Изобретение относится к управлению электрическими машинами возвратно-поступательного действия и может быть использовано для управления электромагнитными молотами, бутобоями, насосами и т.д.
Известно устройство управления электромагнитным молотом, содержащее катушки прямого и обратного хода, внутри которых перемещается боек, коммутирующий конденсатор, тиристорные ключи, индукционные датчики положения бойка, установленные на внешних концах катушек и подключенные к управляющим электродам тиристоров, связывающих катушки молота с источником постоянного тока.
Известно устройство для управления движением электромагнитного механизма, обеспечивающее переключение катушек прямого и обратного хода путем измерения наводимой намагниченным концом якоря в обесточенной катушке ЭДС и управления этой ЭДС как сигналом, пропорциональным скорости движения якоря, через интегратор и пороговое устройство.
Наиболее близким по технической сущности и достигаемому результату является электромагнитный привод, содержащий электромагнитный двигатель возвратно-поступательного движения с якорем, имеющим профилированную проточку и устройство управления с двумя компараторами, потенциометрическим задатчиком частоты, RS-триггером, элементом 2И и трансформаторным датчиком положения якоря.
Недостатком такого решения является неработоспособность при горизонтальном расположении двигателя, что существенно сужает область применения электропривода.
Цель изобретения расширение эксплуатационных возможностей путем обеспечения работоспособности привода при любом расположении двигателя.
Поставленная цель достигается тем, что на боковой поверхности якоря выполняется вторая цилиндрическая кольцевая проточка, отстоящая от первой на длину рабочего хода, а в блок управления введены Т-триггер, второй и третий RS-триггеры, второй и третий элементы 2И; элемент 2И-НЕ, кнопки "Пуск" и "Стоп", которые подключены к входам второго RS-триггера, а выход датчика подключен к счетному входу Т-триггера, прямой выход которого подключен к первому выходу первого элемента 2И, а инверсный выход Т-триггера подключен к S-входу первого RS-триггера и первым входам второго элемента 2И и элемента 2И-НЕ, вторые входы этих элементов и R-вход Т-триггера подключены к прямому выходу второго RS-триггера, выход элемента 2И-НЕ связан с S-входом третьего RS-триггера, выходы первого и второго элементов 2И подключены к R-входам первого и третьего RS-триггера, прямые выходы которых связаны с управляющими входами источника питания обмоток прямого и обратного хода соответственно.
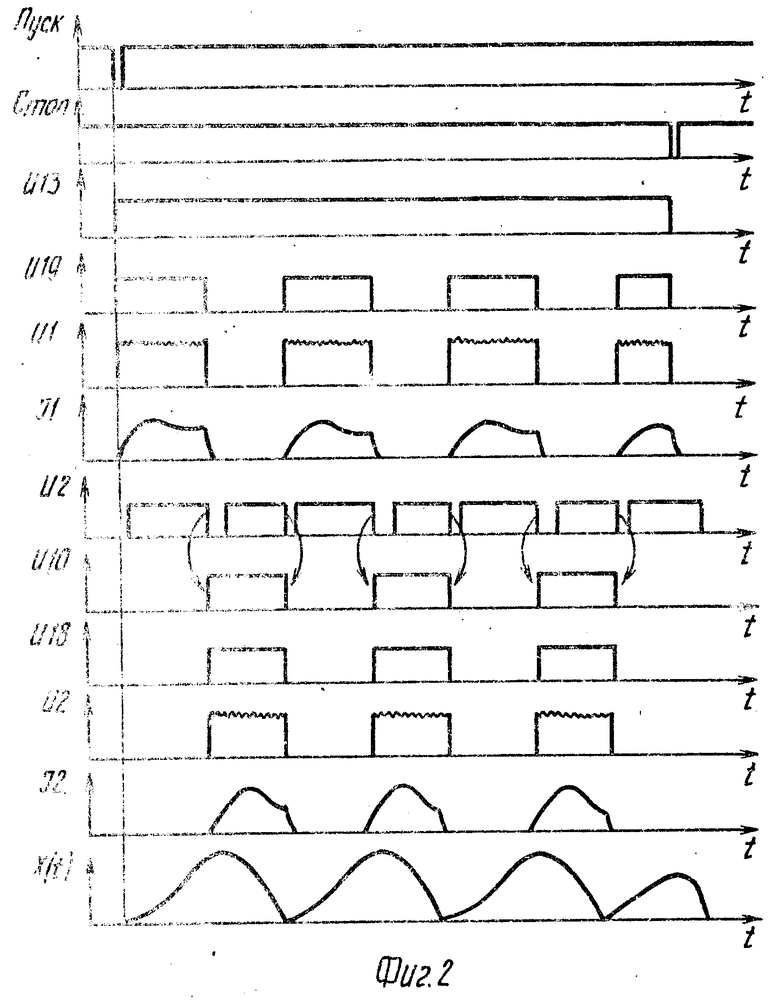
На фиг.1 показан предлагаемый электромагнитный привод с частичным разрезом электромагнитного двигателя по якорю; на фиг.2 диаграмма работы электромагнитного привода.
Привод содержит линейный электромагнитный двигатель, включающий две соосные обмотки обратного хода 1 и прямого хода 2, заключенные в отдельные ферромагнитные корпуса 3 и 4. Внутри обмоток 1 и 2 по диамагнитной направляющей 5 перемещается ферромагнитный якорь 6, имеющий первую 7 и вторую 8 кольцевые цилиндрические проточки, расстояние между которыми равно l-длине хода якоря, т. е. расстоянию от верхнего торца якоря 6 до верхнего торца обмотки 1.
Между обмотками 1 и 2, напротив первой кольцевой проточки 7, в направляющей 5 имеется окно, в котором расположен бесконтактный датчик 9 положения якоря типа КВП-8, реагирующий на наличие металла в зоне чувствительности. На выходе датчика появляется сигнал логической "1" в момент появления в зоне чувствительности датчика металла, в противном случае на выходе "0". Выход датчика 9 связан с счетным входом Т-триггера 10 в устройстве 11 управления, которое содержит три RS-триггера 12-14, два элемента 2И 15 и 16 и элемент 2И-НЕ 17. Прямой выход Т-триггера 10 соединен с первым входом элемента 2И 15, а инверсный выход подключен к первым входам элементов 2И 16, 2И-НЕ 17 и S-входу RS-триггера 12. Вторые входы элементов 15-17 и R-вход Т-триггера 10 связаны с прямым выходом RS-триггера 13, S и R-входы которого через кнопки "Пуск" и "Стоп" подключены к "земле". Выход элемента 17 связан с S-входом RS-триггера 14, R-вход которого подключен к выходу элемента 16, а выход элемента 15 подключен к R-входу RS-триггера 12. Прямые выходы RS-триггеров 12 и 14 подключены соответственно к управляющим входам 18 и 19 систем 20 и 21 управления тиристорными выпрямителями 20 и 23 источника 24 питания обмоток 2 и 1. Выпрямители 22 и 23 собраны по схеме Ларионова, а их системы 20 и 21 управления построены по вертикальному способу изменения фазы управляющего импульса. Устройство управления может быть реализовано на цифровых интегральных микросхемах любой серии (К155, К555, К561 и т.д.).
Предлагаемый привод работает следующим образом.
Пусть в начальный момент времени все триггеры 10, 12, 13 и 14 установлены в "0", а первая кольцевая проточка 7 на якоре 6 находится напротив чувствительной зоны датчика 9 и тогда на его выходе сигнал логического "0" (Uд). При нажатии кнопки "Пуск" происходит установка RS-триггера 13 в состояние "1" (U13), что приводит к смене сигнала на выходе элемента 17 из "1" в "0" и установке триггера 14 в "1". Появление "1" на прямом выходе RS-триггера 14 возбуждает управляющий вход 19 (см. U19) системы 21 управления и разрешает подачу импульсов управления к тиристорному преобразователю 23 источника 24 питания. На выходе источника 24, подключенном к обмотке 1, появляется напряжение U1, по обмотке течет ток I1. Под действием электромагнитной силы якорь 6 начинает движение (кривая x(t)) и первая кольцевая проточка 7 уходит из чувствительной зоны датчика 9 и на его выходе появляется сигнал логической "1", которая не вызывает изменения состояния элементов в устройстве 11. При подходе рабочего торца якоря 6 к торцу обмотки 1 вторая кольцевая проточка 8 на якоре 6 входит в зону чувствительности датчика 9 и на его выходе происходит смена сигналов из "1" в "0", что приводит к изменению сигналов на выходе Т-триггера 10. Появление "0" на инверсном выходе триггера 10 приводит к изменению сигналов на выходах элементов 16 и 17 и RS-триггера 14. На управляющем входе 19 появляется "0", система 21 управления прекращает подачу импульсов к выпрямителю 23, обмотка 1 обеспечивается, а якорь 6 останавливается. В то же время нулевым уровнем с инверсного выхода Т-триггера 10 перебрасывается RS-триггер 12 и на его прямом выходе появляется "1", которая возбуждает управляющий вход 18 системы 20 управления и разрешает ей подачу импульсов управления к тиристорному выпрямителю 22 источника 24 питания. На выходе источника, подключенном к обмотке 2, появляется напряжение U2, по обмотке 2 течет ток I2, создавая электромагнитную силу тяги, и якорь начинает движение в обратном направлении.
При этом вторая кольцевая проточка 8 уходит из зоны чувствительности датчика 9 и на его выходе появляется сигнал "1", который вызывает изменения состояний элементов в устройстве 11 управления. При входе первой кольцевой проточки 7 в зону чувствительности датчика 9 на выходе последнего появляется "0", который вызывает изменение состояния триггера 10. На его прямом выходе появляется "0", который через элемент 15 сбрасывает RS-триггер 12 в "0", т. е. на управляющем входе 18 системы 20 управления появляется "0". Подача импульсов управления к выпрямителю 22 прекращается, обмотка 2 обесточивается. В то же время появление "1" на инверсном выходе Т-триггера 10 приводит к переброске триггера 14, и на его прямом выходе устанавливается "1", а появление "1" на управляющем входе 19 системы 21 разрешает работу выпрямителя 23. На выходе выпрямителя появляется напряжение U1, а по обмотке 1 течет ток I1, создавая силу тяги и меняя направление движения якоря. Цикл повторяется. Остановка электропривода производится нажатием кнопки "Стоп", при этом RS-триггер 13 устанавливается в "0" и через элементы 15 и 16 устанавливает триггеры 12 и 14 в "0". При этом производится сброс и Т-триггера 10. На управляющих входах 18 и 19 "0" и подача импульсов управления от систем 20 и 21 к выпрямителям 22 и 23 прекращается, напряжение с их выходов снимается и двигатель останавливается.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД УДАРНОГО ДЕЙСТВИЯ | 1992 |
|
RU2017319C1 |
| Электромагнитный привод ударного действия | 1990 |
|
SU1745920A1 |
| Электропривод | 1990 |
|
SU1830611A1 |
| Многодвигательный электропривод переменного тока | 1985 |
|
SU1307521A1 |
| Электромагнитный привод | 1983 |
|
SU1086539A1 |
| Вентильный электропривод | 1986 |
|
SU1319221A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ДВИГАТЕЛЕМ (ВАРИАНТЫ) | 1997 |
|
RU2143761C1 |
| Вентильный электродвигатель | 1984 |
|
SU1325632A1 |
| Устройство для управления @ - фазным шаговым двигателем | 1984 |
|
SU1265964A1 |
| СИСТЕМА ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2024 |
|
RU2822126C1 |
Использование: изобретение может быть использовано для управления электромагнитными молотами и насосами. Сущность изобретения: привод содержит якорь 6 с проточками 7 и 8, отстоящими на длину рабочего хода, датчик 9 положения, обмотки 1 и 2, источник 24 питания и блок 11 управления, включающийся три RS триггера 12 14. Т триггер 10, два элемента 2И 13 17 14 24, 13 15 12, 10 16 14. Две проточки 7 и 8 с одним датчиком 9 обеспечивают фиксированный диапазон перемещения и работу привода в любом положении. 2 ил.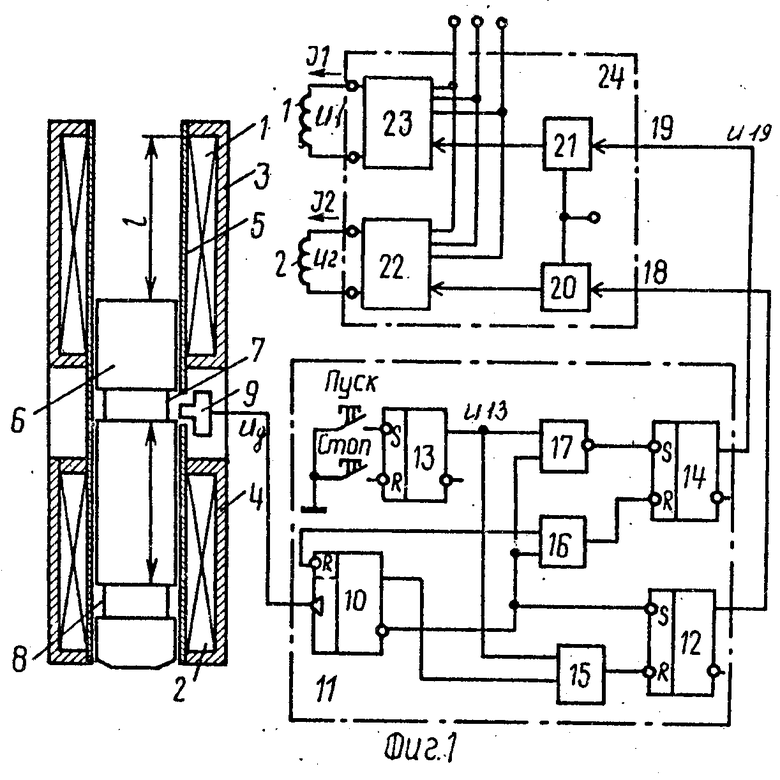
ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД, содержащий двигатель с обмотками прямого и обратного хода, размещенными на диамагнитной направляющей, внутри которой расположен якорь с кольцевой цилиндрической проточкой на боковой поверхности, между обмотками в окне направляющей расположен датчик положения якоря, подключенный к входу блока управления, содержащего RS-триггера, элемент 2И, а выход блока управления подключен к управляющим входам источника питания, обмоток, отличающийся тем, что, с целью расширения эксплуатационных возможностей путем обеспечения работоспособности при любом расположении двигателя, на боковой поверхности якоря выполнена вторая цилиндрическая кольцевая проточка, отстоящая от первой на длину рабочего хода, а в блок управления введены Т-триггер, второй и третий RS-триггеры, второй элемент 2И, элемент 2И-НЕ, кнопки "Пуск" и "Стоп", подключенные к входам второго RS-триггера, выход датчика подключен к счетному входу Т-триггера, прямой выход которого подключен к первому входу первого элемента 2И, а инверсный выход Т-триггера подключен к S-входу первого RS-триггера и первым входам второго элемента 2И и элемента 2И-НЕ, вторые входы этих элементов и R-вход Т-триггера подключены к прямому выходу второго RS-триггера, выход элемента 2И НЕ связан с S -входом третьего RS-триггера, а выходы первого и второго элементов 2И подключены к R-входам первого и третьего RS-триггеров, прямые выходы которых связаны с управляющими входами источника питания обмоток прямого и обратного хода соответственно.
| Электромагнитный привод | 1983 |
|
SU1086539A1 |
