4 VJ
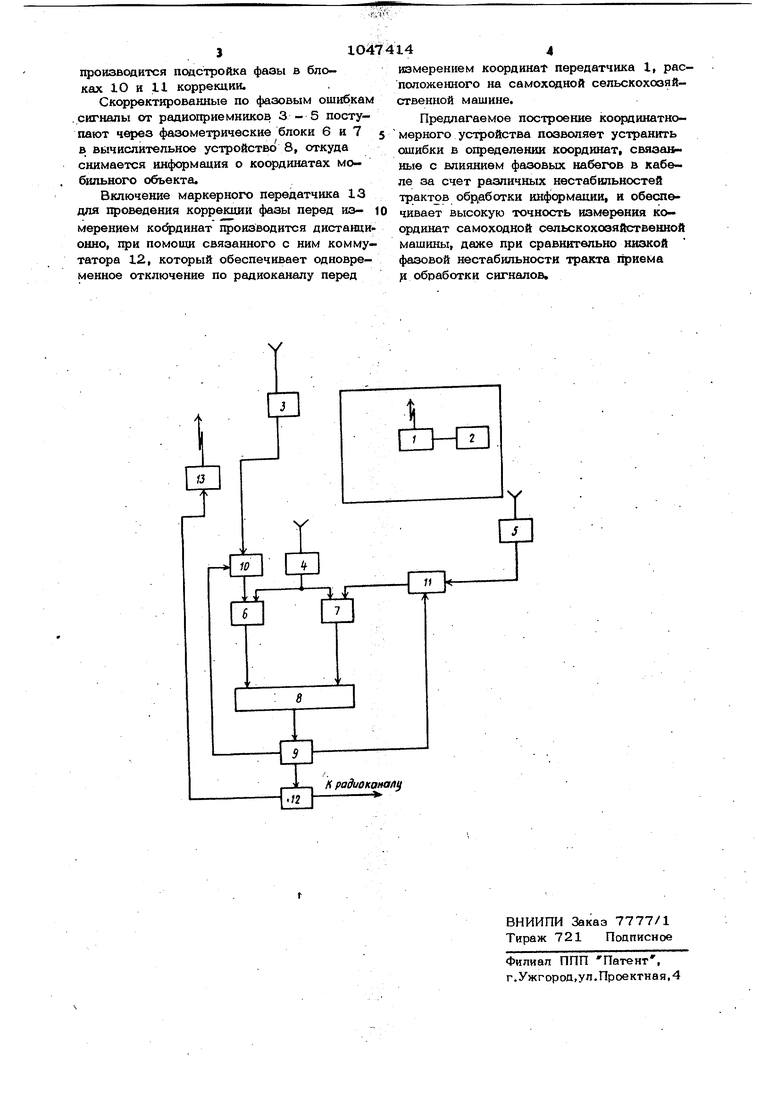
4; Изобретение относится к системам автоматического направления движения самоходных сельскохозяйственных машин. По основному авт. св. № 770444 известна фазовая разностно-пшерболическая координатно-мерная система ,содержащая передатчик с,блоком формирования модупирующих частот грубого и точного отсче тов, расположенные на самоходной сельскохозяйственной машине, приемники, установленные по углам поля и соединаш ые кабедем с фазометрическими блоками, выходные сигналы которых связаны с вычислительным устройством C-LJ . Недостатком данной системы, снижающим точность измерения координат самоходных сельскохозяйственных машин, является неучтеииый схемным решением набег фазы сигналов, поступающих от приемных устройств по кабелям на фазометрические блоки, вследствие изменения электрических параметров кабелей, разо грева приемной аппаратуры и других дестабдпизирующих факторов, цель изобретения - повышение точности измерения координат самоходных сельскохозяйственных машин за счет коррек- щш про11звольно-1сзмёняющейся во времени с|)азы. Поставленная цель достигается тем, что фазовая разностно-гиперболическая координатно-мерная система для автоматического вождения сельскохозяйственных машин, дополнительно содержит блок обнаружения фазовых ошибок, регулируемые блоки коррекции фаз, коммутатор и маркер ный передатчик, при этом регулируемые блоки коррекции фаз включены в разрывы кабелей, соединяющих фазометрические блоки с пр)емниками, расположенными по хлам поля, и соединены с первым и вторым выходами блока обнаружения фазовых сшибок, третий вьсход которого соединен с коммутатором, подключенным одним выходом непосредственно к маркерному пере датчику, е другим - по радиоканалу к передатчику самоходной сельскохозяйствен1ЮЙ машины, причем вход блока обнаружеШ1Я фазовых ошибок соединен с выходом вычислительного устройства. На чертеже изображена функциональная .cxeNfa системы. Фазовая разностно-гиперболическая коордшштно-мерная система для автоматического вождения самоходных сельскохозяйство шьис маш1ш содержит передатчил 1, блок 2 формирования модул фующих частот грубого и точного отсчетов. радиопркемники 3-5, фаэометрические блоки б1и 7 с устройствами выделения и преобразования частот грубого и точного отсчета, вычислительное устройство 8, определяющее по измереншлм разностям фаз текущие координаты сельскохозяйственной машины в декартовой системе координат, дополнительно введены: блок 9 обнаружения ошибок, вход которого связан с вычислительным устройством, а выходы подключены к блокам 10 и 11 коррекции фазы и коммутатору 12, управляющему режимом работы передатчика 1, расположенного на самоходной сельскохозяйственной машине, и маркерного передатчика 13, расположенного стационар но на обрабатываемом участке поля и связанного с коммутатором кабелем. Система работает следующим образом. Выходной сигнал передатчика 1 снесущей частотой 112,5 МГц, которая модулируется суммой сигналов с частотами 1ОО кГц и 4 МГц (соответственно грубого и точного отсчетов), сформированных в блоке 2, принимается антеннами супергетеродинных приемников 3 - 5. С выхода приемника 4 сигнал в виде суммы двух частотгрубого и точного отсчетов поступает на фазометрические блоки 6 и 7 с устройствами вьаделения и преобразо- : вания частот грубого и точного отсчетов.) С выходов приемников 3 и 5 сигналы с такими же частотами поступают по кабелю на вторые входы фазометрических блоков б и 7 через блоки коррекции фазы 10 и 11.,Сигналы, снимаемые с фазометрических блоков 6 и 7, обрабатываются в вычислительном устройстве 8, которое преобразует разности фаз сигналов радиоприемников 3 - 5 в текущие координаты самоходной сельскохозяйственной машины и выдает значения этих координат в цифровой или любой иной форме, пригодной для последующегч) использования информа ° положении мобильного агрегата на При накоплении фазовых набегов в кабелях, соединяющих удаленно-фаспсхложенHbfe приемники 3 - 5 с фазометрическими блоками в вычислительном устройстве 8 военикает ошибка в определении координат, которая выявляется блоком 9 обнаружения ошибок в результате приема калибровочного радиосигнала., излучаемого маркерным передатчиком 13. В результате появления ошибки, из-за набега фа-г ы, в блоке 9 вырабатываются сигналы рассогласования, при помощп которых производится подстройка фазы в блоках 1О и 11 коррекции. Скорректированные по фазовым ошибкам .сигналы от радиоприемников 3-5 поступают через фазо метрические блоки 6 и 7 в вычислительное устройство 8, откуда снимается информация о координатах мобшшного объекта. Включение маркерного передатчика 13 для проведения коррекции фазы перед измерением кофдинат производится дистанционно, при помоиш связанного с ним коммутатора 12, который обеспечивает одновременное отключение по радиоканалу перед 104 144 измерением координат передатчика 1, расположенного на самоходной сельскохозяйственной машине. Предлагаемое построение координатномерного устройства позволяет устранить ошибки в определении координат, связанные с влиянием фазовых набегов в кабеле за счет р 13личных нестабкльностей трактов обр аботкн информации, и обеспечивает высокую точность измерения координат самоходной сельскохозяйственной машины, даже при сравнительно низкой фазовой нестабильности тракта приема р обработки сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФАЗОВАЯ РАЗНОСТНО-ГИПЕРБОЛИЧЕСКАЯ КООРДИНАТО- | 1965 |
|
SU176130A1 |
| СИСТЕМА ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИОННЫХ СООБЩЕНИЙ ПО РАДИОНАВИГАЦИОННОМУ КАНАЛУ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 2006 |
|
RU2318220C1 |
| Малогабаритная многорежимная бортовая радиолокационная система для оснащения перспективных беспилотных и вертолетных систем | 2018 |
|
RU2696274C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2008 |
|
RU2363614C1 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ НАБЕГОВ СИГНАЛА В БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ И БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2271019C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ МНОГОДИАПАЗОННАЯ МАСШТАБИРУЕМАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2496120C2 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПРЕДМЕТОВ, СПРЯТАННЫХ ПОД ОДЕЖДОЙ НА ТЕЛЕ ЧЕЛОВЕКА | 2013 |
|
RU2522853C1 |
| ФАЗОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2582068C1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1984 |
|
SU1192658A1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1984 |
|
SU1197573A1 |
ФАЗОВАЯ РАЗНОСТНО-ГИПЕР БОЛИЧЕСКАЯ КООРДИНАТНО-МЕРНАЯ /, СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ САМОХОДНЫХ СЕЛЬСКОХОи ЗЯЙСТВЕННЫХ МАШИН по авт.св. № 770444, о т л ичающаяся тем, 4Tq с целью повышения точности измерения координат самоходных сепьско- t ; хозяйственных машин за счет коррекции произвольно изменяющейся во времени фазы, система дополнительно содержит бпок обнаружения фазовых ошибок, регу - лируемые блоки коррекции фаз, коммутатор и маркерный передатчик, при этом регулируемые блоки коррекции фаз включены в разрывы кабелей, соединяюихих фазометрические блоки с приемниками, . расположенными по углам поля, и соединены с первым и вторым выходами блока обнаружения фазовых ошибок, третий выход которого соединен с коммутатором, подключенным одним выходом непоi средственно к маркерному передатчику, а другим - по радиоканалу к передатчику (Л самоходной сельскохозяйственной машины, причем вход блока обнаружения- фазовых С (ошибок соединен с выходом вычислительного устройства.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Спускная труба при плотине | 0 |
|
SU77A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
