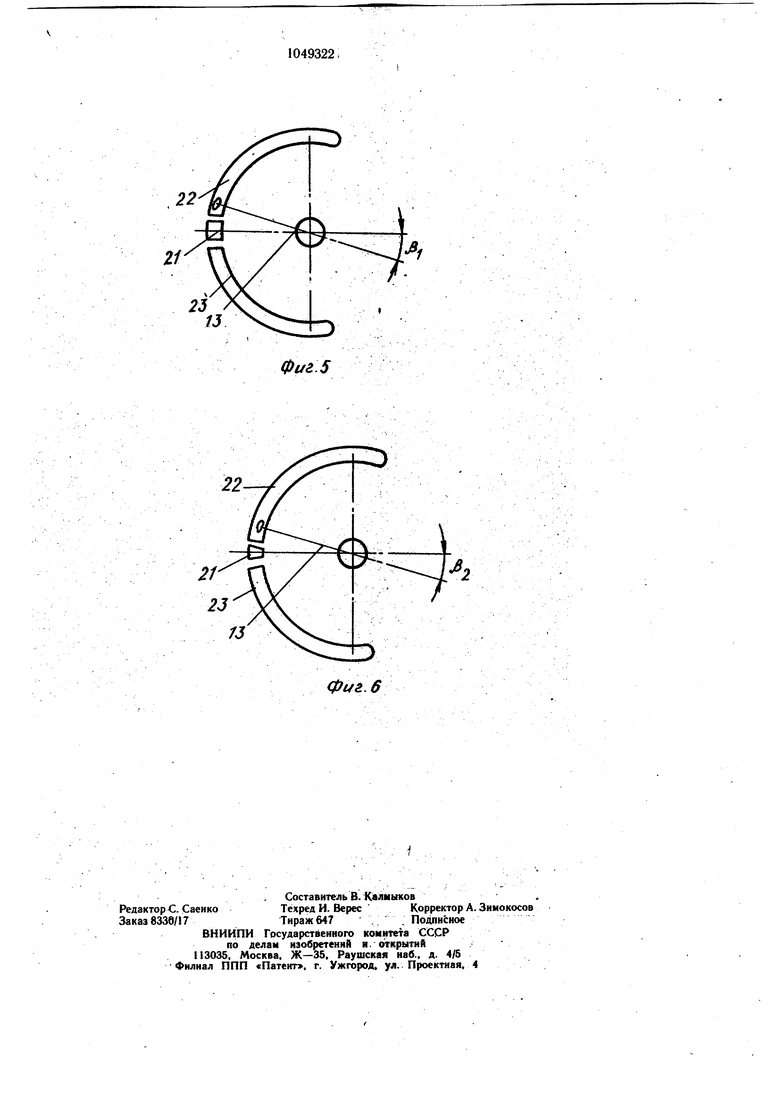
Изобретение относится к под емно-транспортному машиностроению и предназначено для перевозки крупногабаритных длинномерных грузов. Известно устройство управления колесами прицепа транспортного средства, имеющего заднюю и переднюю тележки, шарнирно связанные между собой грузовой рамой, содержащее датчики углов рассогласования, установленные на каждой тележке, подвижные контакты которых механически связаны с шарниром, а неподвижные - с системой управления приводом поворота колес задней тележки, при этом датчики выполнены в виде регулируемых сопротивлений, а система управления - в виде потенциометрического моста, включенного в цепь .управления механического устройства (храповиккопир), воздействующего на привод поворота колес. Задняя тележка стремится повер нуться на угол поворота передней тележки, так как происходит сравнение углов рассогласования 1. Однако устройство работает только на I криволинейном участке пути, на прямолинейном- цепь управления поворотом колес задней тележки разомкнута, а следовательно, устройство не обеспечивает выравниВание криволинейной траектории, возникающей из-за неровности дороги при -движении по прямой. Цель изобретения - улучшение маневренности путем повышения точности совме. щення продольных осей симметрии тележек при прямолинейном движении. Поставленная цель достигается тем, что в устройстве управления колесами прицепа транспортного средства, имеющем заднюю и переднюю тележки, шарнирно связанные между собой грузовой рамой, содержащем датчики угла рассогласования, установленные на каждой тележке, подвижные контакты которых механически связаны с шарниром, а неподвижные - с системой управления приводом поворота колес задней тележки, датчики угла рассогласования выполнены в виде трехпозиц1 онных переключателей, а система управления приводом поворота колес задней тележки выполнена в виде двух групп переключающих элементов, связывающих соответствующие крайние позиции неподвижных контактов трехпозиционных .переключателей с приводом поворота колес, и блокирующего элемента. связывающего позицию неподвижного контакта трехпозйционного переключателя передней тележки, соответствующую положению колес при прямолинейном движении транспортного средства, с подвижным контактом трехпозйционного переключателя задней тележки. На фиг. 1 изображено транспортное средство с устройством управления колесами прицепа, общий вид; на фиг. 2 схема передвижения транспортного средства; на фиг. 3 - опорно-поворотный шарнири датчик угла рассогласования, в аксонометрии; на фиг. 4 - функциональная схема устройства управления приводами поворота колес тележек; на фиг. 5 - неподвижный и подвижный контакты датчика передней тележки; на фиг. 6 - то же, датчика задней тележки. Устройство управления приводами поворота колес прицепа , установленное на транц портном средстве для перевозки длинномер ных грузов, включает переднюю I и заднюю 2 подкатные тележки, связанные транспортируемым грузом 3 через опорнб-поворотные шарниры 4 и 5. На задней тележке 2 может быть расположена кабина 6 для второго водителя, осуществляющего ручное управление приводами колес в случае поворота автопоезда на кривых с малыми радиусами и сложного профиля трассы. На каждой тележке установлен датчик угла рассогласования, на передней тележке - датчик 7, а на задней - датчик 8. Датчик, например 8, закрепляется на кронштейне 9, жестко соединенном с рамой-10 тележки 2. На раме 10 . неподвижно установлена ось И опорно-поворотного шарнира 5, на которую с возможностью вращения насажен оголовок 12, являющийся в данном случае поворотной частью шарнира 5. На оголовок 12 опирается транспортируемый груз 3. Каждый датчик 7 и 8 имеет подвижный контакт 13, через ось 14 связанный с приводным колесом 15 гибкой связи 16, и неподвижный контакт 17, закрепленный на корпусе 18 датчика. Ведущее колесо 19 гибкой связи закреплено на оголовке 12. На задней тележке 2 расположено устройство управления приводом 20 (ЭД) ее колеей Неподвижный контакт 17 каждого датчика 7 и 8 по электрической схеме связан с системой управления приводом колес задней тележки 2. Каждый датчик управляется поворотом той тележки, на которой он закреплен. Неподвижные контакты 17 разделены на три сектора: 21 центральный (фиг. 5 и 6), 22 для углов рассогласования положительного знака и 23 для углов рассогласования отрицательного знака. ПереклюЧающие элементы 24 - 29 соединены с датчиками 7 и 8 и с переключающими элементами 30 и 31. Устройство работает следующим образом. При нарушении соосности между тягачом и транспортным средством поворачиваются оголовки 12, поддерживающие груз,
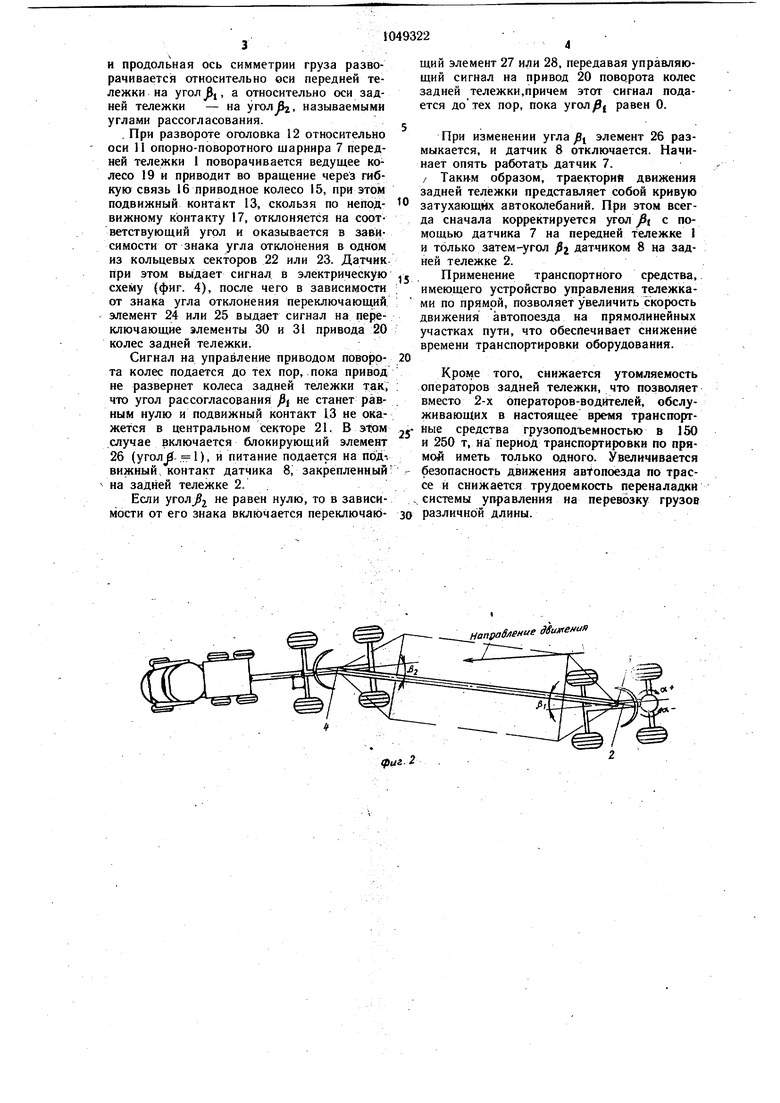
и продольная ось симметрии груза разворачивается относительно оси передней тележки на угол 1, а относительно оси задней тележки - на уголвд, называемыми углами рассогласования.
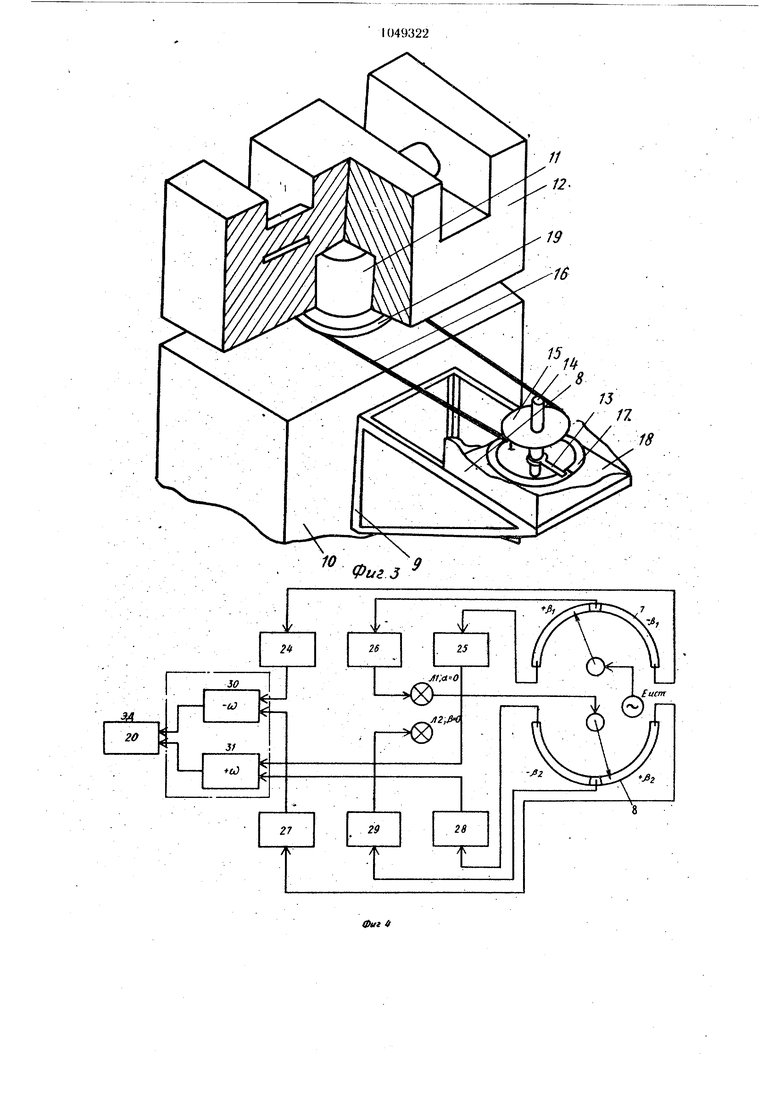
. При развороте оголовка 12 относительно оси И опорно-поворотного шарнира 7 передней тележки 1 поворачивается ведущее колесо 19 и приводит во вращение через гибкую связь 16 приводное колесо 15, при этом подвижный контакт 13, скользя по неподвижному контакту 17, отклоняется на соответствующий угол и оказывается в зависимости от знака угла отклонения в одном из кольцевых секторов 22 или 23. Датчик при этом выдает сигнал в электрическую схему (фиг. 4), после чего в зависимости от знака угла отклонения переключающий элемент 24 или 25 выдает сигнал на переключающие элементы 30 и 31 привода 20 колес задней тележки.
Сигнал на управление приводом поворрта колес подается до тех пор, пока привод не развернет колеса задней тележки так, что угол рассогласования fti не станет равным нулю и подвижный контакт 13 не окажется в центральном секторе 21. В этом случае включается блокирующий элемент 26 (уголи. 1), и питание подается на под-, вижныи контакт датчика 8; закрепленный на задней тележке 2.
Если не равен нулю, то в зависимости от его знака включается переключак)щий элемент 27 или 28, передавая управляющий сигнал на привод 20 поворота колес задней тележки,причем этот сигнал подается дотех пор, пока угол( равен 0.
При изменении угла fti элемент 26 размыкается, и датчик 8 отключается. Начинает опять работать датчик 7. / Таки-м образом, траекторий движения задней тележки представляет собой кривую затухающих автоколебаний. При этом всегда сначала корректируется угол( с помощью датчика 7 на передней тележке I и только затем-угол ft датчиком 8 на задней тележке 2.
Применение транспортного средства,
5 имеющего устройство управления тележка ми по прямой, позволяет увеличить скорость движения автопоезда на прямолинейных участках пути, что обеспечивает снижение времени транспортировки оборудования.
0
Кроме того, снижается утомляемость
операторов задней тележки, что позволяет вместо 2-х операторов-водителей, обслуживающих в настоящее транспорт5- ные средства грузоподъемностью в 150 и 250 т, на период транспортировки по прямой иметь только одного. Увеличивается - безопасность движения автопоезда по трассе и снижается трудоемкость переналадки ,. системы у1фавления на перевозку грузов
0 различной длины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Опорно-сцепное устройство тракторного транспортного поезда | 2023 |
|
RU2811756C1 |
| СЦЕПНОЕ УСТРОЙСТВО АВТОПОЕЗДА | 1994 |
|
RU2094282C1 |
| Опорно-поворотное устройство двухосного прицепа с переменным наклоном шкворня | 2021 |
|
RU2774087C1 |
| Стабилизирующее буксирное устройство одноосного прицепа с регулируемым наклоном шкворня | 2021 |
|
RU2771088C1 |
| Стабилизирующее тягово-сцепное устройство прицепа с переменным поперечным наклоном шкворня | 2022 |
|
RU2790298C1 |
| Стабилизирующее сцепное устройство одноосного прицепа | 2023 |
|
RU2811193C1 |
| Опорно-поворотное устройство двухосного прицепа | 2022 |
|
RU2792193C1 |
| Прицеп транспортного средства | 1988 |
|
SU1556988A1 |
| КОРОТКАЯ СЦЕПКА | 1995 |
|
RU2092370C1 |
| Устройство для управления колесами прицепа-роспуска | 1984 |
|
SU1194754A1 |
УСТРОЙСТВО УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПА ТРАНСПОРТНОГО СРЕДСТВА, имеющего заднюю и переднюю тележки, шарнирно связанные между собой грузовой рамой, содержащее датчики угла рассогласования, установ ленные на каждой тележке, подвижные контакты которых механически связаныс щарниром, а неподвижные - с системой . /// /// /// /// /// /// ///////// /// управления приводом поворота колес задней , отличающееся тем, что, с целью улучшения маневренности путем повышения точности совмещения продольных осей симметрии тележек при прямолинейном дви-( жении, датчики угла рассогласования выполнены в виде трехпозиционных переключателей, а система управления приводом поворота колес задней тележки выполнена в виде двух групп переключающих элементов, связывающих соответствующие крайние позиций неподвижных контактов трехпозиционных переключателей с приводом поворота колес, и блокирующего элемента, связывающего позицию неподвижного кон такта трехпозиционного -переключателя передней тележки, соответствующую положению колес при прямолинейном движенин транспортного средства, с подвижным кон(Л С тактом трехпозиционного переключателя задней тележки. Напрабление движения ; COf /// /// W- /// // у 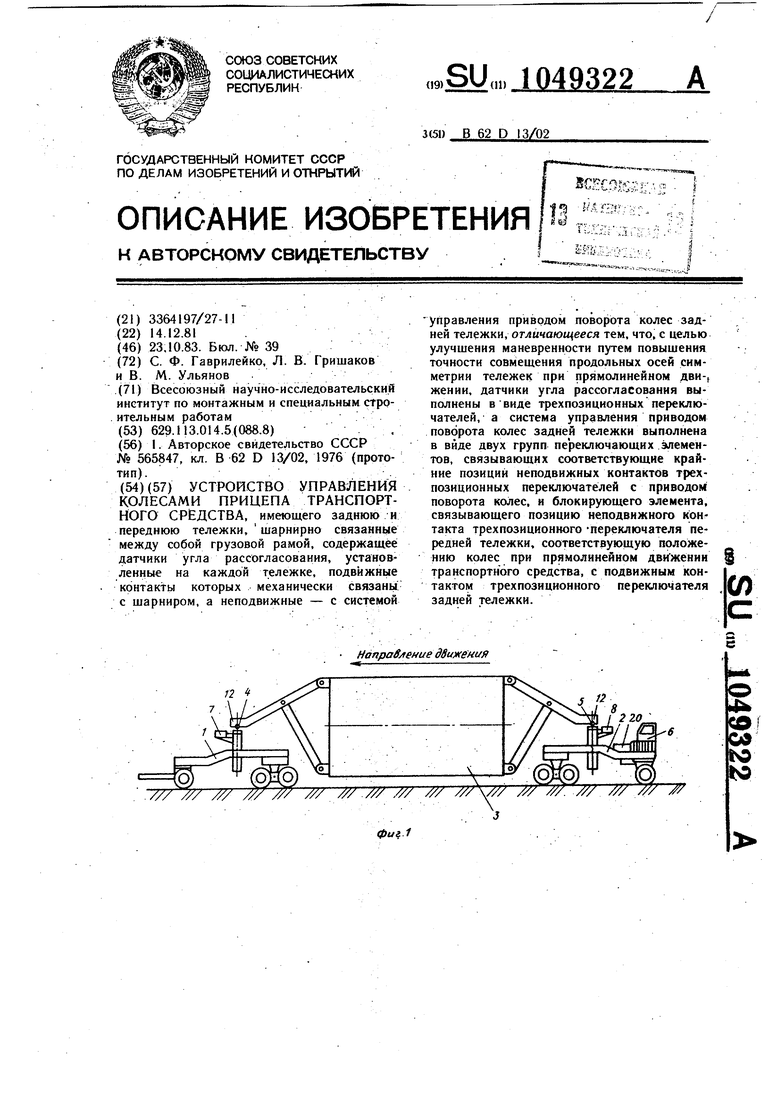
НапраЗмние ,
22
23
/J
фи&.б
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления колесами прицепа | 1976 |
|
SU565847A2 |
| кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
