2. Система по п. 1, отличающаяся тем, что устройство отсчета угловых координат содержит тактовое и вычислительное устройства, генератор опорной частоты, перемножитель с фильтром нижних частот и аналого-цифровой преобразователь, при этом выходы тактового усройства соединены с входами управления шифратора передающего устройства команд управления, вычислительного устройства, коммутатора приемных рамочных антенн, и аналого-цифрового преобразователя, выходы генератора опорной частоты подключены к входу передающего устройства команд управления и первому входу перемножителя, другой вход которого соединен с выходом коммутатора приемных рамочных антенн, а выход - с входом аналого-цифрового
преобразователя, выход которого связан с информационным входом вычислительного устройства, выход которого связан с входом шифратора передающего устройства команд управления.
3. Система по п. 1, отличающаяся тем, что устройство преобразования сигналов содержит дешифратор, фильтр нижних частот и усилитель, при этом приемное уст.ройство команд управления связано своими выходами с дешифратором и фильтром нижних частот, выход которого через усилитель связан с сигнальным входом коммутатора передающих рамочных антенн, управляющий вход которого соединен с одним из выходов дешифратора, другие выходы которого являются управляющими выходами системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для группового вождения самоходных сельскохозяйственных машин | 1984 |
|
SU1197573A1 |
| Устройство для поиска неоднородностей в массиве горных пород | 1983 |
|
SU1151900A1 |
| Устройство для решения краевых задач | 1983 |
|
SU1164747A1 |
| Радиолокационная станция | 2021 |
|
RU2755518C1 |
| Устройство для решения краевых задач | 1983 |
|
SU1149286A1 |
| Фазовая разностно-гиперболическая координатно-мерная система для автоматического вождения самоходных сельскохозяйственных машин | 1982 |
|
SU1047414A2 |
| УСТРОЙСТВО ПОИСКА МЕСТ УТЕЧЕК МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2010 |
|
RU2439520C1 |
| Способ построения радиолокационного запросчика | 2019 |
|
RU2713621C1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |
| Система для группового вожденияСАМОХОдНыХ СЕльСКОХОзяйСТВЕННыХМАшиН | 1979 |
|
SU818518A1 |
1. СИСТЕМА ДЛЯ ГРУППОВОГО ВОЖДЕНИЯ САМОХОДНЫХ СЕЛЬСКОХОЗЯЙСТВЕННЫХ МАШИН, содержащая установленные на ведущей и ведомой мащинах взаимно перпендикулярные рамочные антенны, отличающаяся тем, что, с целью повыщения надежности управления, устранения многозначности отсчета угловых координат и упрощения, конструкции, ведущая мащина снабжена передающим устройством команд управления с четвертьволновым вибратором на выходе и щифратором на входе, устройством отсчета угловых координат и коммутатором приемных рамочных антенн, а ведомая - приемным устройством команд управления с четвертьволновым вибратором на входе, устройством преобразования сигналов и коммутатором передающих рамочных антенн, при этом коммутатор приемных рамочных антенн связан своим выходом с входом устройства отсчета угловых координат, выход которого подключен к вхоi ду передающего устройства команд управления, а выход приемного устройства ко(Л манд управления связан с входом устройства преобразования сигналов, выход котоС рого подключен к входу коммутатора передающих рамочных, антенн. со to О) 01 00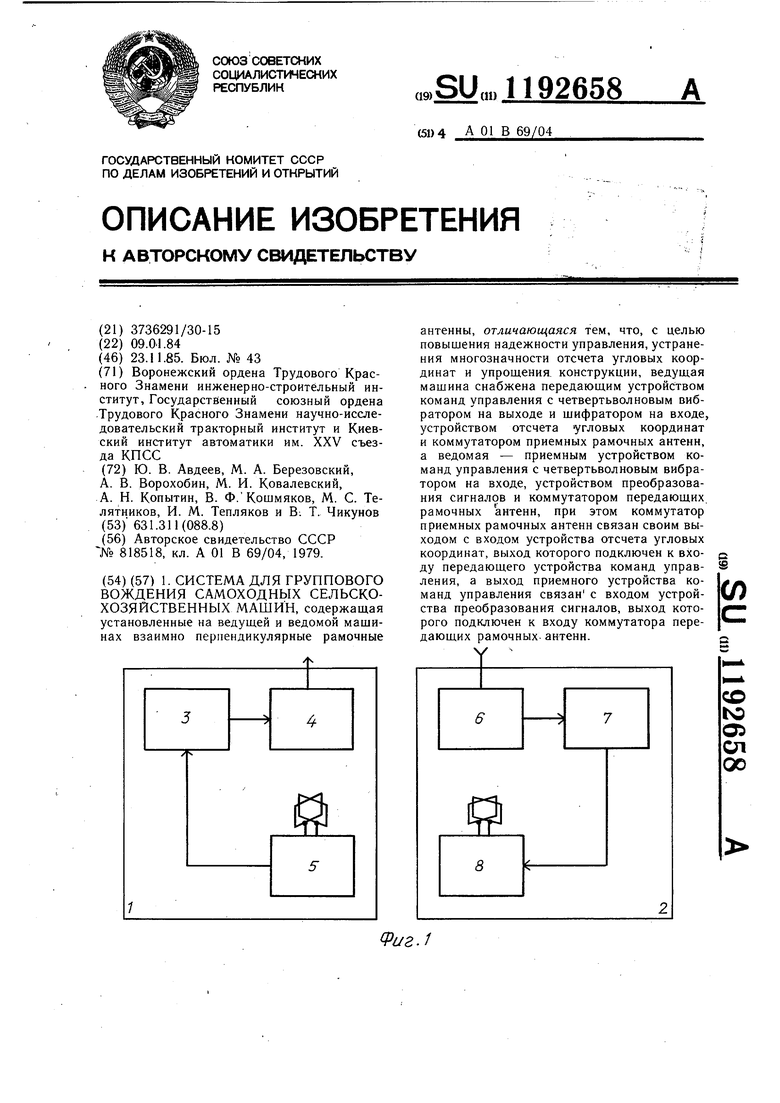
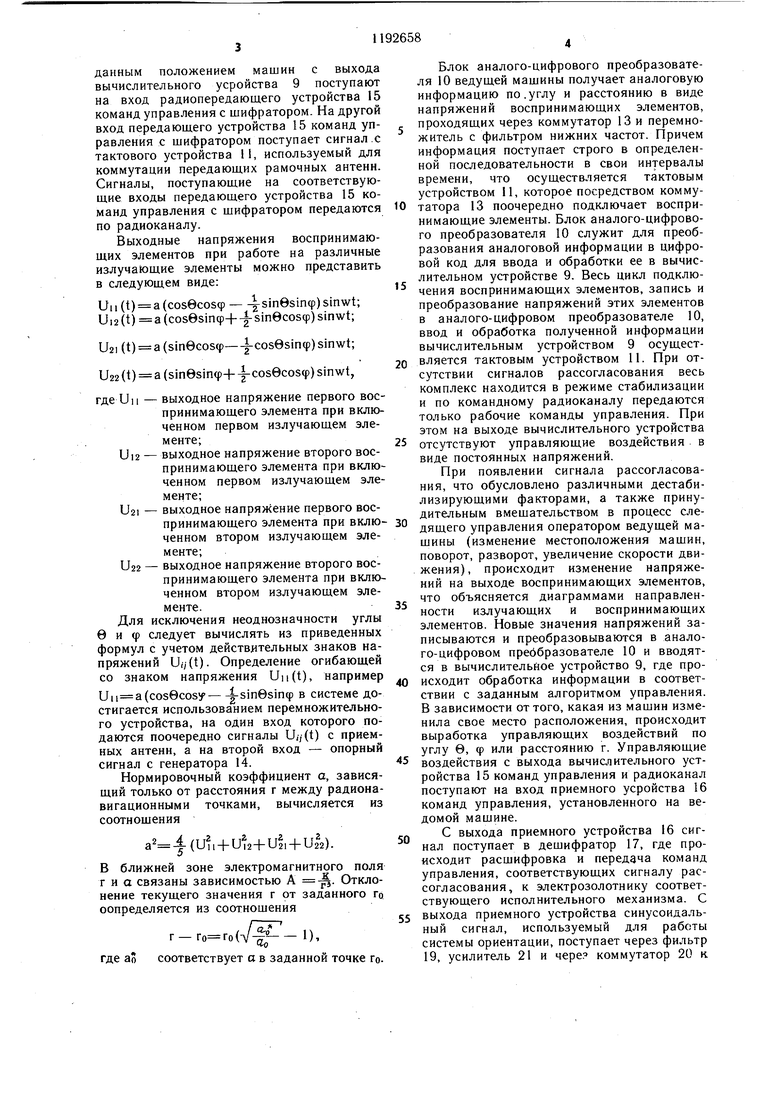
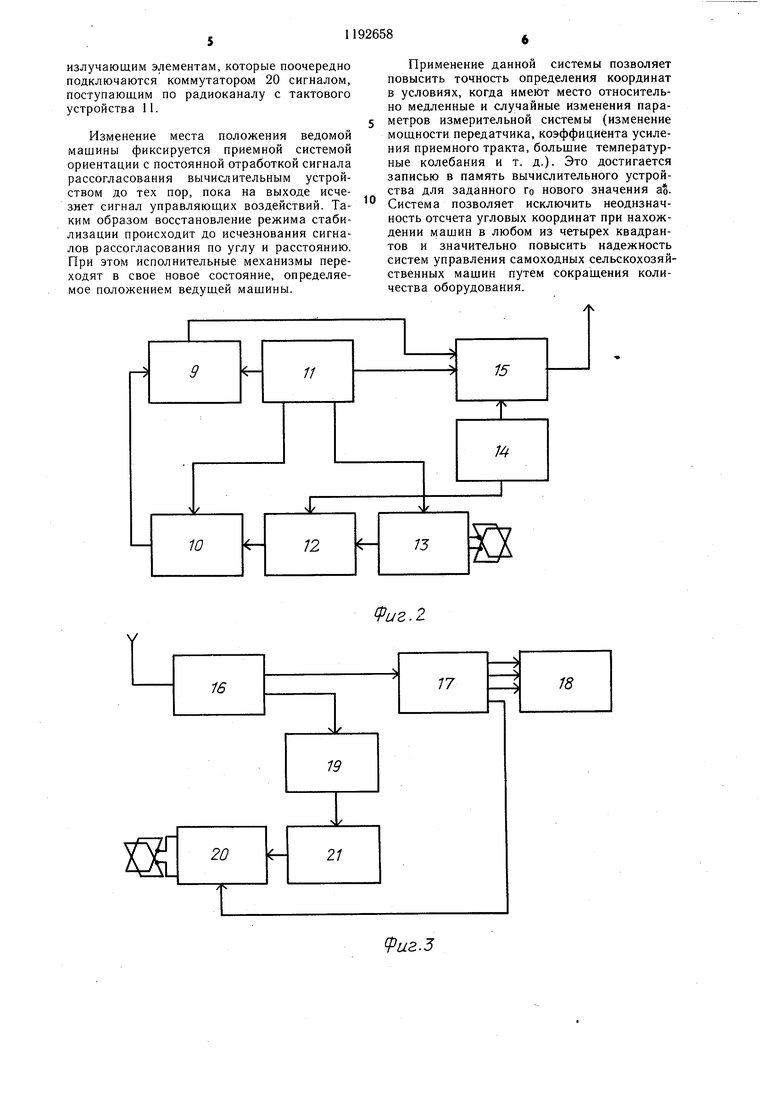
Изобретение относится к сельскохозяйственному машиностроению применительно к системам дистанционного управления движением группы самоходных сельскохозяйственных машин. Цель изобретения - повышение надежности, исключение многозначности отсчета угловых координат и сокращение количества радиоэлектронного оборудования. На фиг. 1 изображена функциональная схема системы; на фиг. 2 - функциональная схема приемных рамочных антенн с устройством отсчета угловых координат и передающим устройством команд управления с шифратором; на фиг. 3 - функциональная схема передающих рамочных антенн и приемного устройства команд управления с дешифратором; на фиг. 4 - схема отсчета курсовых углов ведущей и ведомой мащин. Система для группового вождения сельскохозяйственных машин содержит ведущую и ведомую машины 1 и 2 соответственно, устройство 3 отсчета угловых координат, передающее устройство 4 команд управления с дещифратором, коммутатор 5 с приемными рамочными антеннами, приемное устройство 6 команд управления, устройство 7 преобразования сигнала, коммутатор 8 с передающими рамочными антеннами. Функциональная схема приемных рамочных антенн с устройствами отсчета угловых координат и передающим устройством команд управления с шифратором (фиг. 2) содержит вычислительное устройство 9, ана,лого-цифровой преобразователь 10, тактовое устройство 11, перемножитель 12 с фильтром нижних частот, коммутатор 13, генератор 14, передающее устройство 15 команд управления с шифратором. Функциональная схема передающих рамочных антенн и приемного устройства команд управления с дещифратором (фиг. 3) содержит приемное устройство 16 команд управления, дешифратор 17, исполнительные механизмы 16, фильтр 19, коммутатор 20, усилитель 21. Система работает следующим образом. Сигнал, поступающий с выхода приемного устройства 16 команд управления, проходит через фильтр 19 и усилитель 21, коммутируется коммутатором 20 сигналом с выхода дещифратора 17 и излучается поочередно передающими рамочными антеннами. С других выходов дещифратора 17 преобразованный сигнал приемного устройства команд управления поступает на соответствующие исполнительные механизмы 18 мащины. Излучаемый сигнал воспринимается приемными рамочными антеннами и поступает на вход коммутатора 13, управляемого тактовым устройством 11, причем передающие и приемные рамочные антенны расположены в пространстве взаимно перпендикулярно. С выхода коммутатора сигнал поступает на вход перемножителя 12 с фильтром нижних частот, на другой вход которого и вход передающего устройства 15 команд управления с шифратором поступает сигнал с генератора 14 опорной частоты. С выхода перемножителя 12 с фильтром нижних частот сигнал поступает на вход аналого-цифрового преобразователя 10, синхронизируемого сигналами тактового устройства 11. Преобразуемый сигнал поступает на вход вычислительного устройства 9, управляемого тактовым устройством 11, где происходит отсчет угловых координат и вычисление дальности между машинами. Сигналы рассогласования текущих координат с заданным положением машин с выхода вычислительного усройства 9 поступают на вход радиопередающего устройства 15 команд управления с шифратором. На другой вход передаюш.его устройства 15 команд управления с шифратором поступает сигнал .с тактового устройства 11, используемый для коммутации передаюш,их рамочных антенн Сигналы, поступающие на соответствуюш,ие входы передающего устройства 15 команд управления с шифратором передаются по радиоканалу. Выходные напряжения воспринимающих элементов при работе на различные излучающие элементы можно представить в следующем виде: Ui 1 (t) а (созвсозфi- 51пв8Шф) sinwt; и 12 (t) а (со8в5тф+ -у з1пвсо5ф) sinwt; U2i(t) a(sinecos9-|-со8вз пф) sinwt; U22 (t) а (sinвsinф-4- -|-cosвcosф) sinwt, где Uii - выходное напряжение первого вос принимающего элемента при включенном первом излучающем элементе;и 12 -выходное напряжение второго воспринимающего элемента при включенном первом излучающем элементе;U21 - выходное напряжение первого воспринимающего элемента при включенном втором излучающем элементе;U22 - выходное напряжение второго воспринимающего элемента при включенном втором излучающем элементе. Для исключения неоднозначности углы в и ф следует вычислять из приведенных формул с учетом действлтельных знаков напряжений U,,(t). Определение огибающей со знаком напряжения Uii(t), например (cosecosy|-sinвsinф в системе достигается использованием перемножительного устройства, на один вход которого подаются поочередно сигналы U/,-(t) с приемных антенн, а на второй вход - опорный сигнал с генератора 14. Нормировочный коэффициент а, зависящий только от расстояния г между радионавигационными точками, вычисляется из соотнощения (Uu + + Ui + U22). в ближней зоне электромагнитного поля т и а связаны зависимостью А -. Отклонение текущего значения г от заданного го оопределяется из соотношения ), г - (соответствует о в заданной точке го. Блок аналого-цифрового преобразователя 10 ведущей машины получает аналоговую информацию по.углу и расстоянию в виде напряжений воспринимающих элементов, проходящих через коммутатор 13 и перемножитель с фильтром нижних частот. Причем информация поступает строго в определенной последовательности в свои интервалы времени, что осуществляется тактовым устройством 11, которое посредством коммутатора 13 поочередно подключает воспринимающие элементы. Блок аналого-цифрового преобразователя 10 служит для преобразования аналоговой информации в цифровой код для ввода и обработки ее в вычислительном устройстве 9. Весь цикл подключения воспринимающих элементов, запись и преобразование напряжений этих элементов в аналого-цифровом преобразователе 10, ввод и обработка полученной информации вычислительным устройством 9 осуществляется тактовым устройством 11. При отсутствии сигналов рассогласования весь комплекс находится в режиме стабилизации и по командному радиоканалу передаются только рабочие команды управления. При этом на выходе вычислительного устройства отсутствуют управляющие воздействия в виде постоянных напряжений. При появлении сигнала рассогласования, что обусловлено различными дестабилизирующими факторами, а также принудительным вмешательством в процесс следящего управления оператором ведущей машины (изменение местоположения машин, поворот, разворот, увеличение скорости движения), происходит изменение напряжений на выходе воспринимающих элементов, что объясняется диаграммами направленности излучающих и воспринимающих элементов. Новые значения напряжений записываются и преобразовываются в аналого-цифровом преобразователе 10 и вводятся в вычислительное устройство 9, где происходит обработка информации в соответствии с заданным алгоритмом управления. В зависимости оттого, какая из машин изменила свое место расположения, происходит выработка управляющих воздействий по углу 0, ф или расстоянию г. Управляющие воздействия с выхода вычислительного устройства 15 команд управления и радиоканал поступают на вход приемного усройства 16 команд управления, установленного на ведомой мащине. С выхода приемного устройства 16 сигнал поступает в дешифратор 17, где происходит расшифровка и передача команд управления, соответствующих сигналу рассогласования, к электрозолотнику соответствующего исполнительного механизма. С выхода приемного устройства синусоидальный сигнал, используемый для работы системы ориентации, поступает через фильтр 19, усилитель 21 и чере коммутатор 20 к
излучающим элементам, которые поочередно подключаются коммутатором 20 сигналом, поступающим по радиоканалу с тактового устройства 11.
Изменение места положения ведомой машины фиксируется приемной системой ориентации с постоянной отработкой сигнала рассогласования вычислительным устройством до тех пор, пока на выходе исчезнет сигнал управляющих воздействий. Таким образом восстановление режима стабилизации происходит до исчезнования сигналов рассогласования по углу и расстоянию. При этом исполнительные механизмы переходят в свое новое состояние, определяемое положением ведущей мащины.
Применение данной системы позволяет повысить точность определения координат в условиях, когда имеют место относительно медленные и случайные изменения параметров измерительной системы (изменение мощности передатчика, коэффициента усиления приемного тракта, больщие температурные колебания и т. д.). Это достигается записью в память вычислительного устройства для заданного го нового значения ао. Система позволяет исключить неоднзначность отсчета угловых координат при нахождении мащин в любом из четырех квадрантов и значительно повысить надежность систем управления самоходных сельскохозяйственных мащин путем сокращения количества оборудования.
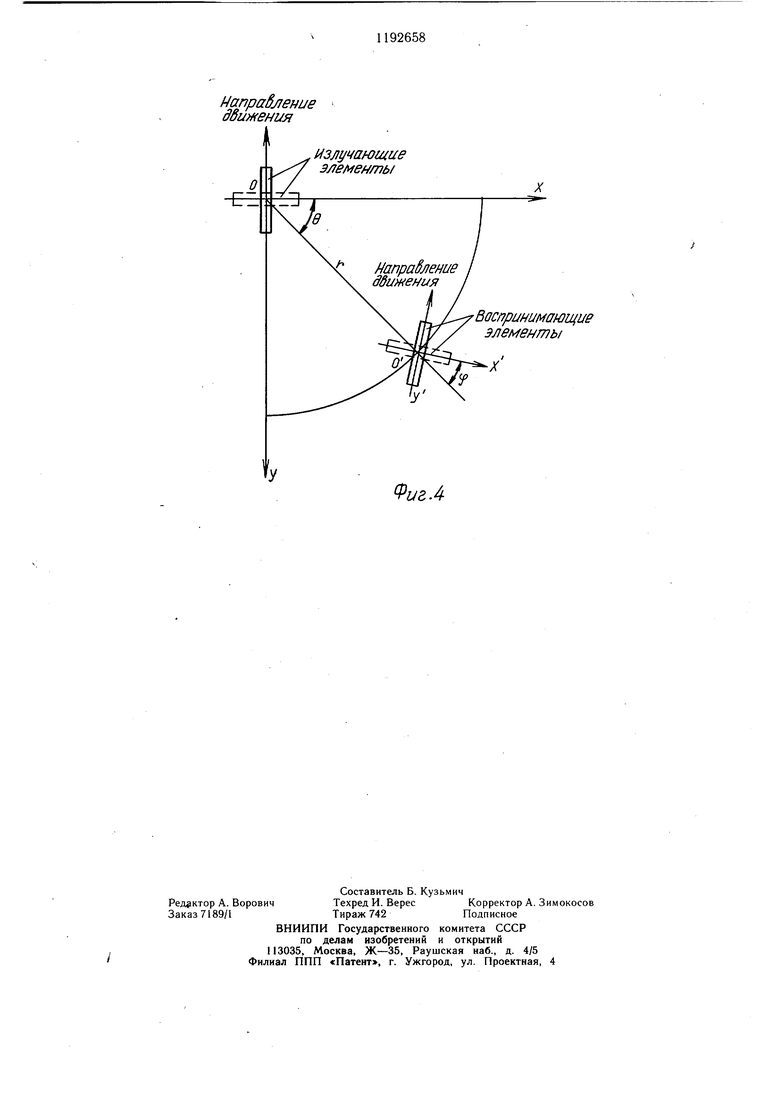
Напрабмение дВи ления
элементы
X
Воспраиимашщие элементы
Фиг Л
| Система для группового вожденияСАМОХОдНыХ СЕльСКОХОзяйСТВЕННыХМАшиН | 1979 |
|
SU818518A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
