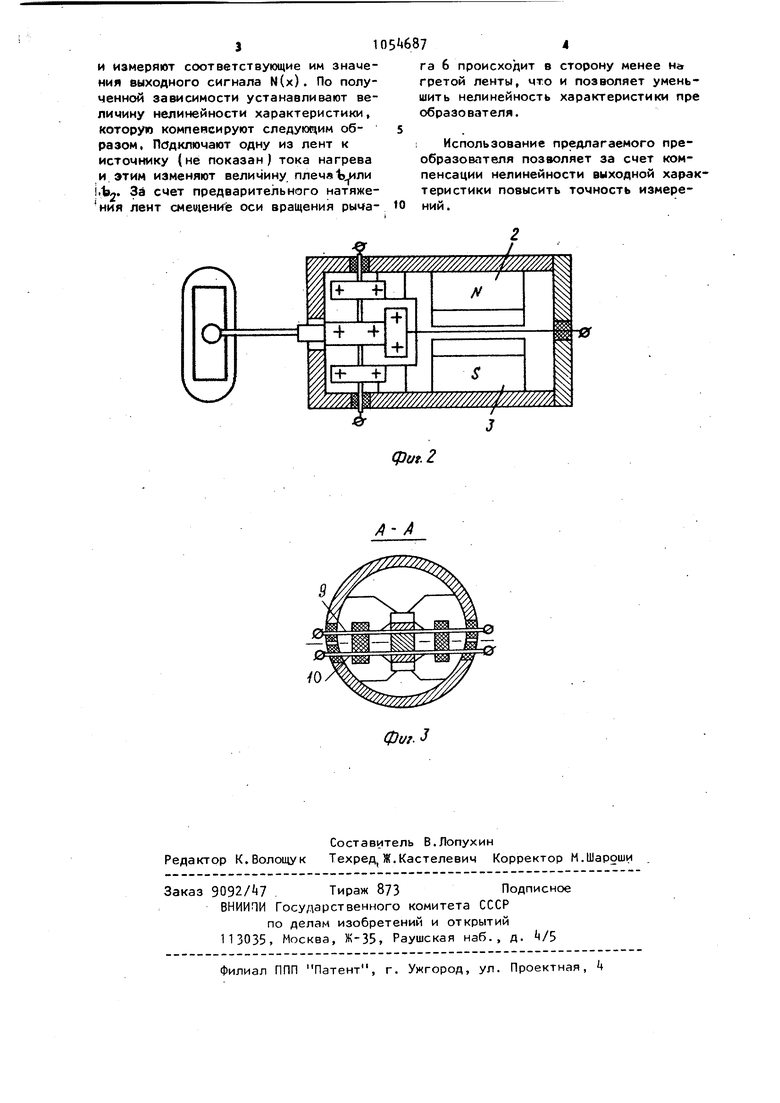
Изобретение относится к средствак измерения и может быть использовано при контроле легкодеформируемых объектов . Известно устройство для измерения перемещений, содержацее корпус, чув ствительный элемент в виде двух параллельных струи, закреплнных |одним концом в корпусе, постоянные магниты возбуждения колебаний струн, трех плечий рычаг, одним плечом которого является измерительный наконечник а в двух других закреплены струны, и ленточный подвес рычага tlJ. Недостатком устройства является сложность настройки на заданную чувствительность. Наиболее близким к изобретению является частотный дифференциальный преобразователь перемещений, содержащий корпус, размещенный в Нем чувствительный элемент, выполнен ный в виде расположенных в поле постоянных магнитов двух параллельных струн, закрепленных одним концом в корпусе, трехплечий рычаг, на двух плечах которого закреплены BTO- рые концы струн, а третье плечо пред назначено для взаимодействия с объек том, и ленточный подвес рычага, соетоящий из двух электрически изолированных параллельных лент . Недостатком известного преобразователя является невозможность регули ровки нелинейности выходной характеристики преобразователя, что снижает точность измерений. Цель изобретения - повышение точности измерений путем устранения нелинейности характеристики. Поставленная цель достигается тем что в частотном дифференциальном преобразователе перемещений, содержащем корпус, размещенный в нем чувствит льный элемент, выполненный в виде расположенных в поле постоянных магнитов двух параллельных струн закрепленных одним концс5м в корпусе, трехплечий рычаг, на двух плечах которого закреплены вторые концы струн а третье плечо предназначено для вза имодействия с объектом, и ленточный подвес рычага, состоящий из двух электрически изолированных параллель ных лент, оси лент подвеса расположе ны в плоскости перпендикулярной струнам. На фиг.1 представлен преобразователь, разрез; на фиг.2 - то же, вид сверху; на фиг.З - разрез А-А на фиг.1. Частотный дифференциальный преобразователь перемещений содержит кор пус 1, размеченный в нем чувствительный элемент, выполненный в виде расположенных в поле постоянных магнитов 2 и 3 двух параллельных струн t и 5 закрепленных одним концом в корпусе 1, трехплечий рычаг 6, на двух плечах которого закреплены вторые коицы струн и 5 а третье плечо 7 предназначено для взаимодействия с объектом 8, и ленточный подвес рычага, состоящий из двух электрически изолированных параллельных лент 9 и 10, оси которых расположены в плоскости перпендикулярной струнам i и 5. Ленты 9 и 10 имеют предварительное натяжение и контакты с обеих сторон для подключения к источнику тока нагрева. Выходной сигнал преобразователя является функцией нескольких параметров, значения которых определяют характер и величину нелинейности зависимости выходного сигнала N(x) от измеряемой величины перемещения х. NU) N(f,f,t,,b2,x). (} где N(X) - величина сигнала преоьра-; зователя, зависящая от режима измерения частот f и fg струн i и 5 соответственно. Ъ, - расстояния от оси вращения рычага 6 до струн и 5. Нелинейные члены разложения функции (1 ) в степенной ряд существенно зависят от величины изменения плеч Ъ и Ъ рычага в процессе изготовления. Ком Апенсирование нелинейности выходной характеристи1в преобразователя, обусловленной несоответствием указанных плеч расчетным, позволяет повысить точность измерений. Преобразователь работает следующим образом. Перемещение свободного конца плеча 7 вызывает изменения положения рычага 6, что, 6 свою очередь, вызывает изменение натяжения струн и их частоты f и fy колебаний, отношение или разность которых регистрируется вы)одным блоком (не показан). При градуировке преобразователя сообают известные перемещения х плечу 7 и измеряют соответствующие им знаие ния выходного сигнала N(x). По полу ценной зависимости устанавливают ве личину нелинейности характеристики, которую компевсируют следующим образом, Подключают одну из лент к источнику (не показан) тока нагрева и этим изменяют величину плечаЬ 1ли i.. Зй счет предварительного натяже ния лент смещение оси вращения рыча 74га 6 происходит в сторону менее н& гретой ленты, что и позволяет уменьшить нелинейность характеристики пре образователя. Использование предлагаемого преобразователя позволяет за счет компенсации нелинейности выходной характеристики повысить точность измереНИИ.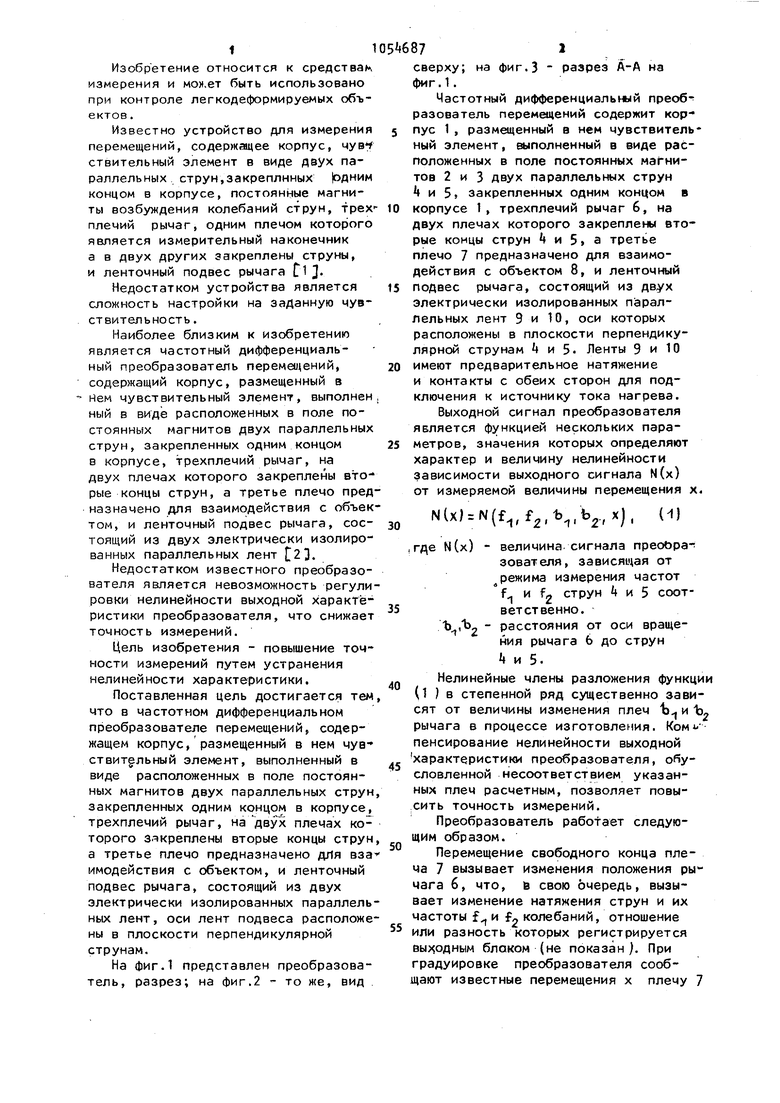
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотный дифференциальный датчик перемещения | 1976 |
|
SU676864A1 |
| Способ поверки измерительного устройства с дифференциальным струнным преобразователем | 1982 |
|
SU1272116A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ СТРУННЫЙ АКСЕЛЕРОМЕТР И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2004 |
|
RU2258230C1 |
| АКСЕЛЕРОМЕТР | 1999 |
|
RU2191390C2 |
| Способ измерения ускорения | 1979 |
|
SU838588A1 |
| Струнный акселерометр | 1976 |
|
SU657355A1 |
| Акселерометр | 1978 |
|
SU748300A1 |
| Струнный преобразователь для измерения механических величин | 1981 |
|
SU954799A1 |
| Измерительная головка | 1990 |
|
SU1780930A1 |
| Струнный гравиметр | 1975 |
|
SU545949A1 |
ЧАСТОТНЫЙ ДИФФЕРЕНЦИАЛЬНЫ .ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ, содержащий корпус, размещенный в нем чувствительный элемент, выполненный в виде расположенных в поле пocтoя ныx магнитов двух параллельных струн,закрепленных одним концом в корпусе, трехплечий рычаг, на двух плечах которого закреплены вторые ко«цы струн, а третье плечо предназначено для взаимодействия с объектом, и ленточный подвес рычага, состоящий из двух электрически изолированных параллельных лент, отличающий ся тем, что,с целью повышения точности измерений путем устранения нелинейности характеристики, оси лент подвеса расположены в плоскости перпендикулярной струнам. сл 4 35 00 -М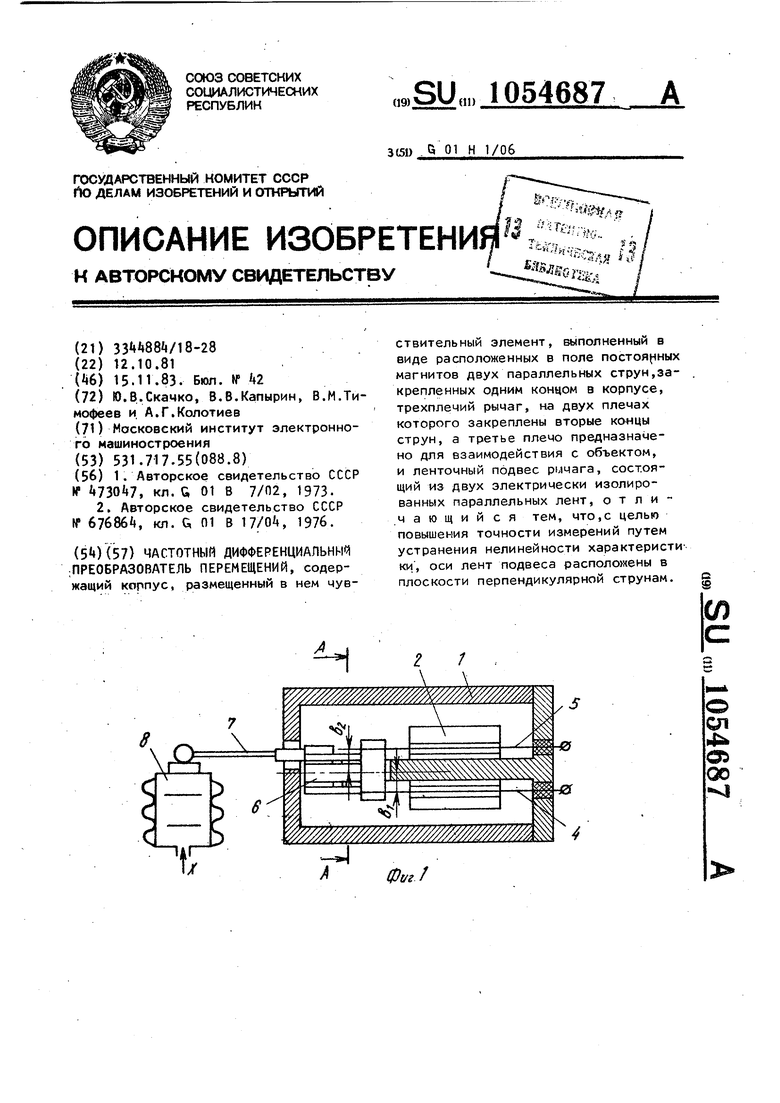
фиг. 2
Фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР V , кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Насос-форсунка | 1944 |
|
SU67686A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| (S) | |||
