1 -1
Изобретение относится к машиностроению и может быть использовано при производстве прецизионных пружин как в качестве средства контроля выходных параметров пружин, так и в качестве прибора, применяемого при подборе требуемых упругих и линейных характеристик прецизионных пружин при сборке гидротопливных агрегатов.
Известны устройства с эталонными упругими элементами, в которых величина реактивного усилия контролируемой пружины определяется величиной деформации эталонного упругого элемента С1.
Недостатком этого устройства являются ограниченные возможности, так как при его помощи возможно осуществлять контроль пружин либо в очень узком диапазоне усилий (деформаций), либо конкретно выбранной пружины. Расширение диапазона измеряемьпс усилий приводит к заметному появлению нелинейности характеристики эталонного упругого элемента.
Наиболее близким по технической сути к изобретению является устройство для замера ходов приводного элемента микровыключателя, содержащее силоприемную площадку, выполненную в виде нажимного элемента динамометра, механизм привода силоприемной площадки, содержащий шаговый электродвигатель с редуктором, шток, передающий на динамометр усилие перемещения, датчики предельного усилия и соприкосновения, счетный блок, электрически связанньй с электродвигателем через блок реверса, генератор тактовых импульсов, электрически связанный с электродвигателем и счетным блоком С23.
Недостатком известного устройства являются ограниченные технологические возможности, так как с его помощью можно только определить момент .брабатывания микропереключателя при достижении заданного усилия прямого срабатывания и невозможен контроль упругих и линейных характеристик пружин в широком диапазоне усилий и перемещений. Кроме того, не- возможно осуществлять контроль пружин в режиме усилие - деформация, при котором задают величину реактивного усилия контролируемой пружины и определяют величину ее деформации, т.е. высоту в деформированном состоянии.
136882
Целью изобретения является расши-. рение технологических возможностей зй счет возможности определения величины деформации и повьшение точности контроля.
Указанная цель достигается тем, что устройство для контроля.упругих и линейных характеристик пружин, содержащее силоприемную площадку, размещенную между контролируемой прз жиной и эталонным упругим элементом, основной привод силоприемной площадки, выполненный в виде шагового двигателя с редуктором, систему измерения величины реактивного усилия контролируемой пружины, состоящзпо из генератора тактовых импульсов, командного блока управления, входы которого связаны с выходом генератора тактовых импульсов и датчика положения силоприемной площадки, реверсивного счетчика импульсов, связанного прямой и обратной связью с командным блоком управления, и блока управления шаговым двигателем, вход которого связан с выходом командного блока управления, а выход с шаговым двигателем основного привода силоприемной площадки, снабжено дополнительным приводом силоприем ной площадки, выполненным в вида шагового двигателя с редуктором, и до.полнительной системой измерения величины деформации контролируемой пружины, состоящей из генератора тактовых
5 импульсов, командного блока управления, входы которого связаны с выходом генератора тактовых импульсов и датчика положения силоприемной площадки, -реверсивного счетчика импуль0 сов, связанного прямой и обратной связью с командным блоком управления, и блока управления шаговым дви1;ателем, вход которого связан с выходом командного блока управления, .
5 а выход - с шаговым двигателем дополнительного привода, при этом редукторы основного и дополнительного приводов выполнены червячно- винтовыми с одинаковыми передаточными отно-0 шениями, причем редуктор основного привода установлен на подвижной площадке и его винт жестко связан с подвижной плитой, на которую опирается эталонный упругий элемент, редуктор
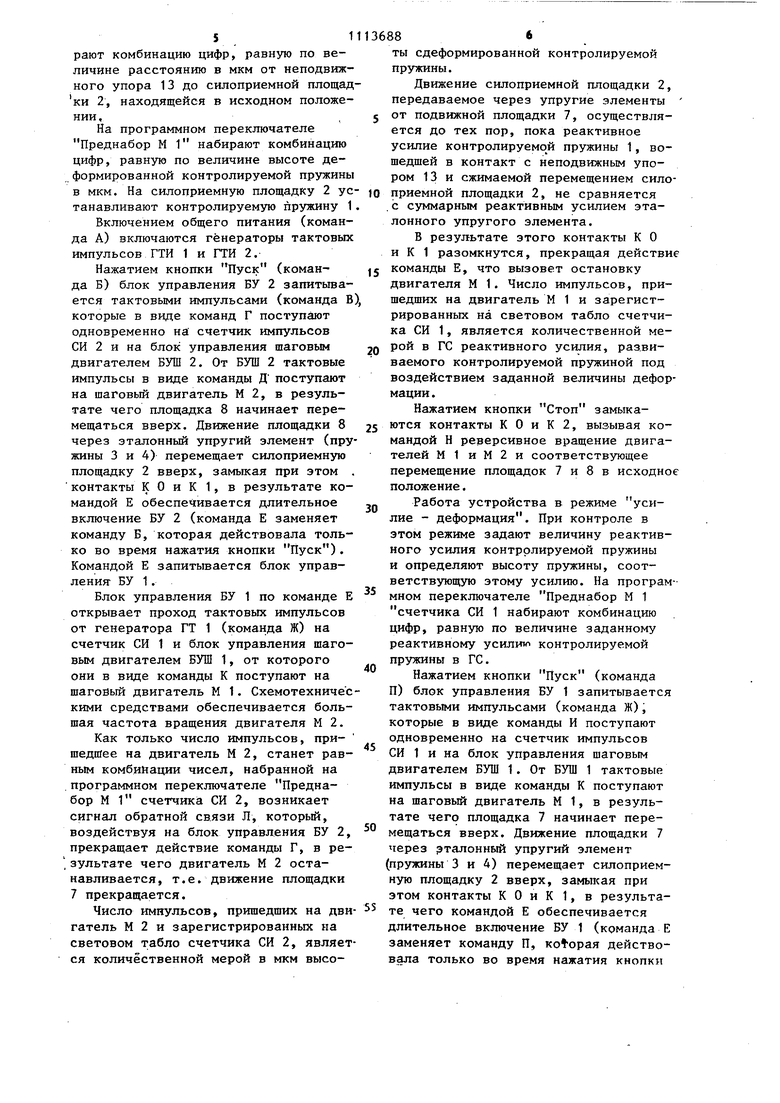
5 j дополнительного привода установлен на жестко соединенной с основанием устройства неподвижной площадке и его винт жестко связан с подвижной плитой. 3: на которой установлен редуктор основ ного прицода, а соотношение между жесткостью эталонного упругого эле мента на всей длине его деформации и передаточным отношением каясдого из редукторов выбирают прямо пропорционал ным. Эталонный упругий элемент выполняют комбинированным в виде одновременно воздейс;твующих на силоприемную площадку пружин растяжения и сжатия. Подбором геометрических параметров суммарную жесткость комбинированного упругого элемента выполняют равной 1 ГС/мкм- (для этого используют четыре эталонных пружины: две сжатия и две - растяжения). На чертеже представлено устройств для контроля упругих и линейных характеристик пружин. Устройство включает в себя контро лируемую пружину 1, силоприемную площадку 2, закрепленную между эталонными пружинами сжатия 3 и растяжения 4 с возможностью перемещения по направляющим 5, закрепленным на основании 6. На направляющих 5 установлены также с возможностью перемещения по ним верхняя 7 и нижняя 8 подвижные плиты. Плита 7 перемещаетс по направляющим 5 под воздействием шагового двигателя 9 через червячновинтовой,редуктор 10, передаточное отношение которого обеспечивает перемещение плиты 7 на 1 мкм при о- работке двигателем одного импульса. Плита 8 выполнена аналогично плите 7 с приводом от шагового двигателя 11. через червячно-винтовой редуктор 12 передаточное отношение которого также обеспечивает перемещение плиты 8 на 1 мкм при отработке двигателем 1 одного импульса. Управление движением двигателя 9 осуществляется от блока управления шаговым двигателем БУШ 1, а двигателя 11 - от БУШ 2. Тактовые импульсы на БУШ 1 поступают от генератора тактовьгх импульсов ГТИ 1 через командньй блок управления . Тактовые импульсы на БУШ 2 поступают от ГТИ 2 через командный блок управления БУ 2. Регистрация импульсов, при ходящих на БУШ 1, осуществляется счетчиком импульсов СИ 1 и соответственно - приходящих на БУШ 2 - счет чиком СИ 2. Счетчики СИ 1 и СИ 2 выполнены реверсивными, каждь1й с двумя 6884 программными переключателями: Преднабор МАХ и Преднабор Ml. Взаимное расположение силоприемной площадки 2 и плиты 7 контролируется группой контактов К.О, К 1 и К 2 электроконтактного датчика высокой избирательной способности (12 мкм). В исходном положении все контакты находятся в разомкнутом состоЯНИИ. Для подготовки устройства к работе необходимо провести настроечные перемещения. Настроечными перемещениями двигателей 9 и 11 плиты 7 и 8 отводятся в исходное положение, при котором силоприемная площадка 2 оказывается в упругоподвешенном состоянии йезкду . эталонными пружинами сжатия 3 и растяжения 4. При этом положение электроконтактного датчика, жестко закрепленного на плите 8, регулируется по высоте таким образом, чтобы при контакте его измерительного штыря с силоприемной площадкой контакты КО, К1 иК2 были бы разомкнуты. Настроечным перемещением от двигателя 11 силоизмерительная площадка 2 вводится в контакт с неподвижным упором 13, т.е. до состояния L- О, где L - расстояние между силоприемной площадкой 2 и неподвижным упором 13. Обратным перемещением от двигателя 11 система отводится в исходное положение. При обратном перемещении от положения L О до -L L производится регистрация импульсов, поступающих на двигатель 11. Поскольку один импульс, поданный на шаговый двигатель, соответствует 1 мкм перемещения, то количество зафиксированных импульсов является мерой числа, выраженной в мкм. Если обозначить количество импульсов значением W, то- N L . Значение N фиксируется на переключателе Преднабор МАХ СИ 2 истановится начальной точкой отсчета высоты сдеформированной при контроле пружины. Работа устройства в режиме.деформация - усилие. При контроле в этом режиме задают высоту контролируемой пружины в деформированном состоянии и определяют величину реактивного усилия, которое развивает при этом пружина. На программном переключателе Преднабор МАХ счетчика СИ 2 наби511
рают комбинацию цифр, равную по величине расстоянию в мкм от неподвижного упора 13 до силоприемной площадки 2, находящейся в исходном положении ,
На программном переключателе
Преднабор М 1 набирают комбинацию цифр, равную по величине высоте деформированной контролируемой пружины в мкм. На силоприемную площадку 2 устанавливают контролируемую пружину 1.
Включением общего питания (команда А) включаются генераторы тактовых импульсов ГТИ 1 и ГТИ 2.
Нажатием кнопки Пуск (команда Б) блок управления БУ 2 запитывается тактовыми импульсами (команда В), которые в виде команд Г поступают одновременно на: счетчик импульсов СИ 2 и на блок управления шаговым двигателем БУШ 2. От БУШ 2 тактовые импульсы в виде команды Д поступают на шаговый двигатель М 2, в результате чего площадка 8 начинает перемещаться вверх. Движение площадки 8 через эталонный упругий элемент (пружины 3 и 4) перемещает силоприемную площадку 2 вверх, замыкая при этом . контакты К О и К 1, в результате командой Е обеспечивается длительное включение БУ 2 (команда Е заменяет команду Б, которая действовала только во время нажатия кнопки Пуск). Командой Е запитьшается блок управления БУ 1 .
Блок управления БУ 1 по команде Е открывает проход тактовых импульсов от генератора ГТ 1 (команда Ж) на счетчик СИ 1 и блок управления шаговым двигателем БУШ 1, от которого они в виде команды К поступают на шаговый двигатель М 1. Схемотехническими средствами обеспечивается большая частота вращения двигателя М 2.
Как только число импульсов, пришедшее на двигатель М 2, станет равным комбинации чисел, набранной на программном переключателе Преднабор Ml счетчика СИ 2, возникает сигнал обратной связи Л, который, оздействуя на блок управления БУ 2, рекращает действие команды Г, в результате чего двигатель М 2 останавливается, т.е. движение площадки 7 прекращается.
Число импульсов, пришедших на двигатель М 2 и зарегистрированных на световом табло счетчика СИ 2, является количественной мерой в мкм высо36886
ты сдеформированной контролируемой пружины.
Движение силоприемной п.пощадки 2, передаваемое через упругие элементы 5 от подвижной площадки 7, осуществляется до тех пор, пока реактивное усилие контролируемо й пружины 1, вошедшей в контакт с неподвижным упором 13 и сжимаемой перемещением сило0 приемной площадки 2, не сравняется ,с суммарным реактивным усилием эталонного упругого элемента.
В результате этого контакты К О и К 1 разомкнутся, прекращая действие 5 команды Е, что вызовет остановку
двигателя М 1. Число импульсов, пришедших на двигатель М 1 и зарегистрированных на световом табло счетчика СИ 1, является количественной меQ рой в ГС реактивного усилия, развиваемого контролируемой пружиной под воздействием заданной величины деформации .
Нажатием кнопки Стоп замыка5 ются контакты К О и К 2, вызывая командой Н реверсивное вращение двигателей Ml и М 2 и соответствующее перемещение площадок 7 и 8 в исходное положение.
Работа устройства в режиме усилие - деформация. При контроле в этом режиме задают величину реактивного усилия контролируемой пружины и определяют высоту пружины, соответствующую этому усилию. На программном переключателе Преднабор М 1 счетчика СИ 1 набирают комбинацию цифр, равную по величине заданному реактивному усилию контролируемой пружины в ГС.
Нажатием кнопки Пуск (команда П) блок управления БУ 1 запитывается тактовыми импульсами (команда Ж), которые в виде команды И поступают одновременно на счетчик импульсов СИ 1 и на блок управления шаговым двигателем БУШ 1. От БУШ 1 тактовые импульсы в виде команды К поступают на шаговый двигатель М 1, в результате чего площадка 7 начинает перемещаться вверх. Движение площадки 7 через эталонный упругий элемент (пружины 3 и А) перемещает силоприемную площадку 2 вверх, замыкая при этом контакты К О и К 1, в результаS те чего командой Е обеспечивается длительное включение БУ 1 (команда Е заменяет команду П, которая действовала только во время нажатия кнопки 71 Пуск). Командой Е запитывается бло управления БУ 2, который открывает проход тактовых импульсов от генератора ГТИ 2 на счетчик СИ 2 и на блок управления шаговым двигателем БУШ 2. От БУШ 2 тактовые импульсы в виде команды Д поступают на шаговый двигатель М 2. В этом случае обеспечивается боль шая частота вращения двигателя Ml, Как толькоЧИСЛО импульсов, пришедшее на двигатель М 1, станет равным комбинации чисел, набранной на программном переключателе Преднабор /М 1 счетчика СИ 1, возникает сигнал обратной связи Р, который, воздействуя на блок управления БУ 1, прекращает действие команды Г, в результате чего двигатель М 1 останавлива,ется, а двигатель М 2 продолжает перемещать силоприемную площадку 2 до тех пор, пока величина реактивного усилия сжимаемой контролируемой пру8жины не сравняется с суммарным реактивным усилием эталонного упругого элемента. После этого контакты К О и К 1 размыкаются и двигатель М 2 останавливается. На световом табло счетчика СИ 1 зафиксируется величина заданного реактивного усилия, а на световом табло счетчика СИ 2 - высота деформированной контролируемой пружины, соответствующая заданной величине усилия. Возврат элементов устройства в исходное положение осущертвляется тем же самым способом, что при ра- , боте устройства в режиме деформация - усилие. Использование устройства для контроля упругих и линейных характеристик пружин позволит осуществить контроль всей номенклатуры пружин, применяемых в отрасли, при значительном повышении точности измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля упругих и линейных характеристик пружин | 1985 |
|
SU1270590A1 |
| Автоматическая установка для присоединения проволочных выводов | 1985 |
|
SU1312869A1 |
| Прибор для определения размера обуви | 1986 |
|
SU1391587A1 |
| Бесшаботный горизонтальный молот | 1982 |
|
SU1045988A1 |
| Устройство для контроля оперативной конвейерной памяти | 1989 |
|
SU1633463A1 |
| Устройство для проверки синусно-косинусных вращающихся трансформаторов | 1980 |
|
SU924738A1 |
| Устройство для контроля механических параметров микровыключателя | 1982 |
|
SU1053068A1 |
| Устройство для управления автоматизированным прессовым оборудованием | 1983 |
|
SU1131678A1 |
| Устройство для контроля функционирования логических блоков | 1986 |
|
SU1327107A1 |
| Установка для присоединения проволочных выводов | 1991 |
|
SU1773643A1 |
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ УПРУГИХ И ЛИНЕЙНЫХ ХАРАКТЕРИСТИК ПРУЖИН, содержащее силоприемную площадку, размещенную между контролируемой пружиной и эталонным упругим элементом, основной привод силоприемной площадки, выполненный в виде шагового двигателя с редуктором, систему измерения величины реактивного усилия контролируемой пружины, состоящую из генератора тактовых импульсов, командного блока управления, входы которого связаны с выходом генератора тактовых импульсов и датчика положения силоПриемной площадки, реверсивного счетчика импульсов, связанного прямой и обратной связью с командным блоком управления, и блока управления шаговым двигателем, вход которого связан с выходом командного блока управления, а выход-с шаговым двигателем основного привода силоприемной площадки, отличающееся тем, что, с целью расширения функциональных возможностей устройства за счет возможности определения величины деформации контролируемой пружины и повышения точности контроля, устройство снабжено дополнительным приводом силоприемной площадки, вьтолненным в виде шагового двигателя с редуктором, и дополнительной системой измерения величины деформации контролируемой пружины, состоящей из генератора тактовых импульсов, командного блока управления, входы которого связаны с выходом генератора тактовых импульсов и датчика положения силоприемной площадки, реверсивного счетчика импульсов, связанного прямой и обратной связью с командным блоком управления, и блока управле(Л ния шаговым двигателем, вход которого связан с выходом командного блока управления, а выход - с шаговым двигателем дополнительного привода, при этом редукторы основного и дополнительного приводов выполнены червячно-винтовыми с одинаковыми передаточными отношениями, причем редуктор основного привода установлен на под00 О5 вижной площадке и его винт жестко связан с подвижной плитой, на котосх рую опирается эталонный упругий эле00 мент, редуктор дополнительного привода установлен на жестко соединенной с основанием устройства неподвижной площадке и его винт жестко связан с подвижной плитой, на которой установлен редуктор основного привода, а соотношение между жесткостью эталонного упругого элемента «а всей длине его деформации и передаточньм отношением каждого из редукторов выбирают прямо пропорциональным.
- rr/f/ I
J, fel.
-Д- ГТН2 I
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автомат для контроля винтовых цилиндрических пружин сжатия | 1976 |
|
SU623118A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для замера ходов приводного элемента микровыключателя | 1977 |
|
SU662914A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
