Предлагаемое изобретение относится к радиолокационным системам и предназначено для использования в качестве вертолетной или самолетной бортовой радиолокационной станции (БРЛС) для обзора земной или водной поверхности и обнаружения на ней объектов в режимах радиолокационного картографирования.
Известны зарубежные и отечественные бортовые самолетные и вертолетные радиолокаторы, в которых для радиолокационного картографирования с высоким разрешением земной поверхности применяют режим синтезирования апертуры антенны.
Высокое разрешение по азимуту в таких радиолокаторах достигается в результате использования летательным аппаратом отрезка пути, называемого интервалом синтезирования, в качестве искусственной антенны.
Синтезированная апертура антенны реализуется в результате суммирования отраженных сигналов при когерентном излучении. Для получения высокого разрешения по азимуту синтезированная апертура антенны (СА), как и оптическая система, фокусируется на определенный участок поверхности на заданной дальности. Как и в оптике, процесс фокусирования состоит в том, что сигналы от всех точек поверхности синфазно складываются в одной точке (фокусе).
Процесс синтезирования апертуры антенны, получение сигнала, характеризующего радиолокационную информацию (РЛИ), сводится к реализации соотношения (Итоги науки и техники. Радиотехника, том 36, М., 1986 г.)
где:  - аддитивная смесь полезного сигнала и шума в комплексной форме;
- аддитивная смесь полезного сигнала и шума в комплексной форме;
 - опорная функция системы обработки,
- опорная функция системы обработки,
t - время,
Tc - временной интервал синтезирования апертуры антенны,
α - угловая координата точки участка местности в нормальной системе координат.
Обработка сигналов в радиолокационной системе с синтезированной апертурой антенны (РСА) основывается на согласовании опорной функции с отраженным от точечной цели сигналом:

где: A(t) - функция, характеризующая интенсивность отраженного сигнала;
r(t,α) - текущее расстояние между летательным аппаратом и целью;
λ -длина излучаемой волны;
ϕ -случайная начальная фаза на интервале синтезирования.
В качестве опорной функции выбирается взвешенная функция, обеспечивающая фокусирование апертуры антенны, сопряженная с отраженным от точечной цели сигналом с точностью до начальной фазы.
где: H(t) - весовая функция, обеспечивающая требуемый уровень боковых лепестков синтезированной апертуры антенны.
Для фокусировки точки поверхности на заданной дальности опорная функция должна быть комплексно сопряжена с отраженным сигналом и вычисляется с точностью до начальной фазы.
Как известно (Итоги науки и техники. Радиотехника, том 36, М., 1986 г.), закон изменения фазы принятого траекторного сигнала (сигнала при движении летательного аппарата по траектории) от точечной цели может быть представлен (при ограничении ряда разложения):
где: Vr, αr - радиальные скорость и ускорение движения фазового центра на точку; ϕ0 - начальная фаза сигнала.
Для фокусировки точки поверхности на заданной дальности с помощью опорной функции на борту летательного аппарата эти параметры измеряют с точностью, определяемой допустимой фокусировкой (получение заданного разрешения элемента по азимуту) и допустимыми геометрическими искажениями (получение минимального сдвига по азимуту).
В общем случае при синтезировании апертуры антенны управление СА осуществляется с помощью опорной функции. Закон управления СА определяется видом обзора облучаемой поверхности. Однако независимо от вида обзора характер и параметры сигналов управления вычисляют на основе априорных данных о режиме полета, либо с использованием измеренных значений параметров движения летательного аппарата.
При произвольной траектории, когда она изменяется от одного интервала синтезирования к другому, опорная функция определяется для каждого интервала отдельно во время полета летательного аппарата. При равномерном горизонтальном прямолинейном полете носителя РСА нормально функционирует. Однако при реальном полете носителя (истребителя или вертолета) возникают траекторные нестабильности, вызванные угловыми колебаниями, случайными изменениями скорости, воздействием внешней среды, шумами, вызванными системой управления летательного аппарата и др.
Такие траекторные нестабильности приводят к амплитудным и фазовым искажениям отраженных сигналов и при фиксированной опорной функции нарушают оптимальность обработки радиосигналов, нарушают фокусировку отраженного сигнала и в конечном счете ухудшают качество картографирования.
Для получения в РСА высокого разрешения по азимуту в реальном полете принимают специальные меры, направленные на уменьшение влияния траекторных нестабильностей.
Наиболее распространенным подходом к решению этой проблемы является применение способа компенсации фазовых искажений принимаемого сигнала на интервале синтезирования на основе измерения параметров движения летательного аппарата. Измеряя параметры движения летательного аппарата в нормальной инерциальной системе координат X, Y, Z - величин составляющих скорости VX, VY, VZ и составляющих ускорений aX, aY, aZ на интервале синтезирования, вычисляют параметры движения фазового центра реальной антенны - скорости "Vr" и ускорения "аr", направленных по линии визирования на объект. На основе этих измерений вычисляют фазовые изменения траекторного отраженного сигнала и с помощью опорной функции (см. формулу (1)) компенсируют эти фазовые набеги при обработке сигналов.
На летательных аппаратах для измерения параметров движения используют инерциальные навигационные системы (ИНС), при этом для измерения параметров движения фазового центра антенны, установленной в носовой части, применяется дополнительная специальная ИНС, установленная в месте расположения антенны.
Кроме того, для улучшения характеристик измерения параметров движения применяют специальные акселерометры, измеряющие линейные ускорения по трем осям в инерциальной системе координат.
В известном способе компенсации при обработке сигнала методом гармонического анализа путем преобразования Фурье, сигналы радиолокационного изображения одной стробированной полоски дальности на выходе системы обработки могут быть описаны:

где SBX(t;αi) - комплексный сигнал на входе системы обработки, отраженный от объекта, расположенного под углом αi относительно вектора скорости;
t - текущее время на интервале движения антенны,
Тc - время синтезирования
Sвх(t;αi)=A(t;αi)ejϕ(t;αi)
A(t;αi) - амплитуда сигнала,
ϕ(t;αi) - фаза сигнала,
h(t) - опорная функция, комплексно сопряженная с сигналом, отраженным от объекта (при ограничении ряда разложения), рассчитываемая на основе измерения параметров движения фазового центра антенны;

где H(t) - весовая функция, определяющая заданный уровень боковых лепестков,
Vr - составляющая скорости движения фазового центра антенны в направлении на объект,

где: VX - составляющая скорости по оси ОХ,
VY - составляющая скорости по оси OY,
VZ - составляющая скорости по оси OZ,
τ - интервал времени,
αr - составляющая ускорения движения фазового центра антенны в направлении на объект,
αi - угол в азимутальной плоскости,
ε - угол в угломестной плоскости,

где:
αx - ускорение по оси ОХ,
αy - ускорение по оси OY,
αZ - ускорение по оси OZ,
Из уравнения (1) следует, что второй член уравнения имеет квадратичную зависимость от времени и при наличии ошибки измерения ускорения "dar" имеет параболический характер: 
Максимальный набег фазы на концах интервала синтезирования будет составлять: 
Известно, что в зависимости от величины ошибки по ускорению "dar", приводящей к набегу фазы, появляется расширение спектра отражений от фокусируемой точки. Так набег фазы на интервале синтезирования,  приводит к ухудшению разрешения более чем на 10%. (Итоги науки и техники. Радиотехника. Том 36. М., 1986 г.)
приводит к ухудшению разрешения более чем на 10%. (Итоги науки и техники. Радиотехника. Том 36. М., 1986 г.)
При когерентной фильтрации такие ошибки по ускорению приводят также к уменьшению амплитуды сигнала, приводящей к потере яркости и уменьшению контрастности. Наиболее заметное воздействие на синтезированную диаграмму направленности оказывают низкочастотные ошибки измерения ускорения.
Приведенный способ компенсации фазовых набегов сигнала реализуется в известных самолетных и вертолетных БРЛС, работающих в режиме синтезирования апертуры антенны, таких как БРЛС с синтезированной апертурой антенны для обнаружения наземных объектов фирмы "Hughes" APG-65, размещаемая на самолете истребителе F-16 или БРЛС-APG-70, устанавливаемая на самолете F-15 США, а также в бортовой самолетной радиолокационной станции картографирования земной поверхности (США, заявка № 756455 от 3/1-1977 г. МКИ G 01 S - 13/90). Эти БРЛС с синтезированной апертурой антенны за счет движения самолета обеспечивают картографирование земной поверхности с высоким угловым разрешением.
Как следует из описания, последняя РЛС предназначена для картографирования земной поверхности как в режиме бокового, так и переднебокового обзора. Ближайшим техническим решением к предлагаемому способу компенсации является способ компенсации фазовых набегов сигнала с помощью инерциальной навигационной системы, в вертолетной радиолокационной системе, приведенной в патенте RU N 2147136, G 01 S 13/00, 13/90 с приоритетом от 12.03.1997 г.
Эта БРЛС обеспечивает картографирование подстилающей поверхности в режиме синтезирования апертуры антенны.
В этой станции при синтезировании апертуры антенны применяется выше рассмотренный способ компенсации набега фазы сигнала, использующий измерение параметров движения носителя Vx; Vy; Vz и ax; ay; az с помощью инерциальной платформы.
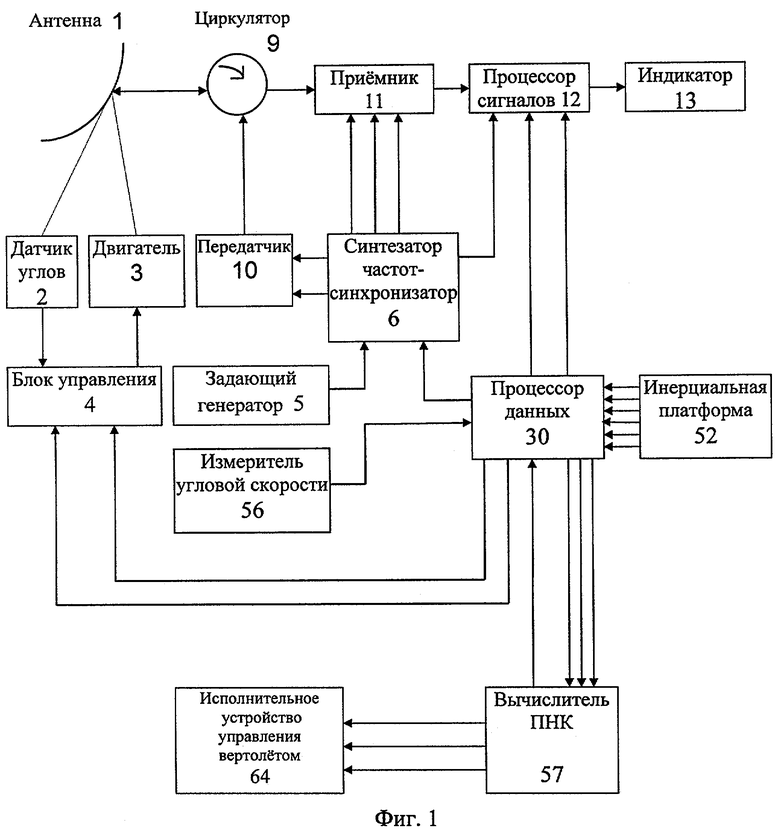
На фиг.1 представлена блок-схема прототипа вертолетной радиолокационной системы, где:
Антенна - 1;
датчик углов антенны - 2;
двигатель антенны по азимуту - 3;
блок управления антенной - 4;
задающий генератор 5;
синтезатор частот - синхронизатор - 6;
циркулятор - 9;
передатчик - 10;
приемник - 11;
процессор сигналов - 12;
индикатор - 13;
процессор данных и управления РЛС - 30;
инерциальная платформа - 52;
измеритель угловой скорости 56;
вычислитель пилотажно-навигационного комплекса (ПНК) - 57;
исполнительное устройство управления вертолетом - 64.
Как следует из описания прототипа БРЛС, синтезированная апертура антенны при зависании вертолета формируется за счет вращательного движения фазового центра антенны, установленной в носовой части вертолета. При этом в качестве апертуры антенны принимается длина траектории по хорде окружности движения фазового центра.
При прямолинейном движении вертолета синтезированная апертура антенны формируется за счет перемещения фазового центра на отрезке пути антенны, перпендикулярном направлению на объект. В процессе движения вертолета для получения синтезированной апертуры производится когерентное суммирование сигналов, отраженных от наземных объектов. Возможность когерентного суммирования принятых при движении и эволюциях вертолета сигналов обеспечивается путем компенсации фазовых изменений принимаемых сигналов доплеровской частоты. Компенсация проводится на основе измерений параметров движения вертолета инерциальной платформой 52.
В процессе движения вертолета при работе БРЛС в процессоре данных 30 синхронизуемым сигналом "fпd", поступающим из синхронизатора частот 6, для компенсации фазовых набегов сигнала формируется опорная функция, комплексно сопряженная с сигналом, отраженным от объекта, для каждого элемента дальности и каждого периода повторения двух квадратур сигнала, и накапливается в памяти. Коэффициенты опорной функции для каждого элемента дальности и каждого периода повторения вычисляются на основе измерений параметров движения носителя, составляющих скорости носителя Vx, Vy, Vz и составляющих ускорений носителя ax, ay, az, угла курса "ψ", определяемых инерциальной платформой 52 и угла направления на объект "εг". По окончании набора массива сигналов на заданном интервале синтезирования накопленный в памяти процессора сигналов 12 массив сигналов двух квадратур для каждого элемента дальности и каждого периода повторения перемножается в умножителях с одноименными отсчетами каждого элемента дальности и периода повторения опорной функции, поступающими из памяти процессора 30. С выходов схем разности и суммы после умножения массив сигналов двух квадратур поступает в процессор быстрого преобразования Фурье (БПФ), где подвергается гармоническому анализу. Результатом преобразования сигналов из временной области в частотную являются частотные (азимутальные) отсчеты двух квадратур радиолокационной информации в каждом элементе дальности.
Затем из отсчетов массива сигналов двух квадратур формируются модули сигналов, которые поступают в индикатор 13. Как следует из построения БРЛС прототипа, для получения в БРЛС высокого разрешения по азимуту в реальном полете приняты меры, направленные на уменьшение влияния траекторных нестабильностей. Решение этой проблемы обеспечивается компенсацией фазовых набегов принимаемого сигнала на интервале синтезирования на основе измерения параметров движения летательного аппарата.
Для этого измеряют параметры движения летательного аппарата в нормальной инерциальной системе координат - величины скоростей Vx, Vy, Vz и ускорений ax, ay, az на интервале синтезирования и вычисляют параметры движения фазового центра реальной антенны - скорости "Vr" и ускорения "аr", направленные по линии визирования. На основе этих измерений вычисляют фазовые изменения траекторного отраженного сигнала и с помощью опорной функции (см. формулу (1)) компенсируют эти фазовые набеги при обработке сигнала. Однако, как показывает анализ работы РСА с применением инерциальной платформы, по целому ряду параметров последняя не удовлетворяет предъявленным требованиям по воспроизведению закона изменения фазы отраженного сигнала для получения в РСА высокого разрешения по азимуту (Итоги науки и техники. Радиотехника, том 36, М., 1986 г.; Зарубежная радиоэлектроника, №3, 1983 г., М.: "Радио и связь").
Применение дополнительных к инерциальной платформе специальных акселерометров для измерения ускорений по трем осям улучшает характеристики измерения параметров движения, однако из-за конечного значения точности измерений и невозможности их размещения вблизи фазового центра антенны не решает проблемы получения необходимого высокого разрешения по азимуту при маневрах летательного аппарата. Так, характеристики выпускаемых отечественных акселерометров по точности измерения более чем на порядок уступают требуемой точности для получения необходимого высокого, а тем более сверхвысокого линейного разрешения по азимуту (0,5м) (например, по техническим условиям работы на датчик, выпускаемый АО НПП "Темп-АВИА" г.Арзамас, ошибка измерения составляет 1,5% от измеряемой величины, тогда как для получения высокого разрешения ошибка не должна превосходить 0,05%). Это обстоятельство является главным недостатком способа компенсации фазовых изменений, применяющегося в БРЛС прототипа и приведенных аналогов, использующего датчики линейных ускорений, ошибки измерения которых определяют величину фазовых набегов сигнала и не позволяют получить необходимое высокое разрешение по азимуту.
Задача данного изобретения заключается в получении высокого разрешения по азимуту в БРЛС с СА на летательных аппаратах с датчиками измерения линейных ускорений способом компенсации фазовых набегов сигнала при эволюции и ускорении носителя.
Для решения этой задачи принятый и запомненный на интервале синтезирования массив сигналов, отраженных от наземных объектов, в процессоре сигналов проходит обработку в два этапа. На первом этапе массив сигналов умножают на комплексно сопряженную с сигналом опорную функцию, в результате чего компенсируют фазовые набеги сигналов, связанные с движением и ускорениями фазового центра антенны.
При этом опорную функцию формируют на основе измерения параметров движения фазового центра антенны, составляющих скорости Vx; Vy; Vz, измеренных инерциальной навигационной системой (ИНС), и ускорений ax; ay; az, измеренных датчиками линейных ускорений.
На втором этапе обработки полученный на первом этапе и накопленный в памяти процессора сигналов массив сигналов последовательно умножают на комплексно сопряженные корректирующие функции, найденные по задаваемому критерию оценки качества радиолокационной информации на основе определения максимальных ошибок измерения линейных ускорений ах; ay; az; датчиками на интервале синтезирования. В результате обработки массива сигналов на втором этапе компенсируют фазовые набеги сигнала, вызванные ошибками измерения линейных ускорений датчиками до допустимой (заданной) величины. При этом качество радиолокационной информации соответствует заданному критерию (величина разрешения, контрастность, динамический диапазон и др.).
При проведении компенсации фазового набега, из-за наличия траекторных нестабильностей измеренная датчиками величина ускорения фазового центра антенны по линии визирования на объект будет:
 где:
где:
dax - ошибка датчика ускорений по оси ОХ,
day - ошибка датчика ускорений по оси OY,
daz - ошибка датчика ускорений по оси OZ.
При наличии ошибки измерения датчиками величина фазового набега, оставшаяся после компенсации максимального набега фазы за счет ускорения, определяется следующей формулой:  , где
, где
dar, - ошибка измерения ускорения датчиками по радиальному направлению;
Для обеспечения требуемой разрешающей способности ошибка датчиков dar не должна превышать допустимой величины dar доп
При допустимой величине фазового набега Δϕдоп допустимая величина будет: 
Для снижения влияния ошибок измерения датчиками и доведения этой ошибки до допустимой величины используется свойство датчика коррелировать ошибки измерения с измеряемой величиной ускорения. Например, в датчике АТ-1104 при температуре окружающей среды t°=const на коротких интервалах синтезирования Тc≤5с. закон изменения ошибки измерения ускорения датчиком повторяет закон изменения ускорения, измеренного датчиком (при ограничении величины ускорения): da(t)=ξ·a(t);
где
da(t) - закон изменения ошибки;
a(t) - закон изменения ускорения;
ξ - коэффициент, определяющий значение ошибки измерения ускорения датчиком.
В технических условиях на датчик задается только максимальное значение ошибки измерения, в то время как реальная ошибка датчика при измерениях в полете, которая определяет остаточную некомпенсированную фазу, оказывается неизвестной. Однако, используя свойство датчика, представляется возможным провести компенсацию фазовых набегов, вызванных реальными ошибками датчиков в полете до допустимых величин при конкретном измерении на интервале синтезирования.
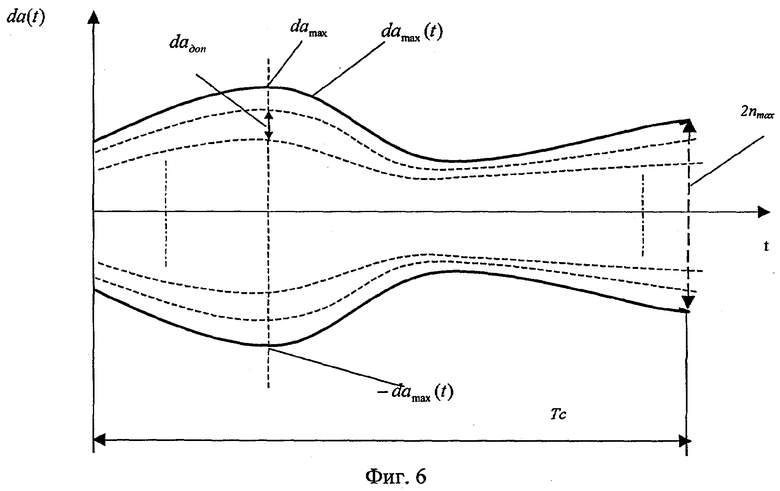
Такая возможность обеспечивается тем, что реальная ошибка измерения в полете лежит в диапазоне максимальных значений ошибок измерения ускорения и решение поставленной задачи в предложенном способе компенсации может быть обеспечено предложенным процессом обработки принятого сигнала. Для этого максимальный диапазон ошибок измерения во времени, определяемых датчиком ускорений, разбивают на "2n" поддиапазонов (см. фиг.6). После чего принятый и заложенный в памяти процессора массив сигналов отражений от поверхности последовательно умножают на каждую корректирующую сигнал по фазе функцию, в которую для расчета компенсирующей фазы последовательно во времени задают значения ошибок датчиков по ускорению соответствующего поддиапазона.
После каждого умножения массива на каждую корректирующую функцию проводят быстрое преобразование Фурье, находят модуль сигнала и полученное РЛИ помещают в память процессора.
После проведения каждой из 2n компенсаций фазовых искажений первично накопленного массива сигналов, оценивают качество РЛИ по одному из выбранных критериев: величине разрешения, динамическому диапазону или контрастности. Выбор критерия определяется условиями применения РЛС и постановкой задачи.
По результатам 2n итераций на основе полученных значений выбранного критерия определяют и выдают на экран индикатора массив РЛИ, соответствующий наилучшему значению критерия, при этом изменения фазы скомпенсированы до заданной допустимой величины.
Предложенный способ компенсации фазовых набегов сигнала в БРЛС с СА определяет следующий алгоритм работы аппаратуры на интервале синтезирования:
1. При движении летательного аппарата с БРЛС в режиме излучения и приема проводят набор массива принятых сигналов отражений от поверхности и запоминают его.
2. Измеряют параметры движения фазового центра антенны, составляющих скорости Vx; Vy; Vz и линейных ускорений ax; ay; az в нормальной системе координат X, Y, Z, например, посредством инерциальной навигационной системы (ИНС) и датчиками измерения линейных ускорений, и их величины во времени запоминают.
3. По измеренным параметрам движения фазового центра антенны Vx; Vy; Vz и ax; ay; az вычисляют фазовые коэффициенты опорной функции:

4. Проводят предварительное (первый этап) умножение массива сигналов на комплексно сопряженную с сигналом опорную функцию, при этом результат умножения сигналов на опорную функцию закладывают в память и над массивом сигналов проводят операцию быстрого преобразования Фурье.

5. По результатам преобразования Фурье проводят отбор наиболее контрастных элементов в каждом элементе дальности. Для каждого сигнала в каждом элементе дальности находят максимальное значение амплитуды сигнала Umax и вычисляют контрастность:
где Umax - максимальное значение амплитуды сигнала точечного объекта,
Ucp - среднее значение сигнала в соседних элементах соответственно.
Если С≥А, то объект является контрастным
где: А - принятое значение контрастности.
6. Из всего массива сигналов путем сравнительных оценок выявляют элемент дальности nd и элемент азимута l, в котором сигнал имеет максимальную контрастность "Сmax" (Cmaxn+1≥Cmaxn).
7. По ускорениям, измеренным каждым из трех датчиков, определяют максимальное значение ошибок ускорения во времени по формуле:

где ξ - коэффициент, определяющий значение ошибки измерения ускорения датчиком.
8. Исходя из требуемого разрешения, при допустимом изменении фазы Δϕдоп на интервале синтезирования определяют допустимую величину ошибки по ускорению:
9. Определяют максимальное количество корректирующих функций по допустимому некомпенсированному значению ускорения по осям X, Y, Z для их использования в режиме компенсации:
Процедуру проделывают для каждого из датчиков по осям OX, OY, OZ.
10. На интервале синтезирования на основе записи величины ускорения по осям OX, OY, OZ вычисляют значения ошибок ускорения во времени по соответствующим осям для каждой корректирующей функции:

где 
11. Вычисляют значения ошибок составляющих ускорений для каждой корректирующей функции, измеренные каждым из датчиков, на направление на объект (радиальное направление).



12. Вычисляют массивы значений корректирующих функций hnx;y;z во времени (по осям OX, OY, OZ):
где, Δϕx,y,z(t) - значения фазового набега за счет ошибок ускорений, измеренных датчиками. Значения массивов корректирующих функций по осям OX, OY, OZ во времени закладывают в память.
13. Массив сигналов, отраженных от поверхности, умноженных на опорную функцию в элементе дальности nd, где был определен сигнал с максимальной контрастностью, заложенный в памяти, умножают на комплексно-сопряженную с сигналом корректирующую функцию hnx.
При этом последовательно для всех 2n корректирующих функций по координате "X" находят:
а)  где
где
Um - амплитуда сигнала массива после умножения на опорную функцию;
m - номер отсчета сигнала отражений и величины ускорения на интервале синтезирования;
ψ{t) - значения некомпенсированного фазового набега за счет ошибок измерения ускорения датчиком.
Каждый раз после умножения на значения одной из 2n корректирующих функций проводят быстрое преобразование Фурье (БПФ) и его результат заносят в память, при этом результат умножения сигналов на фазовые коэффициенты корректирующей функции также закладывают в память. После умножения на все 2n корректирующие функции hnx (при воздействии ускорений по оси "Х") и проведения БПФ, по критерию оценки качества РЛИ (например, по максимальной контрастности) скомпенсированный по фазовым искажениям (за счет ошибок ускорения по оси "Х") массив сигналов в элементе дальности "nd" запоминают.
б) Заложенный в память массив сигналов в элементе дальности nd, скорректированный функцией "hnx", умножают на корректирующие функции координаты "Y" "hny" с вышеизложенным процессом обработки.
в) Аналогично проводят обработку с умножением на корректирующую функцию координаты "Z" "hnz".
Таким образом, массив сигналов РЛИ, определенный в элементе дальности по критерию максимальной контрастности "Сmax" при последнем умножении, является скомпенсированным по ускорению с допустимой ошибкой "darдоп" для заданного критерия качества РЛИ (например, контрастность, разрешение, динамический диапазон).
А найденные по критерию качества радиолокационной информации корректирующие функции hnx, hny, hnz учитывают реальные ошибки измерения линейных ускорений датчиками (с заданным допуском) и могут быть использованы для коррекции массива сигналов во всех элементах дальности.
Ниже приводится бортовая радиолокационная система, в которой реализован приведенный способ компенсации, решающий задачу получения высокого (заданного) разрешения по азимуту в режиме синтезированной апертуры антенны при использовании датчиков измерения ускорений.
1) На фиг.1 приведена блок-схема прототипа.
2) На фиг.2 представлена блок-схема предложенной БРЛС. В предлагаемую БРЛС входят:
- антенна - 1;
- циркулятор - 2;
- передатчик - 3;
- задающий генератор - 4;
- синтезатор частот - синхронизатор - 5;
- приемник - 6, состоящий из поз.7-12 (см.фиг.3);
- процессор сигналов - 13, состоящий из поз.14-28 и 30-53 (см. фиг.4);
- индикатор - 29;
- процессор данных - 54, состоящий из поз.61-104 (см.фиг.5);
- датчик линейных ускорений по оси "OX" - 55;
- аналого-цифровой преобразователь - 56;
- датчик линейных ускорений по оси "OY" - 57;
- аналого-цифровой преобразователь - 58;
- аналого-цифровой преобразователь - 59;
- датчик линейных ускорений по оси "OZ" - 60;
- инерциально -навигационная система - 69.
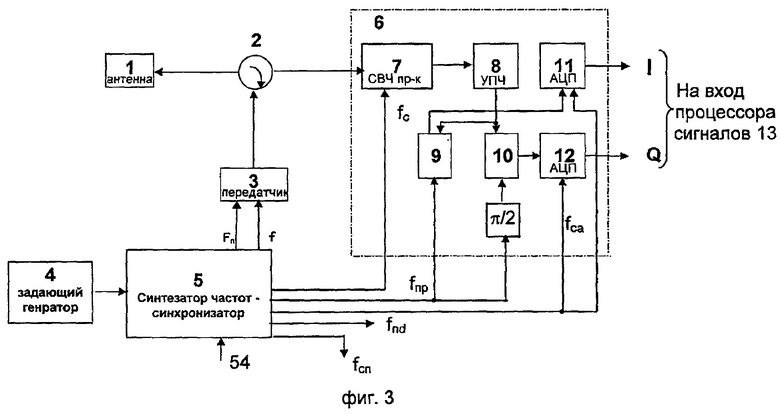
3) На фиг.3 приведена развернутая структурная схема приемника БРЛС:
- приемник - 6;
- СВЧ приемник - 7;
- УПЧ - 8;
- фазовый детектор - 9;
- фазовый детектор 10;
- АЦП - 11;
- АЦП - 12.
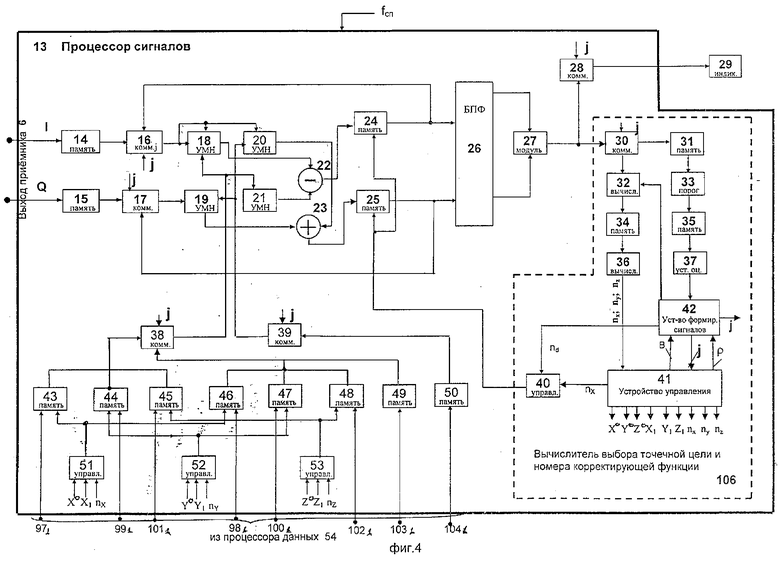
4) На фиг.4 представлена развернутая структурная схема, поясняющая работу процессора сигналов 13 в режиме синтезирования:
- устройство памяти - 14;
- устройство памяти - 15;
- коммутатор - 16;
- коммутатор - 17;
- умножитель - 18;
- умножитель - 19;
- умножитель - 20;
- умножитель - 21;
- устройство разности - 22;
- устройство суммы - 23;
- устройство памяти - 24;
- устройство памяти - 25;
- процессор БПФ - 26;
- устройство модуля - 27;
- коммутатор - 28;
- индикатор - 29;
- коммутатор - 30;
- устройство памяти - 31;
- вычислитель - 32;
- пороговое устройство - 33;
- устройство памяти - 34;
- устройство памяти - 35;
- вычислитель - 36;
- устройство оценки параметров - 37;
- коммутатор - 38,
- коммутатор - 39;
- устройство управления - 40;
- устройство управления - 41,
- устройство формирования - 42,
- устройство памяти - 43;
- устройство памяти - 44;
- устройство памяти - 45;
- устройство памяти - 47;
- устройство памяти - 48;
- устройство памяти - 49,
- устройство памяти - 50;
- устройство управления - 51;
- устройство управления - 52;
- устройство управления адреса - 53;
- вычислитель адреса точечной цели
и номера корректирующей функции - 106, его образуют элементы 30-37, 40-42.
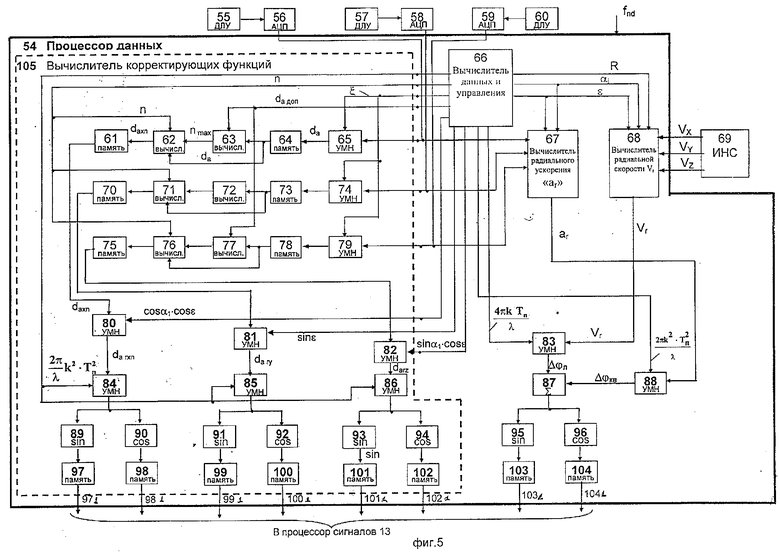
5) На фиг.5 представлена развернутая структурная схема, поясняющая работу процессора данных в режиме синтезирования:
- процессор данных - 54, включает в себя:
- устройство памяти - 61;
- вычислитель - 62;
- вычислитель - 63;
- устройство памяти - 64;
- умножитель - 65;
- вычислитель данных и управления - 66;
- вычислитель радиального ускорения - 67;
- вычислитель радиальной скорости - 68;
- инерциальная навигационная система - 69;
- устройство памяти - 70;
- вычислитель - 71;
- вычислитель - 72;
- устройство памяти - 73;
- умножитель - 74;
- устройство памяти - 75;
- вычислитель - 76;
- вычислитель - 77;
- устройство памяти - 78,
- умножитель - 79;
- умножитель - 80;
- умножитель - 81;
- умножитель - 82;
- умножитель - 83;
- умножитель - 84;
- умножитель - 85;
- умножитель - 86;
- сумматор - 87;
- умножитель - 88;
- устройство sin - 89;
- устройство cos - 90;
- устройство sin - 91;
- устройство cos - 92;
- устройство sin - 93;
- устройство cos - 94;
- устройство sin - 95;
- устройство cos - 96;
- устройство памяти - 97;
- устройство памяти - 98;
- устройство памяти - 99;
- устройство памяти - 100;
- устройство памяти - 101;
- устройство памяти - 102;
- устройство памяти - 103;
- устройство памяти - 104;
- вычислитель корректирующих функций - 105, его образуют элементы 61-82, 84-86, 89-94, 97-102.
6) На фиг.6 в качестве примера приведена графическая зависимость ошибок измерения ускорения датчиком во времени на интервале синтезирования.
Бортовая радиолокационная система с синтезированной апертурой антенны для летательных аппаратов состоит из антенны 1, циркулятора 2, передатчика 3, приемника 6, задающего генератора 4, синтезатора частот-синхронизатора 5, процессора данных 46, процессора сигналов 13, индикатора 32, инерциально-навигационной системы 61, трех датчиков измерения линейных ускорений 55, 57, 60 с аналого-цифровыми преобразователями 56, 58, 59. При этом для передачи излучающего импульса в антенну 1 выход передатчика 3 через циркулятор 2 соединен с входом антенны 1, для передачи принятого антенной 1 отраженного сигнала выход антенны 1 через циркулятор 2 соединен с первым входом приемника, для формирования излучающего СВЧ сигнала несущей частоты "f" первый вход передатчика соединен с первым выходом синтезатора частот-синхронизатора 5, для запуска передатчика 3 его второй вход соединен с вторым выходом синтезатора частот-синхронизатора 5 по сигналу частоты повторения импульсов Fп.
Работу БРЛС в когерентном режиме обеспечивает задающий генератор 4, частота которого "fг" является базовой и используется в синтезаторе для формирования сигнала излучения "f", а также гетеродинного и других сигналов, синхронизирующих работу блоков и процессоров. Все высокочастотные сигналы формируются в синтезаторе частот-синхронизаторе 5 путем умножения частоты задающего генератора, а низкочастотные синхронизирующие сигналы путем деления частоты "fг". Для формирования в приемнике 6 промежуточной частоты принимаемого сигнала "fпр" третий выход синтезатора частот-синхронизатора 5 по сигналу гетеродинной частоты fc соединен со вторым входом приемника 6.
Для формирования частоты приемного сигнала в диапазоне доплеровских частот "fд" четвертый выход синтезатора частот-синхронизатора 5 по сигналу промежуточной частоты "fпр" соединен с третьим входом приемника 6.
Для формирования частоты дискретизации аналого-цифрового преобразователя (АЦП) в приемнике 6 пятый выход синтезатора частот-синхронизатора по сигналу опорной частоты "fca" соединен с четвертым входом приемника 6.
Для обработки радиолокационной информации, выход приемника 6 соединен с первым входом цифрового процессора сигналов 13. (Для передачи сигналов из приемника 6 в цифровой процессор сигналов 13 применяется 2×16 разрядная линия). Для синхронизации работы процессора сигналов 13 шестой выход синтезатора частот-синхронизатора 5 по сигналу тактовой частоты fсп соединен со вторым входом цифрового процессора сигналов 13. Для синхронизации работы процессора данных 54 седьмой выход синтезатора частот-синхронизатора 5 по сигналу fnd соединен с первым входом цифрового процессора данных 54.
Для управления режимами работы и выдачи исходных параметров, первый выход цифрового процессора данных 54 соединен с третьим входом цифрового процессора сигналов 13. (Для передачи сигналов из цифрового процессора данных 54 в цифровой процессор сигналов 13 применяется стандартный магистральный параллельный интерфейс (МПИ) ГОСТ 26765.51-86).
Для управления режимами работы синтезатора частот синхронизатора 5 его второй вход соединен со вторым выходом процессора данных 54. Для выдачи обработанной радиолокационной информации выход цифрового процессора сигналов 13 соединен со входом индикатора 13.
Для вычисления опорной функции относительно фазового центра антенны для компенсации фазовых изменений сигнала пятый вход процессора данных 54 по сигналам составляющих скорости носителя Vx, Vy, Vz соединен с инерциальной навигационной системой 69. В БРЛС введены три датчика измерения ускорений с аналого-цифровыми преобразователями, размещенными на платформе антенны 1 вблизи ее фазового центра по осям OX, OY и OZ для вычисления фазовых коэффициентов опорной и корректирующей функций. При этом первый, второй и третий выходы первого, второго и третьего датчиков измерения ускорений через аналого-цифровые преобразователи соединены соответственно с третьим, четвертым и пятым входами процессора данных 54 (линии а, в, с на фиг.2).
Для работы аналого-цифровых преобразователей 56, 58, 59 датчиков ускорений 55, 57 и 60 на второй вход каждого АЦП поступает по линии "d" (фиг.2) сигнал частоты дискретизации "fd" из синтезатора частот-синхронизатора 5.
С целью существенного уменьшения влияния ошибок датчиков измерения линейных ускорений в процессор сигналов 13 введен вычислитель 106 выбора точечной цели и номера корректирующей функции, а в процессор данных введен вычислитель 105 корректирующих функций, при этом выход вычислителя корректирующих функций процессора данных 54 соединен с третьим входом процессора сигналов 13 (по МПИ ГОСТ 26765.51).
Бортовая радиолокационная система работает следующим образом.
В процессе движения носителя антенны 1 передатчик 3 усиливает и осуществляет модуляцию высокочастотного сигнала "f", поступающего из синтезатора частот-синхронизатора 5, и формирует импульсы, имеющие заданную длительность τи и период повторения Тп, определяемые однозначной дальностью. Сформированные в передатчике 3 СВЧ импульсы через циркулятор 2 передаются в антенну 1.
Антенной 1 эти импульсы излучаются в пространство и распространяются в направлении выбранной области.
Когерентность сигнала определяется задающим высокостабильным по частоте задающим генератором 4. Высокочастотный сигнал f и синхронизирующие импульсы формируются синтезатором частоты-синхронизатором 5, разработанным известными методами проектирования и изготовленным с использованием известной элементной базы.
От задающего генератора 4 входная частота "fг" поступает в синтезатор частот-синхронизатор 5, умножается до более высокой частоты и используется в качестве несущей частоты радиолокационного сигнала, излучаемого антенной, а также гетеродинного и синхронизирующих сигналов. Кроме того, путем деления частоты fг формируются синхронизирующие и запускающие импульсы. В процессе движения носителя отраженные от поверхности объектов сигналы принимаются антенной и через циркулятор 2 поступают в приемник 6. В СВЧ приемнике 7 (см. фиг.3) этот сигнал в смесителе приемника смешивается с сигналом синтезатора частот-синхронизатора 5 "fc", в результате чего образуется сигнал промежуточной частоты "fпр". Сигнал промежуточной частоты в усилителе промежуточной частоты УПЧ 8 усиливается и поступает на синхронные детекторы 9 и 10, на которые от синтезатора поступает сигнал с частотой, равной промежуточной частоте fпр. Причем на один из фазовых детекторов сигнал синтезатора fпр поступает со сдвигом на π/2.
За счет движения антенны 1 на выходах фазовых детекторов образуются синфазный "I" и квадратурный "Q" сигналы доплеровской частоты. Далее оба сигнала "I" и "Q" с помощью аналого-цифрового преобразователя 11 и 12, тактируемого с помощью синхросигнала "fca", из синтезатора частот-синхронизатора 5, накапливаются в памяти 14 и 15 для каждого элемента дальности и каждого периода повторения.
В предлагаемой БРЛС компенсация фазовых набегов сигналов производится двумя этапами (см. фиг.5). На первом этапе с помощью опорной функции компенсируются максимальные набеги фазы сигналов, связанные с наличием ускорения.
На втором этапе с помощью корректирующей функции компенсируются фазовые набеги, связанные с ошибками измерения датчиками линейного ускорения.
На первом этапе в процессоре данных 54 синхронизируемым сигналом "fпd" синтезатора частот-синхронизатора 5, формируются коэффициенты опорной функции, которая комплексно сопряжена с сигналом, отраженным от объекта в соответствии с формулой (1).
Для этого формируется линейный член изменения фазы "Δϕл" опорной функции и ее квадратичный член "Δϕкв" (см. формулу (1)).
Для формирования линейного члена из вычислителя 66 данных  и управления на один из входов умножителя 83 поступает коэффициент и его умножают на значение радиальной скорости Vr, поступающее на другой вход из вычислителя 68, где оно рассчитывается по формуле (2) для каждого элемента дальности "n" и "к"-го периода повторения на основе измеряемых инерциальной навигационной системой (ИНС) составляющих скорости Vx, Vy, Vz и поступающих из вычислителя 66 данных и управления углов αi и εi. На выходе умножителя 83 будет:
и управления на один из входов умножителя 83 поступает коэффициент и его умножают на значение радиальной скорости Vr, поступающее на другой вход из вычислителя 68, где оно рассчитывается по формуле (2) для каждого элемента дальности "n" и "к"-го периода повторения на основе измеряемых инерциальной навигационной системой (ИНС) составляющих скорости Vx, Vy, Vz и поступающих из вычислителя 66 данных и управления углов αi и εi. На выходе умножителя 83 будет:
 где k - номер периода повторения "Тп"
где k - номер периода повторения "Тп"
Для формирования квадратичного члена из вычислителя 66 данных и управления на умножитель 88 поступает коэффициент  и умножается на значение аr, поступающее из вычислителя 67 радиального ускорения. Величина радиального ускорения "аr" вычисляется в вычислителе 67 по формуле (3). Значения углов "α" и "ε" для вычисления поступают из вычислителя 66 данных и управления.
и умножается на значение аr, поступающее из вычислителя 67 радиального ускорения. Величина радиального ускорения "аr" вычисляется в вычислителе 67 по формуле (3). Значения углов "α" и "ε" для вычисления поступают из вычислителя 66 данных и управления.
Результатом умножения аr на коэффициент b является квадратичный член опорной функции  который поступает на сумматор 87, где суммируется с линейным членом для каждого элемента дальности "n" для каждого периода повторения Тп.С выхода сумматора 87 изменения фазы опорной функции
который поступает на сумматор 87, где суммируется с линейным членом для каждого элемента дальности "n" для каждого периода повторения Тп.С выхода сумматора 87 изменения фазы опорной функции  для каждого элемента дальности и каждого периода повторения "Тп" поступают в устройства sin и cos 95 и 96, которые вычисляют фазовые коэффициенты компенсации, затем они накапливаются в устройствах памяти 103, 104.
для каждого элемента дальности и каждого периода повторения "Тп" поступают в устройства sin и cos 95 и 96, которые вычисляют фазовые коэффициенты компенсации, затем они накапливаются в устройствах памяти 103, 104.
По мере вычисления фазовых коэффициентов их значения из устройств памяти 103, 104 поступают по линиям 1031 и 1041 в устройство памяти 49 и 50 процессора сигналов 13.
Для второго этапа компенсации фазовых набегов в процессор данных вводится вычислитель 105 корректирующих функций hnx; hny и hnz (см. фиг.5). При этом первый, второй, третий, четвертый, пятый, шестой и седьмой входы вычислителя соединены соответственно с первым, вторым, третьим, четвертым, пятым, шестым и седьмым выходами вычислителя данных и управления 66. Восьмой, девятый и десятый входы соединены соответственно с выходами АЦП 56, 58 и 59 датчиков линейных ускорений 55, 57 и 60. Выходы вычислителя корректирующих функций по линиям 971, 981, 991, 1001, 1011 и 1021 соединены с соответствующими входами процессора сигналов (см. фиг.4).
В связи с тем, что связь между процессором данных 54 и процессором сигналов 13 осуществляется по стандартному интерфейсу, на фиг.2 и в формуле приведенные выше связи на фиг.4 и 5 показаны как выход 1.
Для второго этапа компенсации фазовых набегов, связанных с ошибками измерения ускорений, фазовые коэффициенты корректирующей функции рассчитываются на основе измерений датчиком линейных ускорений (ДЛУ). При этом формирование фазовых коэффициентов корректирующих функций hnx, hny и hnz (формулы 17, 18, 19) рассматривается на примере формирования функции hnx при измерении ускорений по оси "ОХ". Формирование по другим осям (OY и OZ) будет аналогичным.
Измеренное ДЛУ значение ускорения через аналого-цифровой преобразователь (АЦП) поступает на умножитель 65 вычислителя корректирующих функций 105, на который из вычислителя 66 данных и управления поступает значение коэффициента "ξ", определяющее величину возможной максимальной ошибки датчика (см. фиг.5).
В умножителе 65 определяются максимальные значения ошибок измерения ускорения датчиком во времени, соответствующем k-му периоду повторения на интервале времени синтезирования. Эти значения ошибок через память 64 поступают в вычислитель 63, который определяет максимальное количество корректирующих функций "2nmax". Для этого из вычислителя исходных данных и управления 66 в вычислитель 63 поступает величина допустимого значения ошибки "daдоп", определяемого по формуле (11). В вычислителе 62 производится вычисление ошибок измерения ускорений "dax" для "2nmax" корректирующих функций по формуле (13) для каждого временного отсчета.
Для этого из вычислителя данных и управления 66 для каждого временного отсчета в вычислитель 62 поступает величина "n", соответствующая количеству корректирующих функций n÷nmax и -n÷-nmax. Кроме того, из вычислителя 63 поступает значение "nmax", а из памяти 64 поступает значение ошибки измерения ускорения "da" для каждого временного отсчета. Полученные значения "2nmax" ошибок "dax" по оси ОХ в умножителе 80 пересчитываются на радиальное направление по формуле 14. Для этого в умножитель 80 из вычислителя 66 данных и управления поступает произведение косинусов углов азимута и места. Полученные значения ошибок "darx" для каждой корректирующей функции поступают в умножитель для вычисления фазовых поправок на интервале времени "k·Тп". Для этого в вычислитель 84 из вычислителя 66 данных и управления для каждого значения корректирующей функции "hnx" поступают значения коэффициентов (см. фиг.5). Из умножителя 84 значения фазовых поправок для "2nmax" значений корректирующих функций поступают в устройства sin и cos 89 и 90 соответственно для получения фазовых коэффициентов для двух квадратур сигналов.
Далее сигналы поступают в устройства памяти 97 и 98. Из устройств памяти 97 и 98 процессора данных 54 фазовые коэффициенты корректирующих функций из вычислителя 105 корректирующих функций по линиям 971 и 981 поступают в устройства памяти 43 и 46 процессора сигналов 13.
Канал формирования корректирующих функций "hny", состоящий из узлов 74,73, 72, 71, 70, 81, 85, 91, 92, 99 и 100 и канал "hnz", состоящий из узлов 79, 78, 77, 76, 75, 82, 86, 93, 94, 101 и 102 аналогичны каналу "hnx". При этом фазовые коэффициенты корректирующих функций "hny" и "hnz" по линиям 991, 1001 и 1011, 1021 из вычислителя 105 корректирующих функций поступают соответственно в устройства памяти 44, 47 и 45, 48 процессора сигналов 13.
На первом этапе компенсации, в режиме картографирования, по окончании набора массива РЛИ, поступающие из памяти (14 и 15) отсчеты сигнала каждого элемента дальности, каждого периода повторения через коммутаторы 16 и 17 (при отсутствии сигнала j) поступают в умножители 18, 19, 20, 21, где перемножаются с одноименными отсчетами каждого элемента дальности и периода повторения фазовых коэффициентов опорной функции, поступающих из устройств памяти 49 и 50 через коммутаторы 38 и 39 (при отсутствии сигнала j). Этим достигается начальная компенсация фазовых набегов, вызванных ускорениями носителя, которые измеряются датчиками ДЛУ 55, 57 и 60. После умножения сигналов с выходов устройств разности 22 и суммы 23 отсчеты сигналов двух квадратур поступают в устройства памяти 24 и 25 для каждого элемента дальности для каждого периода повторения. По окончании набора массива РЛИ отсчеты сигналов из устройств памяти 24, 25 поступают в процессор БПФ 26, где подвергаются гармоническому анализу по алгоритму быстрого преобразования Фурье.
Результатом преобразования сигналов из временной области в частотную являются частотные (азимутальные) отсчеты двух квадратур радиолокационной информации в каждом элементе дальности. Затем отсчеты двух квадратур поступают на узел 27, где из них формируется модуль. Для обеспечения режима компенсации на втором этапе в процессор сигналов 13 введен вычислитель 106 выбора точечной цели и определения номера корректирующей функции. При этом вход вычислителя 106 по сигналам отражений соединен с выходом узла модуля 27 процессора сигналов 13, а первый выход вычислителя по сигналу "j" соединен со входами коммутаторов 16, 17, 28, 38 и 39 процессора сигналов 13.
Выходы устройства управления вычислителя 106 - по сигналам X°; Y°; Z°; X1, Y1; Z1; nx; ny; nz поступают на входы с соответствующими названиями в устройства управления 51, 52 и 53 процессора сигналов. Для выбора точечной цели отсчеты сигналов для каждого элемента дальности для каждого азимутального отсчета из узла 27 процессора сигналов 13 поступают через коммутатор 30 (при отсутствии сигнала j) в устройство памяти 31, затем сигналы из устройств памяти поступают на пороговое устройство 33.
В пороговом устройстве формируется порог для каждого элемента дальности в соответствии с формулой:
 где:
где:
где:
l - номер азимутального отсчета,
Lmax - максимальный номер азимутального отсчета,
Uфк1 - амплитуда 1-го азимутального отсчета.
После сравнения сигналов с порогом с выхода порогового устройства 33 сигналы, превышающие уровень порога более чем на N дБ, поступают в устройство памяти 35, а из него отсчеты сигналов последовательно поступают в устройство 37 оценки параметров ширины РЛИ по азимуту, где по количеству азимутальных отсчетов "m" определяется ширина сигнала по уровню 3 дБ от максимального значения (Umax). В этом устройстве величина ширины каждого последующего сигнала сравнивается с предыдущим и при mпослед.>mпредыд. записывается в память для дальнейшего сравнения, а предыдущий отсчет исключается из рассмотрения. При mпослед.>mпредыдущ. исключается последующий. После такой сравнительной оценки всех сигналов определяется сигнал с минимальной шириной "mmin" и фиксируется его номер по дальности "α", номер отсчета по азимуту "α" и он подается в устройство формирования сигналов переключения 42, где формируются сигналы переключения "j", номер адреса дальности "nd" и номер азимута "la".
Сигнал переключения "j" поступает на коммутаторы 16, 17, 28, 30, 38 и 39, номер дальности "nd" поступает в устройство управления адреса 40, а номер азимута "lа" поступает в вычислитель контрастности 32.
При поступлении сигнала "j" на коммутаторы 16 и 17 от умножителей 18, 19, 20 и 21 отключают устройства памяти 14 и 15 и подключают устройства памяти 24 и 25. При подаче сигнала "j" на коммутаторы 38 и 39 от умножителей 18, 19, 20 и 21 отключают устройства памяти 49 и 50 со значениями фазовых коэффициентов опорной функции и подключают устройства памяти 43, 44, 45, 46, 47 и 48 со значениями фазовых коэффициентов корректирующих функций.
Из устройства управления адреса 40 в устройства памяти 24 и 25 подается номер адреса дальности "nd". При этом отсчеты массива сигналов в элементе дальности с номером "nd" для каждого периода повторения из памяти 24 и 25 через коммутаторы 16 и 17 поступают на умножители 18, 19, 20, 21, где перемножаются с фазовыми коэффициентами корректирующих функций, учитывающих ускорения по оси X, которые поступают из устройств памяти 43 и 46 для двух квадратур сигнала.
Для подключения устройств памяти 43 и 46 к умножителям в устройство 51 управления адреса по сигналу "j" из устройства управления 41 поступает сигнал "X°". Результат умножения в устройствах 18, 19, 20 и 21 с выходов устройств разности 22 и суммы 23 подается в устройства памяти 24, 25 и далее в процессор БПФ 26, где подвергается гармоническому анализу по алгоритму быстрого преобразования Фурье. Затем отсчеты двух квадратур поступают на узел 27, где из них формируется модуль.
Далее сигналы каждого азимутального отсчета в элементе дальности с номером "nd" поступают в вычислитель 106 для определения номера корректирующей функции. Через коммутатор 30, коммутируемый сигналом "j", сигналы РЛИ поступают в вычислитель 32, где в соответствии с формулой [5] вычисляется контрастность "С" для сигнала с азимутальным номером "lа". Далее значение контрастности "С" поступает в память 34.
При этом цикл обработки массива сигналов повторяется 2nmaxx·k раз, что соответствует количеству корректирующих функций hx (по оси ОХ) и количеству периодов Тп. Далее из памяти 34 значения контрастности (для каждой корректирующей функции) поступают в вычислитель 36, где определяется номер nx корректирующей функции "hnx", соответствующий максимуму контрастности "Сmax" для азимутального отсчета "la", после чего номер "nх" корректирующей функции hnx поступает в устройство управления 41. Из устройства управления 41 сигнал "nх" поступает в устройство управления адреса 51, по сигналам которого в устройствах памяти 43 и 46 запоминаются коэффициенты корректирующей функции "hnx", обеспечившие наилучшую компенсацию фазовых изменений массива сигнала отражений в элементе дальности "nd", при которой реализуется максимальная контрастность "Cmax х".
Из устройства управления сигнал "nх" также поступает в узел управления адреса 40, с помощью которого в устройствах памяти 24, 25 фиксируется массив сигналов отражений в элементе дальности "nd", в котором за счет компенсации фазовых изменений сигнала с помощью корректирующей функции "hnx" получена максимальная контрастность "Сmax".
При поступлении сигнала "nх" из вычислителя 36 в устройство управления 41, т.е. по окончании цикла умножений на корректирующие фазовые коэффициенты с параметрами ускорения по оси "ОХ", в устройстве управления 41 снимается сигнал "X°" и формируется сигнал "Y°", который поступает в устройство управления адреса 52, управляющий устройствами памяти 44, 47 по выдаче коэффициентов корректирующей функции с параметрами ускорений по оси "OY" в умножители 18, 19, 20, 21 в циклах ее умножения на массив сигналов отражений в элементе дальности "nd".
Задачей "nmax·k" циклов операций при использовании параметров ускорений по оси "OY" является нахождение корректирующей функции "hny", (аналогично нахождению "hnx"), при умножении на которую массива сигналов отражений обеспечивается наилучшая компенсация фазовых набегов сигнала, дающая максимальную контрастность Сmaxy для азимутального отсчета "lа".
При этом обработке подвергается массив сигналов в элементе дальности "nd", уже прошедший обработку по корректирующей функции "hnx" с номером "nх". Процедура обработки аналогична, как и по сигналу "X°".
По окончании цикла обработки по сигналу "Y°", в результате которого в вычислителе 36 при нахождении максимальной контрастности "Сmax" определяется номер корректирующей функции "hny", в устройстве управления 41 по сигналу номера nу снимается сигнал "Y°" и формируется сигнал "Z°", который поступает в устройство управления адреса 53 и формирует сигналы управления устройствами памяти 45 и 48 по передаче фазовых коэффициентов корректирующих функций "hnz" в умножители 18, 19, 20 и 21 в циклах умножения на массив сигналов отражений. В качестве массива сигналов отражений для обработки также принимается массив сигналов в устройства памяти 24 25 в элементе дальности "nd", уже прошедший обработку по сигналам "X°" и "Y°". Операция обработки массива сигналов по нахождению корректирующей функции по сигналу "Z°" аналогична операции обработки по сигналам "X°" и "Y°". В результате трех циклов операций по сигналам "X°", "Y°" и "Z°" определяются и запоминаются в устройствах памяти 43, 44, 45, 46, 47, 48 фазовые коэффициенты трех корректирующих функций "hnx", "hny" и "hnz", при применении которых в качестве функций компенсации набегов фазы массива сигналов обеспечивается получение максимальной контрастности Сmax сигнала.
По окончании последнего цикла операций, по сигналу "nz", поступающему из вычислителя 36 в устройство управления 41, из устройства управления 41 в устройство формирования сигналов 42 поступает сигнал "ρ", который снимает сигнал "nd", подаваемый в устройство управления 40. Устройство управления 40 снимает в устройствах памяти 24 и 25 адрес "nd".
Одновременно из устройства управления 41 в узел адреса 51 поступает сигнал "X1", по которому из устройств памяти 43, 46 через коммутаторы 38 и 39 на умножители 18, 19, 20, 21 с заданным тактом поступают фазовые коэффициенты найденной ранее корректирующей функции "hnx".
С этого момента начинается второй этап компенсации фазовых набегов сигналов всего массива, связанных с ошибками измерения ускорений. Для каждого элемента дальности и каждого периода повторения из устройств памяти 24, 25 на эти умножители с заданным тактом также поступают отсчеты массива сигналов для каждого элемента дальности и каждого периода повторения. При этом, при отсутствии сигнала адреса "nd", в умножителях 18, 19, 20 и 21 производится последовательное умножение всего массива отсчетов сигналов для каждого элемента дальности для заданного размера карты. Полученные после перемножения значения отсчетов массива сигналов снова записываются в этих же устройствах памяти 24 и 25. Таким образом, производится компенсация фазовых изменений всего массива сигналов заданного размера карты при воздействии ускорений по оси "ОХ". По окончании первого цикла компенсации снимается сигнал "X1" и в устройстве управления 41 формируется и выдается в устройство управления адреса 52 сигнал "Y1". По сигналу "Y1" повторяется цикл обработки всего массива сигналов в устройствах памяти 24 и 25, откорректированного по сигналу "X1" при его умножении на коэффициенты найденной ранее корректирующей функции "hny" с номером "ny". По окончании коррекции по сигналу "Y1" в устройстве управления 40 снимается сигнал "Y1" и формируется сигнал "Z1".
По сигналу "Z1", поступающему из устройства управления 41 в устройство управления адреса 53 из устройств памяти 45 и 48 через коммутаторы 38 и 39 на умножители 18, 19, 20 и 21 поступают фазовые коэффициенты корректирующей функции "hnz" с номером "nz". На эти умножители из устройств памяти 24 и 25 поступает массив сигналов с каждого элемента дальности уже откорректированный флуктуациями "hnx" и "hny". В результате умножения производится операция по компенсации фазовых набегов сигнала за счет ускорений по оси "OZ". Эти операции повторяются для каждого элемента дальности заданного размера карты.
В результате трех циклов операций производится компенсация фазовых изменений всего массива сигналов заданного размера карты за счет воздействия ошибок ускорений датчиками по трем осям OX, OY и OZ, и который в откорректированном виде размещается в памяти 24 и 25.
Следует отметить, что компенсация фазовых изменений проведена с заранее задаваемой допустимой величиной остаточного фазового набега, при котором обеспечивается требуемая характеристика качества карты (контрастность, разрешение и др.). По окончании цикла операций с массивом сигналов заданного размера карты в устройстве 41 снимается сигнал "Z1". По снятию сигнала Z1 в устройстве управления 41 формируется сигнал снятия режима корректировок "В", который подается в устройство формирования сигналов переключения 42, по которому снимаются команды "lа" и "j". При этом коммутаторы 16, 17, 38, 39, 30 и 28 устанавливаются в начальное положение, в котором были перед началом корректировок. После снятия сигнала "j" включается режим быстрого преобразования Фурье (БПФ), который преобразует откорректированный массив сигналов всей карты, находящийся в устройствах памяти 24 и 25 из временной области в частотную.
Затем частотные (азимутальные) отсчеты двух квадратур поступают на устройство модуля 27, где из них формируется модуль, далее через коммутатор 28 (при отсутствии сигнала j) сигналы для каждого элемента дальности для каждого азимутального отсчета поступают на индикатор 29.
Техническим результатом в предложенной БРЛС является снижение влияния (по предварительным оценкам более чем на порядок) ошибок измерения ускорения, приводящее к существенному улучшению характеристик радиолокационного изображения (разрешение, контрастность, динамический диапазон и др.).
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2194288C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2151407C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2531255C1 |
| Бортовая радиолокационная станция | 2019 |
|
RU2719547C1 |
| Бортовая радиолокационная станция | 2016 |
|
RU2609156C1 |
| Способ формирования радиолокационного изображения земной поверхности бортовой радиолокационной станцией | 2019 |
|
RU2717256C1 |
| Способ формирования радиолокационного изображения земной поверхности бортовой радиолокационной станцией | 2023 |
|
RU2806651C1 |
| Устройство для определения параметров движения наземных объектов в двухпозиционной системе бортовых малогабаритных РЛС | 2021 |
|
RU2760873C1 |
| Способ построения радиолокационного изображения с помощью радиолокационной станции с синтезированной апертурой | 2017 |
|
RU2661941C1 |
Изобретение относится к радиолокационным системам и предназначено для использования в качестве вертолетной или самолетной БРЛС для обзора земной или водной поверхности и обнаружения на ней объектов в режимах радиолокационного картографирования. Техническим результатом является снижение ошибок измерения ускорения, приводящее к существенному повышению характеристик радиолокационного изображения (разрешение, контрастность, динамический диапазон и др.). Для компенсации фазовых набегов при синтезировании используется информация о параметрах движения антенны, полученная инерциальной навигационной системой и датчиками линейных ускорений, при этом применяется процедура обработки сигналов отражений от наземных объектов, при которой величина фазовых набегов за счет ошибок измерения датчиками доводится до допустимой величины, определяемой заданным критерием качества радиолокационной информации. 2 н.п.ф-лы, 6 ил.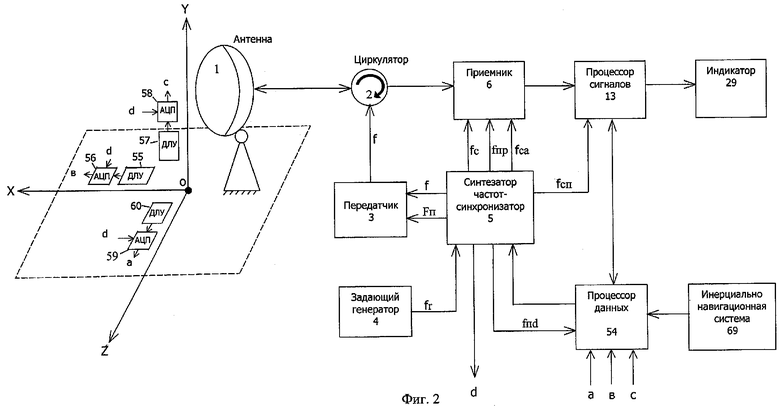
составляющие скорости движения Vx; Vy; Vz летательного аппарата,
составляющие линейного ускорения ax; ау; az летательного аппарата, замеренные, соответственно, инерциальной навигационной системой и датчиками линейных ускорений,
и на основе этих измерений, определяют радиальную составляющую скорости Vr в направлении на объект, определяют комплексно сопряженную с сигналом опорную функцию компенсации фазовых набегов сигналов, отраженных от наземных объектов

где H(t) - весовая функция;
Vr - составляющая скорости движения фазового центра антенны в направлении на наземный объект;
аr - составляющая ускорения движения фазового центра антенны в направлении на наземный объект;
τ - интервал времени;
t - время,
умножают опорную функцию на массив принятых отраженных сигналов от наземных объектов на интервале синтезирования,
отличающийся тем, что компенсацию фазовых набегов сигнала проводят двумя этапами: полученный на первом этапе после умножения на опорную функцию массив сигналов на втором этапе умножают на комплексно сопряженные с сигналом корректирующие функции hnX;Y;Zп0 координатам X, Y, Z, при этом корректирующие функции определяют по критерию оценки качества радиолокационной информации на основе ошибок измерения ускорения датчиками.
где h - ошибка корректирующей функции;
dar - ошибка измерения линейного ускорения датчиком.
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2151407C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2194288C2 |
| Схват манипулятора | 1987 |
|
SU1426785A1 |
| US 6175326 А, 16.01.2001 | |||
| US 5160932 А, 03.11.1992. | |||

