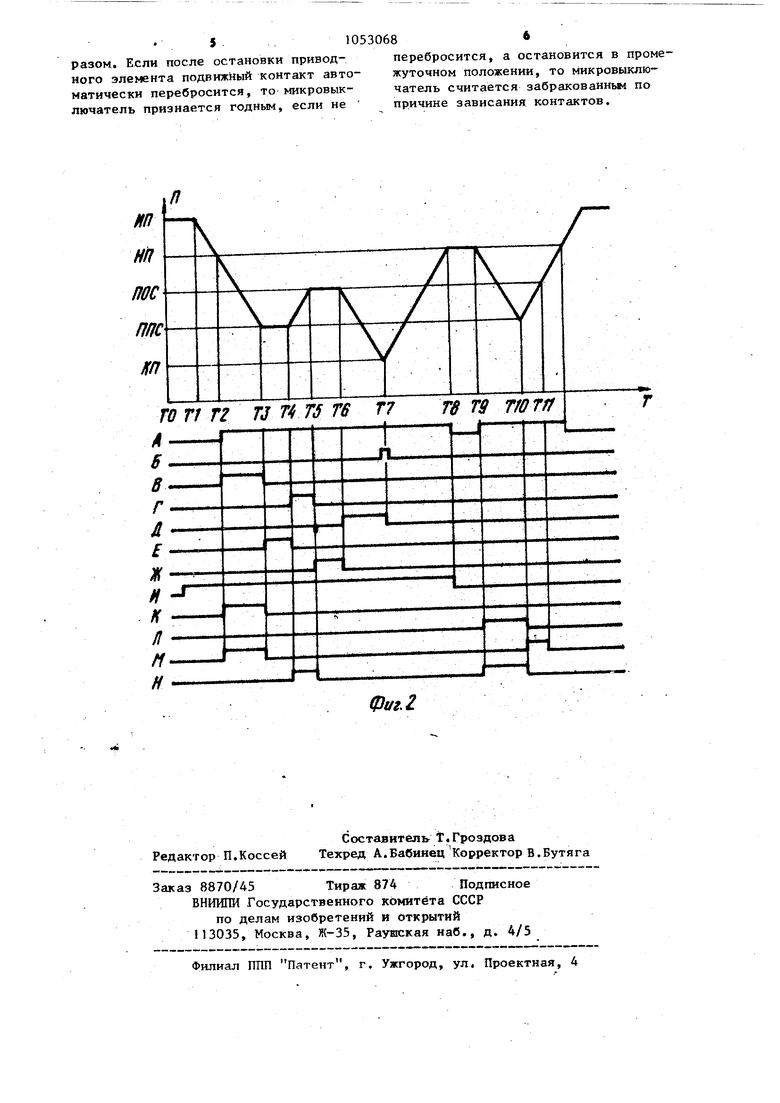
Изобретение относится к электротехнике и может быть использовано д контроля усилий, ходов и. отсутствия зависания контактов микровыключателей. Известно устройство для контроля перемещения ПJ ивoднoгo элемента мик ; ровыключателя, содержащее электродв гатель, преобразователь вращательного движения в поступательное, кон цевйе выключатели, датчик нулевого отсчета, датчик предельного усилия, счетчики, .чатчик перемещения, поляризованное реле, ключи управления и реле управления ij . Однако это устройство не контролирует усилия срабатьшаний и отсутвие зависания контактов. Наиболее близким к изобретанию яв ляется устройство для контроля механических параметров микровыключателя содержащее шаговый привод, блок управления с несколькими входами и вы ходами, счетный блок, датчик фиксированных усилий, установленный с воз можностью воздействия на контролируе мой микровыключатель, один из входов блока управления предназначен для соединения с контактной системой контролируемого микровыключателя, а его второй вход подключен к выходу датчика фиксирОЕГаиных усилий, один и выходов блока управления соединен с одним из входов счетного блока, а другой его выход соединен с входом шагового привода 21 . Однако это устройство имеет недостаточную точность измерений ходов из-за деформаций электронного динамометра. При большой жесткости динамометра необходимо увеличипать чувст вительность усилителя, что снижает точность измерения усилий и помехоустойчивость устройства. Положение усугубляется необходимостью контролировать разные типы микровыключа- телей, имеющие большие различия в ве личинах ходов и усилий. Кроме того, это устройство не позволяет контролировать отсутствие зависания контактов, так как при остановке привод в момент отрыва подвижного контакта от неподвижного электронный динамометр способствует переключению подвижного контакта. Цель изобретения - расширение функциональных возможностей и повышеиие точности контроля. 68 Поставленная цель достигается тем, что устройство для контроля механических параметров микроныключателя, содержап(ее шаговый привод, блок управления с несколькими входами и выходами, счетньй блок, датчик фиксированных усилий, установленный с возможностью воздействия на контролируемый микровъпключатель, один из входов блока, управления предназначен для соединения с контактной системой контролируемого микровыключателя, а его второй вход подключен к выходу датчика фиксированных усилий, один из выходов.блока управления соединен с одним из входов счетного блока, а другой его выход соединен с входом шагового привода, снабжено делителем Частоты, реле времени, пружиной, имеющей эталонное усилие, фиксатором и по меньше мере одним реверсивным счетчиком, при этом выход шагового привода через указаинук пружину и фиксатор связан с датчиком фиксированных усилий, вход реле времени предназначен для соединения с контактной системой микровыключателя, а выход реле времени соединен с третьим входом блока управления, третий выход которого подключен к фиксатору, а второй выход блока управления связан с входом делителя частоты, первый выход которого подключен к другому входу счетного блока, а йругой выход делителя частоты соединен с входами синхронизации реверсивных счетчиков, входы сложения и вычитания последних подключены к выходам блока управления. На фиг. 1 приведена структурная схема устройства для контроля механических параметров микровыключателя; на фиг. 2 - временная диаграмма работы устройства. Паговый привод /двигатель) 1 через параллельно установленные пружину 2, имекщую эталонное усилие, и фиксатор 3 связан с датчиком 4 фиксированных усилий, установленным с возможностью воздействия на контролируемый микровыключатель 5, контактная система которого соединена с реле времени и блоком 7 управления, один з выходов которого подключен к расределит€лю 8 и делителю 9 частоты, оединенному со счетным блоком 10, первьи реверсивным счетчиком 11 для змерения усилия Лрямого срабатывания вторым реверсивным счетчиком 12 для измерения усилия обратного срабатьшания. На временной диаграмме приняты следующие условные обозначения: П - положение датчика 4 фиксированных усилий; ИП - исходное положение НП - нулевое положение, при котором датчик фиксйрованньгк усилий 4 касает ся приводного элемента микровыключателя 5; ППС - положен1|е при прямом срабатьшании микровыключател 5; ПОС положение при обратном срабатьтании микровыключателя 5; КП - конечное по ложение, при котором датчик фиксированных усилий 4 вырабатывает сигна. о достижении предельного усилия. YcTpoliCTBo работает следующим об разом,. При пуске в гомент времени 10 бло управления 7. В1фабатывает команду И на вюшочение фиксатора 3, после чего в момент времени Т1 подает импульсы на распределитель 8 и включает прямо ход шагового привода {двигателя)I , который через фиксатор 3 перемещает датчик 4 фиксированных усилий в направлении микровыключателя 5. В момент 12 сасания приводного элемё нта микровыключателя 5 датчиком 4 фиксированных усилий последний вырабатывает сигнал соприкоснования, по которому блок 7 управления вырабатывает на счетный блок 1-0 команду в измерения прямого хода, одновременно на первый и второй реверсивные счетчики подаются команды К и V вычитания. С этого момента импульсы с блока управления- 7 поступают не только на распределитель 8, но также через делитель 9 частоты с двумя выхода ш на счетный вход счетного блока 10 и счетные входы первого 11 и второгб 12 реверсивных счетчиков. Коэффициент деления делителя частоты 9 по пepвo fy выходу установлен таким что счетный блок 10 измеряет абсолютные перемещения датчика 4 фиксированных усилий. В момент ТЗ 1 азрыъа цепи нормально-закрытых контактов микровыключателя 5 шаговый двигатель 1 останавливается и сигналы В, VKV и М снимаются. Таким образом, счет ный блок 10 измеряет величину пряг мого хода. От момента времени ТЗ ДО момента Т4 реле 6 времени контролит рует время переключения контактов, после чего шаговый двигатель 1 начинает перемещать датчик 4 фиксированных усилий в обратном напрайлении. Одновременно с блока 7 управления на счетный блок 10 поступает команда измерения дифференциального хода, а на второй реверсивный счетчик 12 поступает команда Н. В момент Т5 разрьюа цепи нормацьно-разомкнутых контактов микровыключателя 5 команды Г и Н снимаются, шаговый двигатель 1 останавливается и начинается контроль времени переключения контактов, С момент времени Т6 шаговый двигатель 1 перемещает-датчик 4 фиксированных усилий в , направлении микровьшлючателя 5, однов ременно на счетный блок 10 поступает команда Д измерения дополнительного хода. В момент Т7, когда усилие прикладываемое к микррвыключателю 5, достигает предельного значения, датчик 4 фиксированных усилий вьодает на блок 7 управлениякоманду Б по которой прекращается измерение дополнительного хода и реверси1 уется шаговый двигатель 1. В момент времени Т8, когда датчик 4 фиксированных усилнй отрывается от приводного элемента микровыключателя 5, шаговый двигатель 1 останавливается и отключения фиксатора 3 начинает через пружину 2 перемещать датчик 4 фиксированных усилий в направлении микровыключателя 5, С момента 19 соприкоснов1ения до момента Т10 прямого срабатыования на первый П и второй 12 реверсивные счетчики поступают сигналы сложения л и Н. После этого шаговый двигатель 1 реверсируется и до момента Т11 обратного срабатывания на второй реверсивный счетчик 12 поступает команда М вычитания. Коэффициент деления делителя частоты 9 ко второму выходу выбран таким образом, чтобы перрый 11 и второй 12 ре- Jвepcивныe счетчики измеряли .величины УСИЛИЙ, пропорциональгале деформациям пружины 2. Первый реверсивный счетчик 11 от момента 12 до ТЗ замеряет величину деформации пружины микровыключателя 5 с обратным зиаком. Деформ ии пружины микровыключателя 5 при прямом и обратном счете взаимно компенсируются и в первом реверсивном счетчике I1 остается величина деформации пружины 2,равная усилию прямого срабатываиия. Усилие обратного срабатывания измеряется aWanoгичио вторым реверсивным счетчиком 12. Контроль отсутствия зависания контактов осуществляется следующим Образом. Если после остановки приводного элемента подвижный контакт автоматически перебросится, то микровыключатель признается годным, если не
перебросится, а остановится в промежуточном положении, то микровыключатель считается забракованным по причине зависания контактов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для проверки микропереключателей | 1978 |
|
SU748251A1 |
| Устройство для измерения упругих характеристик пружин | 1982 |
|
SU1016700A1 |
| Устройство для контроля упругих и линейных характеристик пружин | 1983 |
|
SU1113688A1 |
| Устройство для проверки коммутирующей аппаратуры | 1982 |
|
SU1023258A1 |
| Устройство для промывки и контроля реле | 1983 |
|
SU1205203A1 |
| Устройство для контроля ходов приводного элемента микровыключателя | 1985 |
|
SU1339500A2 |
| Устройство для проверки микровыключателей на отсутствие зависания контактов | 1976 |
|
SU631846A1 |
| Устройство для измерения механических параметров микровыключателя | 1981 |
|
SU1003027A1 |
| Адаптивная система для активного контроля размеров деталей | 1981 |
|
SU998091A1 |
| Устройство для замера ходов приводного элемента микровыключателя | 1977 |
|
SU662914A1 |
УСТРОЙСТВО ДЛЯ. КОНТРОЛЯ МЕХАНИЧЕСКЖ ПАРАМЕТРОВ МИКРОВЬШВДЧАТЕЛЯ, содержащее шаговьй привод, блок управления с несколькими входагда и выходами, счетный блок, датчик фиксированных усилий, установленный с возможностью воздействия на контролируемый микровыключатель, один из входов блока управления предназначен для соединения с контактной системой ко тролируемого микровыключателя, и его второй вход подключен к выходу датчика фиксированных усилий, один из выходов блока управления соединен с одним из входов счетного блока, а другой его выход соединен с входом шагового привода, отличающ, е е с я тем что, с целью расширения функциональных возможностей и повышения точности контроля, оно снабжено делителем частоты, реле времени, пружиной, шиекщей эталонное усилие, фиксатором и по меньшей мере одним реверсивньм счетчиком, при этом выход шагового привода через указанную прзтеину и фиксатор связан с Дйтчикрм фиксированных усилий, вход реле времени предназначен для соединения с контактной системой микровыключателя, а выход реле времени соединен с третьим входом блок а управления, выход которого подключен к фиксатору, а второй выход блока (Л управления связан с входом делителя частоты, первый выход которого под- . с ключен к другому входу счетного блока, а другой выход делителя частоты § соединен с входами синхронизации реверсивных счетчиков, входы сложения j и вычитания последних подключены к выходам блока управления. ел ОР о о: 00
А
6 в
г
й
ж -
ff ff -
/ -
/f- ж -
Фег.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения перемещения приводного элемента микровыключателя | 1974 |
|
SU546774A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для контроля механических параметров микровыключателей | 1977 |
|
SU738002A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
