы которого соединены с входами блока 4 управления. О5 00
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Передвижной прибор для съемки плана и профиля пути | 1926 |
|
SU4974A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ контроля положения якоря в электромагнитных механизмах | 1974 |
|
SU516020A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
